Изобретение относится к области железнодорожной автоматики, в частности, к автоматическому регулированию скорости поезда.
Известен способ определения допустимой скорости поезда на участке торможения, Заключающийся в закреплении за каждой точкой пути (каждым участком пути), перед закрытым сигналом, определенной фиксированной (программной) скорости.
Известное устройство определения допустимой скорости, выбранное в качестве прототипа заявляемого устройства, содержит датчик пути и скорости ДПС, делитель частоты Д, измеритель пути ИП и блок программной скорости БПС. Эти узлы являются составной частью системы САУТ и могут быть выполнены на базе счетчиков и программируемого постоянного запоминающего устройства.
Недостаток известного способа и устройства заключается в том, что допустимая скорость поезда на участке торможения зависит не от реального, а от усредненного профиля пути на участке торможения. Во избежание опасной ситуации усреднения
профиля участка торможения приходится осуществлять с запасом в сторону обеспечения большей безопасности. Это увеличивает время хода поезда и снижает пропускную способность.
Цель изобретения состоит в повышении пропускной способности за счет сокращения расчетного тормозного пути.
Поставленная цель достигается тем, что в способе определения допустимой скорости поезда посредством закрепления фиксированной скорости за каждой точкой пути на участке торможения, находится, согласно изобретению, фактический уклон железнодорожного пути и в соответствии с этим корректируется допустимая скорость. Поставленная цель достигается так.-ке тем. что в устройстве определения допустимой скорости на участке торможения, содержащим датчик пути и скорости, к входу которого через делитель подключен измеритель пути, а к выходу - блок программной скорости, согласно изобретению ко второму (параллельному) входу делителя (используется ИМС 564ИЕ15). Подключен указатель уклона, ко второму (параллельному) входу измесо
С
vj ю
го
4 О
ригеля пути - полюс источника питания, а к третьему входу (вход С ИМС К155ИЕ7 определяет режим считывания параллельной или последовательной - схема устройства приема информации САУТ.
Подключение указателя уклона к входу делителя и схемы приема информации САУТ, которая в отличие от типовой схемы фиксирует че длину блок-участка, а расстояние от сигнала до места начала торможения, согласно способу, обеспечивается достижение цели изобретений. Это позволяет сделать вывод, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Пример осуществления способа.
Указатель уклона УУ является основным узлом, который обеспечивает коррекцию тормозной кривой в зависимости от плана пути. Работа указателя УУ основана.на принципе авиационного гирокомпаса (на принципе волчка : вращающееся тело стремится сохранить ось вращения) Если ось вращения гирокомпаса будет расположена строго горизонтально вдоль локомоти- ва.то на уклонах и подъемах продольная ось локомотива и гирокомпаса не будет совпадать. Угол между упомянутыми осями будет определять величину уклона пли подъема. Конструктивно указатель УУ выполнен еле- дующим образом. К корпусу локомотива вдоль его оси прикреплено несколько ОР.ТО- пар с открытым оптическим каналом. К оси гирокомпаса прикрепляется экран с прорезью. Экран перекрывает оптические, ка- налы всех оптопар, кроме одной. Номер открытой оптопары определяет величину уклона или подъема. В случае использования в качестве оптопары с открытым оптическим каналом прибора АОР113А вместо экрана к оси гирокомпаса прикрепляется зеркало. Для упрощения увязки между указателем УУ и делителем Д в качестве делителя вместо ИМС К1555ИЕ7 могут быть использованы ИМС К155ИЕ8 или 564ИЕ15. В случае использования двух последних ИМС между указателем УУ и делителем Д не требуется включения шифратора, который преобразует позиционный код в двоичный. Если же используется ИМС К155ИЕ7, мож- но также обойтись без шифратора, но при этом на экране предусмотрен целый ряд стг.срст .-й. которые при каждом конкретном уклоне (подъеме) открывают оптические каналы одной или нескольких оптопар. Коли- чествб и сочетание открытых оптопар характеризуют (в двоичном коде) величину уклона. (Аналогично перфорированная лента старт-стопных телеграфных аппаратов или бумажная лента ЭВМ НАИРИ и др.).
Таким образом, УУ определяет коэффициент деления делителя. Трансляция импульсов от датчика пути и скорости ДПС к измерителю пути ИП осуществляется через упомянутый делитель, коэффициент деления которого, поставлен в зависимость от величины уклона (подъема). Измеритель пути ИП формирует сигнал на своем выходе от пройденного пути и от уклона, поэтому блок БПС, соединенный с ИП, выдает информацию о допустимой скорости с учетом профиля пути.
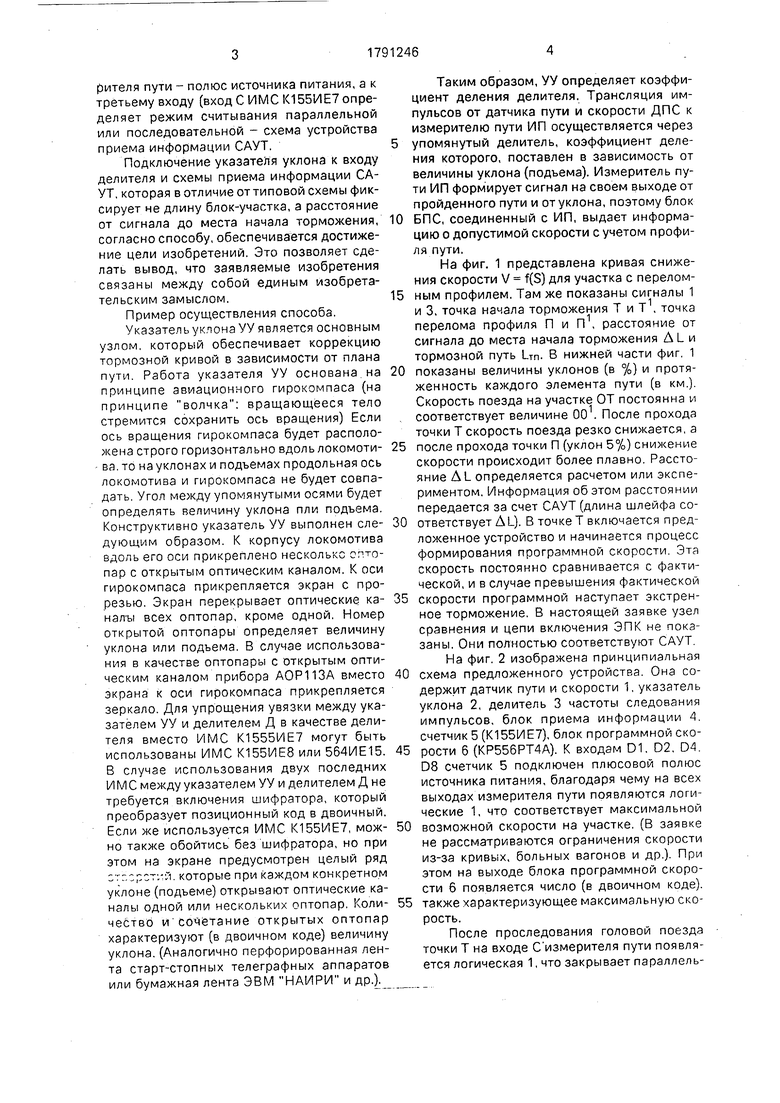
На фиг. 1 представлена кривая снижения скорости V f(S) для участка с переломным профилем. Там же показаны сигналы 1 и 3, точка начала торможения Т и Т1, точка перелома профиля П и П1, расстояние от сигнала до места начала торможения Д и тормозной путь тп. В нижней части фиг. 1 показаны величины уклонов (в %) и протяженность каждого элемента пути (в км.). Скорость поезда на участке ОТ постоянна и соответствует величине 00 . После прохода точки Т скорость поезда резко снижается, а после прохода точки П (уклон 5%) снижение скорости происходит более плавно. Расстояние AL определяется расчетом или экспериментом. Информация об этом расстоянии передается за счет САУТ (длина шлейфа соответствует Д L). В точке Т включается предложенное устройство и начинается процесс формирования программной скорости. Эта скорость постоянно сравнивается с фактической, и в случае превышения фактической скорости программной наступает экстренное торможение. В настоящей заявке узел сравнения и цепи включения ЭПК не показаны. Они полностью соответствуют САУТ.
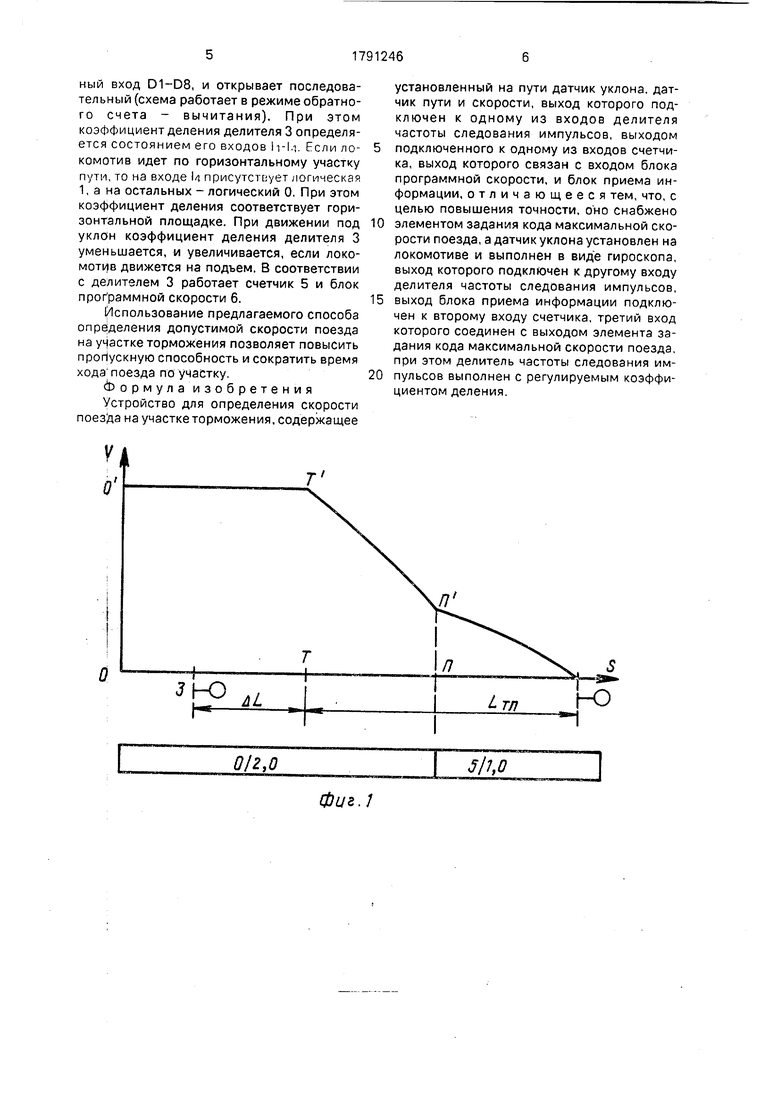
На фиг. 2 изображена принципиальная схема предложенного устройства. Она содержит датчик пути и скорости 1, указатель уклона 2, делитель 3 частоты следования импульсов, блок приема информации 4. счетчик 5 (К155ИЕ7), блок программной скорости 6 (КР556РТ4А). К входам D1, D2, D4. D8 счетчик 5 подключен плюсовой полюс источника питания, благодаря чему на всех выходах измерителя пути появляются логические 1, что соответствует максимальной возможной скорости на участке. (В заявке не рассматриваются ограничения скорости из-за кривых, больных вагонов и др.). При этом на выходе блока программной скорости 6 появляется число (в двоичном коде). также характеризующее максимальную скорость.
После проследования головой поезда точки Т на входе С измерителя пути появляется логическая 1, что закрывает параллельный вход D1-D8, и открывает последовательный (схема работает в режиме обратного счета - вычитания). При этом коэффициент деления делителя 3 определяется состоянием его входов h-l.i. Если локомотив идет по горизонтальному участку пути, то на входе М присутствует логическая 1, а на остальных - логический 0. При этом коэффициент деления соответствует горизонтальной площадке. При движении под уклон коэффициент деления делителя 3 уменьшается, и увеличивается, если локомотив движется на подъем. В соответствии с делителем 3 работает счетчик 5 и блок программной скорости 6.
Использование предлагаемого способа определения допустимой скорости поезда на участке торможения позволяет повысить проНускную способность и сократить время хода поезда по участку.
Формулаизобретения Устройство для определения скорости поезда на участке торможения, содержащее
установленный на пути датчик уклона, датчик пути и скорости, выход которого подключен к одному из входов делителя частоты следования импульсов, выходом
подключенного к одному из входов счетчика, выход которого связан с входом блока программной скорости, и блок приема информации, отличающееся тем, что, с целью повышения точности, оно снабжено
элементом задания кода максимальной скорости поезда, а датчик уклона установлен на локомотиве и выполнен в виде гироскопа, выход которого подключен к другому входу делителя частоты следования импульсов,
выход блока приема информации подключен к второму входу счетчика, третий вход которого соединен с выходом элемента задания кода максимальной скорости поезда, при этом делитель частоты следования импульсов выполнен с регулируемым коэффициентом деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема на локомотиве информации с пути | 1990 |
|
SU1776597A1 |
| СПОСОБ ПЕРЕДАЧИ НА ЛОКОМОТИВ ИНФОРМАЦИИ О СЛЕДОВАНИИ ПО МАРШРУТУ ПО ГЛАВНОМУ ПУТИ С ОТКЛОНЕНИЕМ ИЛИ БЕЗ ОТКЛОНЕНИЯ ПО СТРЕЛКАМ | 2021 |
|
RU2769006C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| Устройство для передачи информации с пути на локомотив | 1989 |
|
SU1808753A1 |
| Устройство для автоматического управления торможением поезда | 1980 |
|
SU925709A1 |
| Устройство для регулирования скорости локомотива | 1990 |
|
SU1766756A1 |
| Система управления движением поездов | 2021 |
|
RU2753988C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| Устройство для регулирования скорости движения поезда | 1989 |
|
SU1787823A1 |
Использование: для определения скорости поезда на участке торможения. Сущность изобретения: устройство содержит датчик пути и скорости, датчик уклона, делитель высоты следования импульсов, блок приема информации, счетчик и блок программной скорости.2 мл.
0/2,0
Фиг./
511,0
Ъ 32
, Jj Qd--174
Ql Q2 Q3
1
Фиг. 2
т
D2
и
08
4Ј
Qf Q2 S3 Ц
АО AI
A. Аз
Wo Mj S02 DO-.
| Казаков А.А | |||
| и др | |||
| Системы интервального регулирования движения поездов | |||
| М.: Транспорт, 1986, с | |||
| Ленточный тормозной башмак | 1922 |
|
SU337A1 |
