w
Ј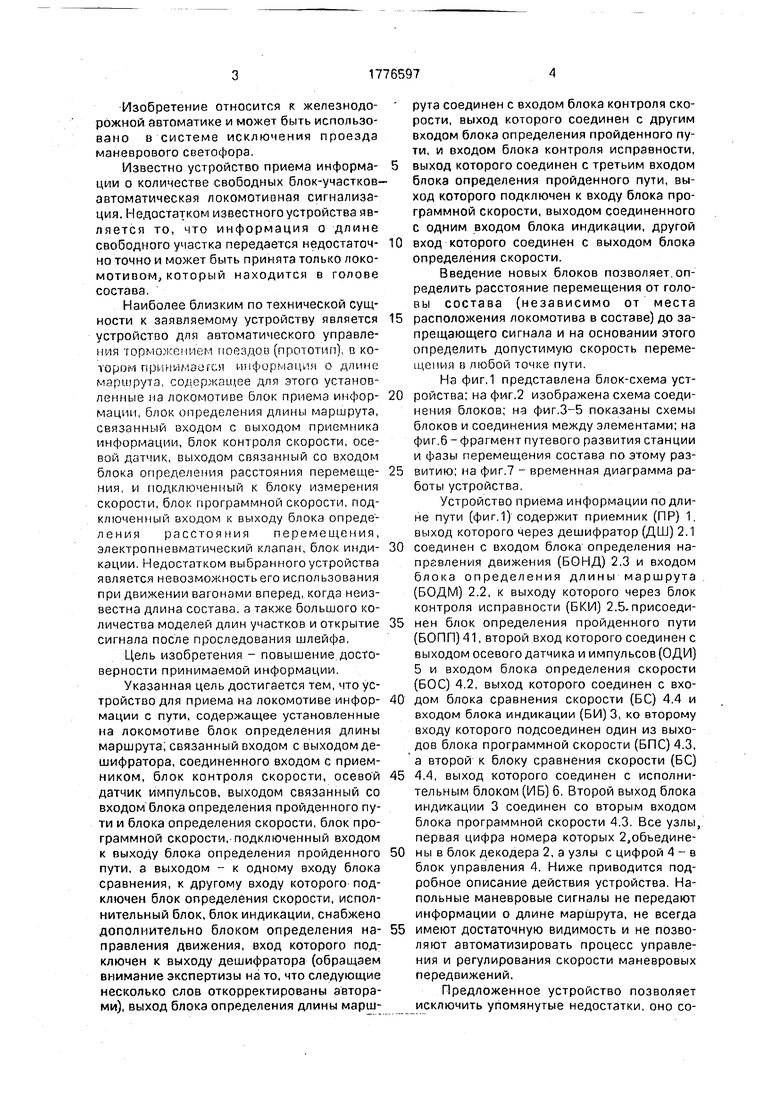



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления маневровыми маршрутами с локомотива | 1983 |
|
SU1168460A1 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ МАНЕВРОВОГО ЛОКОМОТИВА | 1990 |
|
RU2026223C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2025357C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЙ СОСТАВ | 1991 |
|
RU2027622C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ С ПУТИ НА ЛОКОМОТИВ | 1990 |
|
RU2022853C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2022854C1 |
| Устройство для управления торможением маневрового состава | 1983 |
|
SU1131709A1 |
| БОРТОВАЯ АППАРАТУРА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411152C1 |
| Устройство для контроля проследования маневрового локомотива | 1989 |
|
SU1794748A1 |

Изобретение относится к железнодорожной автоматике и может быть использо- вано в системе исключения проезда маневрового светофора. Устройство содержит приемник (1), дешифратор (2), блок (3) индикации, блок (4) определения скорости, осевой датчик (5) импульсов, исполнительный блок (6). 1-2-3-4-6. 1-2-4, 5- 4-6. 7 ил.
фиг.1
IVJ
vi
О
1сл чэ
VI
Изобретение относится к железнодорожной автоматике и может быть использовано в системе исключения проезда маневрового светофора.
Известно устройство приема информа- ции о количестве свободных блок-участков- автоматическая локомотивная сигнализация. Недостатком известного устройства является то, что информация о длине свободного участка передается недостаточ- но точно и может быть принята только локомотивом, который находится в голове состава.
Наиболее близким по технической сущности к заявляемому устройству является устройство для автоматического управления горможенп1,м поезгдов (прототип) в котором пр|.,.я информации о длине маршрута, содержащее для этого установленные на локомотиве блок приема инфор- мацип, блок определения длины маршрута, связанный входом с выходом приемника информации, блок контроля скорости, осевой датчик, выходом связанный со входом блока определения расстояния перемеще- ния, и подключенный к блоку измерения скорости, блок программной скорости, подключенный входом к выходу блока определения расстояния перемещения, электропневмашческий клапан, блок инди- кации. Недостатком выбранного устройства является невозможность его использования при движении вагонами вперед, когда неизвестна длина состава, а также большого количества моделей длин участков и открытие сигнала после проследования шлейфа,
Цель изобретения - повышение достоверности принимаемой информации.
Указанная цель достигается тем, что устройство для приема на локомотиве инфор- мации с пути, содержащее установленные на локомотиве блок определения длины маршрута, связанный входом с выходом дешифратора, соединенного входом с приемником, блок контроля скорости, осевой датчик импульсов, выходом связанный со входом блока определения пройденного пути и блока определения скорости, блок программной скорости, подключенный входом к выходу блока определения пройденного пути, а выходом - к одному входу блока сравнения, к другому входу которого подключен блок определения скорости, исполнительный блок, блок индикации, снабжено дополнительно блоком определения на- правления движения, вход которого подключен к выходу дешифратора (обращаем внимание экспертизы на то, что следующие несколько слов откорректированы авторами), выход блока определения длины маршрута соединен с входом блока контроля скорости, выход которого соединен с другим входом блока определения пройденного пути, и входом блока контроля исправности, выход которого соединен с третьим входом блока определения пройденного пути, выход которого подключен к входу блока программной скорости, выходом соединенного с одним входом блока индикации, другой вход которого соединен с выходом блока определения скорости.
Введение новых блоков позволяет определить расстояние перемещения от головы состава (независимо от места расположения локомотива в составе) до запрещающего сигнала и на основании этого определить допустимую скорость перемещения в любой точке пути.
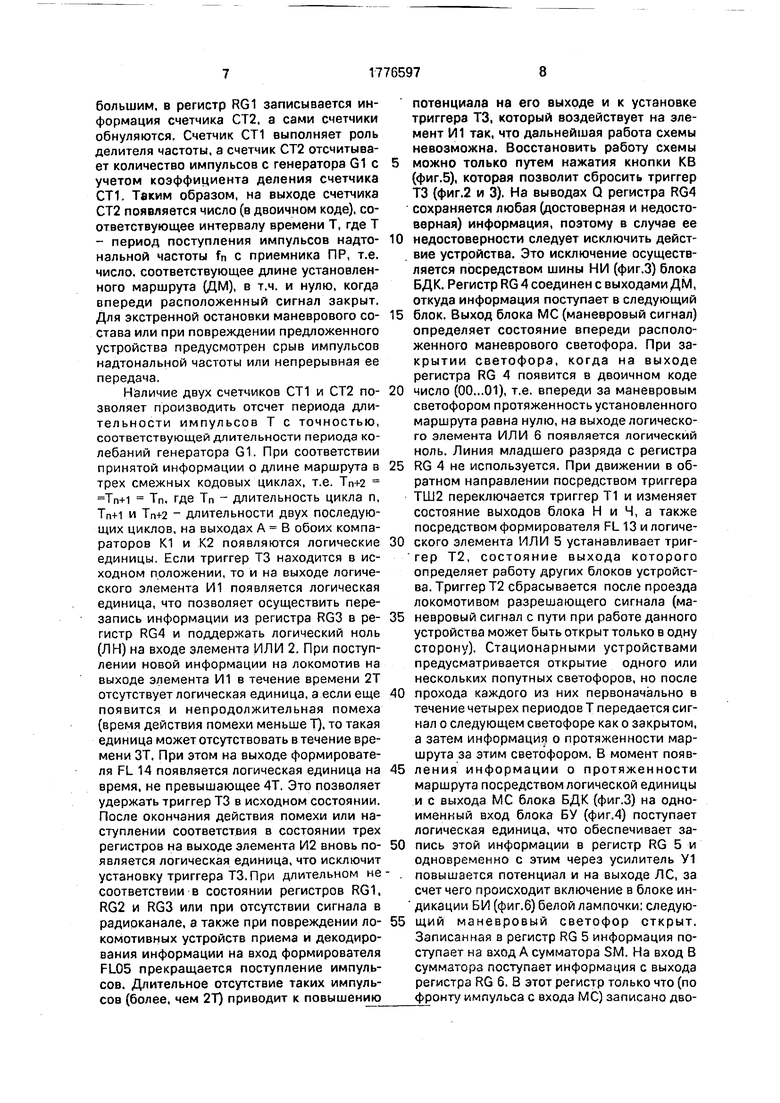
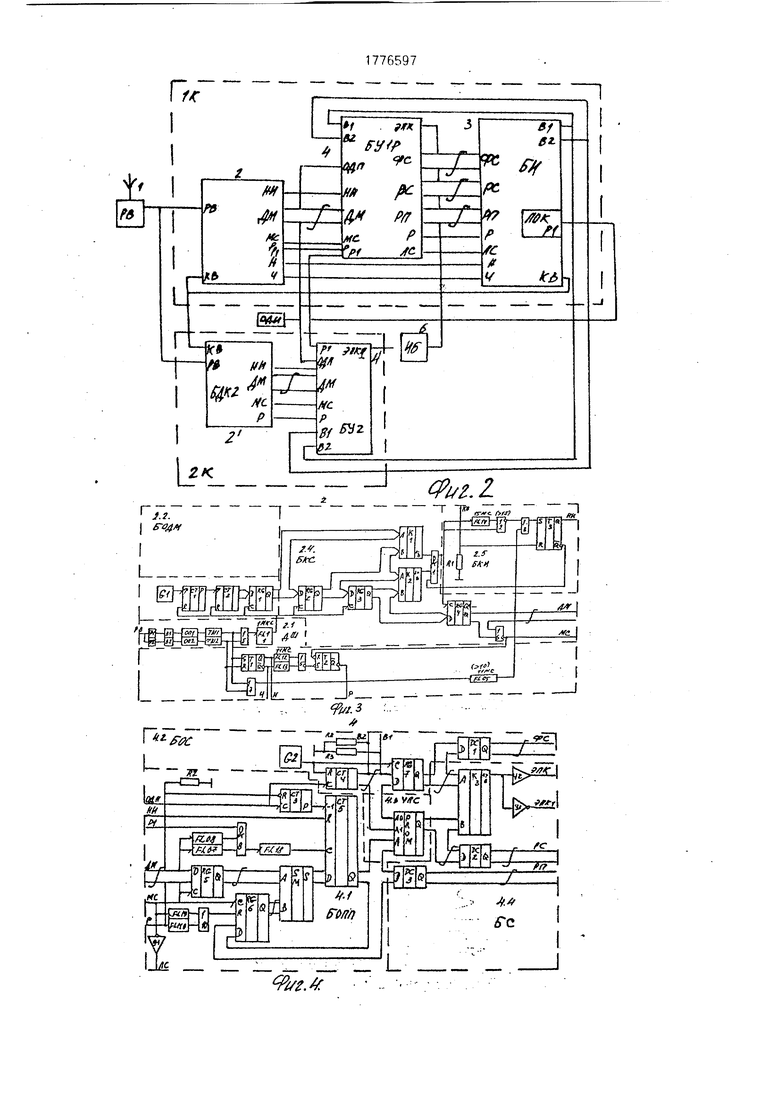
На фиг,1 представлена блок-схема устройства; на фиг.2 изображена схема соединения блоков; на фиг.3-5 показаны схемы блоков и соединения между элементами; на фиг 6 - фрагмент путевого развития станции и фазы перемещения состава по этому развитию; на фиг.7 - временная диаграмма работы устройства.
Устройство приема информации по длине пути (фиг.1) содержит приемник (ПР) 1 выход которого через дешифратор (ДШ) 2.1 соединен с входом блока определения направления движения (БОНД) 2.3 и входом блока определения длины маршрута (БОДМ) 2.2, к выходу которого через блок контроля исправности (БКИ) 2.5.присоединен блок определения пройденного пути (БОПП)41, второй вход которого соединен с выходом осевого датчика и импульсов (ОДИ) 5 и входом блока определения скорости (БОС) 4.2, выход которого соединен с входом блока сравнения скорости (БС) 4.4 и входом блока индикации (БИ) 3, ко второму входу которого подсоединен один из выходов блока программной скорости (БПС) 4.3, а второй к блоку сравнения скорости (БС) 4.4, выход которого соединен с исполнительным блоком (1/1Б) 6. Второй выход блока индикации 3 соединен со вторым входом блока программной скорости 4.3. Все узлы, первая цифра номера которых 2,обьедине- ны в блок декодера 2, а узлы с цифрой 4 - в блок управления 4. Ниже приводится подробное описание действия устройства. Напольные маневровые сигналы не передают информации о длине маршрута, не всегда имеют достаточную видимость и не позволяют автоматизировать процесс управления и регулирования скорости маневровых передвижений.
Предложенное устройство позволяет исключить упомянутые недостатки, оно содержит стационарные (в настоящем не рассматривается) и локомотивные устройства. Стационарные устройства располагаются на посту электрической централизации и передают радиосигнал о длине маршрута. Этот сигнал передается на несущей частоте маневровой радиостанции с помощью амплитудной манипуляции надтональной частотой. Период импульсов этой частоты определяет длину маршрута. Сигнал о длине маршрута передается с момента открытия светофора до вступления за него маневрового состава. Затем по этому же каналу (после прохода головой состава открытого светофора) поступает сигнал о проследовании этого светофора. С открытием следующего светофора передается новая информация о длине маршрута за ним. Для передвижения в обратном направлении на локомотив передается сигнал аналогично упомянутому, но с использованием другой надтональной частоты. Принимаемый (фиг.2) сигнал поступает в блок декодера (БД) 2, который расшифровывает его и передает информацию в блок управления (БУ) 4 о непрерывности радиосигнала и исправности устройства приема (выход НИ декодера), длине установленного маршрута за сигналом (выходы ДМ), состоянии маневрового светофора в направлении передвижения маневрового состава (выход МС), реверсирования (выход Р), а также информацию в блок индикации 3 о направлении движения (выходы Н, Ч). Блок управления, кроме того, получает сигналы с осевого датчика импульсов (ОДИ) и информацию о весе состава с БИ (выходы В1, В2). БУ сравнивает расчетную скорость с фактической и управляет электропневматическим клапаном, кроме того этот блок передает информацию о фактической и расчетной скорости, расчетной скорости,расчетном пути, реверсе и состоянии напольного светофора на пульт- табло. С БИ в БУ поступает информация о весе маневрового состава, а в БД К о нажатии кнопки восстановления (ВК). Эта кнопкапозволяетвосстановитьработоспособность устройств после сбоя. Однако несвоевременное нажатие кнопки, может вызвать опасную ситуацию, поэтому для контроля за нажатием предусмотрен счетчик нажатий. Вес состава определяет машинист на глазок. Предусмотрено четыре градации веса состава: очень легкий (одиночный локомотив), легкий, средний и тяжелый. Если машинист затрудняется выбрать ту или иную категорию, то он должен задать более тяжелую. Значение весз задается переключателем (ПВ, см. фиг.5), который имеет четыре фиксированных положения. Как видно из фиг.2, предусмотрены два комплекта устройств. В первый комплект (1 К) входят блоки ДКТ, БУ 1 и БИ, во второй - ДК2 и БУ2. Приемник ПР
и датчик пути ОДИ предусматривается по одному на локомотив. При превышении допустимой скорости или повреждении одного из устройств выключается ЭПК (ИБ) и происходит остановка состава. Предложен0 ные устройства могут быь дополнены блоком тестового контроля (на фиг.2 не показаны). Содержимое блоков БДК, БУ и блоки индукции БИ показано соответственно .З, 4, 5. На фиг.6 и 7 показаны
5 фрагмент путевого развития станции с фазами расположения маневрового состава (1Ф-5Ф) и временная диаграмма.
Действие схемы происходит следующим образом.
0 При нахождении маневрового состава на путевом участке 1П (фиг.6) при закрытом маневровом сигнале М1 (1Ф) по радиоканалу поступает несущая частота модулирования надтональной частотой (31 кГц по
5 аналогии с частотой генератора САУТ). Полезный сигнал определяется расстоянием от открытого впереди расположенного маневрового (совмещенного) светофора до следующего, состояние которого для коди0 рования сигнала значения не имеет. Чем больше длина установленного маршрута, тем больше период следования импульсов надтональной частоты. При закрытом светофоре этот период минимальный и составля5 ет 20ТНТ, где Тнт Тим + Тин ; Тим 10 Тнт; Тин: 10 Тнт, Тнт период колебания надтональной частоты, Тим и Тин - соответственно импульс и интервал периода Тнт. С приемника на вход РВ блока БДКТ (здесь и далее будет
0 рассматриваться действие первого комплекта 1УК устройства, работа второго комплекта 2К аналогична), поступает амплитудно-манипулировзнный сигнал частотой fi, который пропускается фильтром
5 Ф1 (фиг.З). Затем этот сигнал преобразуется выпрямителем в импульсы постоянного тока (выпрямитель содержит мостовую схему, к выходу которой подключен сглаживающий конденсатор) и поступает через оптопару на
0 вход триггера Шмидта ТШ1. С выхода триггера сигнал прямоугольной формы через элемент ИЛИ поступает на вход формирователя логической единицы по фронту входного сигнала FL1, выход которого
5 подсоединен к входам сброса счетчиков СТ1 и СТ2, а также к синхровходам С регистров RG1i, RG22 и RG3. С появлением логической единицы (ЛЕ) на перечисленных входах информация в регистрах перемещается из регистра с меньшим номером в регистр с
большим, в регистр RG1 записывается информация счетчика СТ2, а сами счетчики обнуляются. Счетчик СТ1 выполняет роль делителя частоты, а счетчик СТ2 отсчитывает количество импульсов с генератора G1 с учетом коэффициента деления счетчика СТ1, Таким образом, на выходе счетчика СТ2 появляется число (в двоичном коде), соответствующее интервалу времени Т, где Т - период поступления импульсов надто- нальной частоты fn с приемника ПР, т.е. число, соответствующее длине установленного маршрута (ДМ), в т.ч. и нулю, когда впереди расположенный сигнал закрыт. Для экстренной остановки маневрового состава или при повреждении предложенного устройства предусмотрен срыв импульсов надтональной частоты или непрерывная ее передача.
Наличие двух счетчиков СТ1 и СТ2 позволяет производить отсчет периода длительности импульсов Т с точностью, соответствующей длительности периода колебаний генератора G1. При соответствии принятой информации о длине маршрута в трех смежных кодовых циклах, т.е. Тп+2 - Тп+1 Тп. где Tn длительность цикла п, Тп+1 и Тп+2 - длительности двух последующих циклов, на выходах А В обоих компараторов К1 и К2 появляются логические единицы. Если триггер ТЗ находится в исходном положении, то и на выходе логического элемента И1 появляется логическая единица, что позволяет осуществить перезапись информации из регистра RG3 в регистр RG4 и поддержать логический ноль (ЛН) на входе элемента ИЛИ 2. При поступлении новой информации на локомотив на выходе элемента И1 в течение времени 2Т отсутствует логическая единица, а если еще появится и непродолжительная помеха (время действия помехи меньше Т), то такая единица может отсутствовать в течение времени ЗТ. При этом на выходе формирователя FL 14 появляется логическая единица на время, не превышающее 4Т. Это позволяет удержать триггер ТЗ в исходном состоянии. После окончания действия помехи или наступлении соответствия в состоянии трех регистров на выходе элемента И2 вновь появляется логическая единица, что исключит установку триггера ТЗ. При длительном не соответствии в состоянии регистров RG1, RG2 и RG3 или при отсутствии сигнала в радиоканале, а также при повреждении локомотивных устройств приема и декодирования информации на вход формирователя FL05 прекращается поступление импульсов. Длительное отсутствие таких импульсов (более, чем 27) приводит к повышению
потенциала на его выходе и к установке триггера ТЗ, который воздействует на элемент И1 так, что дальнейшая работа схемы невозможна. Восстановить работу схемы
5 можно только путем нажатия кнопки KB (фиг.5), которая позволит сбросить триггер ТЗ (фиг.2 и 3). На выводах Q регистра RG4 сохраняется любая (достоверная и недостоверная) информация, поэтому в случае ее
0 недостоверности следует исключить действие устройства. Это исключение осуществляется посредством шины НИ (фиг.З) блока БДК. Регистр RG 4 соединен с выходами ДМ, откуда информация поступает в следующий
5 блок. Выход блока МС (маневровый сигнал) определяет состояние впереди расположенного маневрового светофора. При закрытии светофора, когда на выходе регистра RG 4 появится в двоичном коде
0 число (00...01), т.е. впереди за маневровым светофором протяженность установленного маршрута равна нулю, на выходе логического элемента ИЛИ 6 появляется логический ноль. Линия младшего разряда с регистра
5 RG 4 не используется. При движении в обратном направлении посредством триггера ТШ2 переключается триггер Т1 и изменяет состояние выходов блока Н и Ч, а также посредством формирователя FL 13 и логиче0 ского элемента ИЛИ 5 устанавливает триг- rep T2, состояние выхода которого определяет работу других блоков устройства. Триггер Т2 сбрасывается после проезда локомотивом разрешающего сигнала (ма5 невровый сигнал с пути при работе данного устройства может быть открыт только в одну сторону). Стационарными устройствами предусматривается открытие одного или нескольких попутных светофоров, но после
0 прохода каждого из них первоначально в течение четырех периодов Т передается сигнал о следующем светофоре как о закрытом, а затем информация о протяженности маршрута за этим светофором. В момент появ5 ления информации о протяженности маршрута посредством логической единицы и с выхода МС блока БДК (фиг.З) на одноименный вход блока БУ (фиг.4) поступает логическая единица, что обеспечивает за0 пись этой информации в регистр RG 5 и одновременно с этим через усилитель У1
. повышается потенциал и на выходе ЛС, за
счет чего происходит включение в блоке ин дикации БЙ (фиг.б) белой лампочки: следую5 щий маневровый светофор открыт. Записанная в регистр RG 5 информация поступает на вход А сумматора SM. На вход В сумматора поступает информация с выхода регистра RG 6. В этот регистр только что (по фронту импульса с входа МС) записано двоичное число, характеризующее длину маршрута до первого попутного светофора. Поэтому на выходе сумматора появляется значение длины маршрута от локомотива до второго попутного маневрового светофора. Посредством формирователей FL06 и FL 18 и элемента И 9 с задержкой, которую определяет формирователь FL06 на время, которое определяет формирователь FL 18, счетчик 5 переводится в режим предварительной установки (старая информация заменяется новой). Время задержки формирователя FL 06 (FL 07) позволяет осуществить предварительную (параллельную) установку счетчика СТ4 после истечения времени переключений регистров RG 5 и RG 6, а также сумматора SM. Движение состава сопровождается вычитанием из числа, записанного в счетчике СТ5, проходимого пути посредством осевого датчика импульса ОДИ (фиг.2 и 4). Этот же датчик совместно с генератором G 2, счетчиком СТ 4 и регистром RG 7 позволяет определить фактическую, скорость движения состава, которая пропорциональна количеству импульсов с датчика ОДП в единицу времени, интервал времени определяется генератором G 2, например, частота генератора fr2 1 Гц. При этом для определения с достаточной точностью малых скоростей движения (до 1 км/ч) необходимо при каждом обороте колесной пары получить с датчика ОДП до 50 импульсов. Следует отметить, что соотношение между двоичным числом на выходе сумматора и расстоянием до закрытого сигнала составляет 1:10 м, т.е. на каждую единицу младшего разряда выхода сумматора приходится 10м. Необходимо привести в соответствие информацию, поступившую по входу - 1 м и входам D счетчика СТ5. Для этого между входом ОДП блока управления и входом -1 счетчика СТ5 должен быть предусмотрен делитель частоты (коэффициент деления 1:150). Выход счетчика СТ5 через дешифратор D C3 соединен с индикатором длины маршрута НШ (фиг.4, 2, 5) и регистром RG 6 и программируемым постоянным запоминающим устройством (ППЗУ)Р ROM. К ППЗУ (входы АО и А1) поступает информация о весе поезда. Ячейки запоминающего устройства содержат информацию о допустимой скорости с учетом расстояния до закрытого сигнала и веса состава. Эта информация (расчетная скорость) через дешифратор D C2 поступает на индикатор HLCP (фиг.4, 2, 5) и компаратор КЗ, на второй вход которого поступает информация с регистра RG7 о фактической скорости, она же поступает через дешифратор DC1 на индикатор HLCP (фиг.4, 2, 5). Компаратор КЗ
сравнивает расчетную и фактическую скорости и при превышении расчетной над факти- ческой скоростью поддерживает электропневматический клапан (ЭПК) в рабочем состоянии. Два усилителя У1 и У2 в блоке БУ позволяют использовать этот блок для первого и второго комплекта устройства (фиг.2).
При проезде разрешающего сигнала ло0 комотивные устройства начинают получать информацию о закрытом впереди расположенном сигнале (независимо от его фактического состояния). При этом появляется логический ноль во всех разрядах на выхо5 дах Q регистра RG 4 и выходе логического элемента ИЛИ 6. Элемент ИЛИ 6 имеет столько входов, сколько задействовано выходов в регистре RG 4. Понижение потенциала на шине МС (фиг.4 и 3) не изменяет
0 состояние триггеров регистров RG 5 и RG 6, где хранятся соответственно значение расстояния от сигнала, который в настоящий момент проходит голова маневрового состава, до следующего сигнала и расстояние до
5 того же светофора от локомотива в момент открытия предыдущего светофора. Так как на входе формирователя RL 19 понижается потенциал, то на его выходе кратковременно повышается, что обеспечивает обнуле0 ние регистра RG 6. С этого момента на выходе сумматора SM появляется значение, соответствующее расстоянию между двумя светофорами (то, что находится в RG 5). Такая коррекция необходима на тот случай,
5 когда при движении состава наблюдается юз и пробуксовывание колесных пар, или фактический диаметр колесной пары не вполне соответствовал тому, который был учтен при первоначальной отстройке. Такая
0 отстройка выполняется в датчике ОДП, который кроме оптопары с открытым оптическим каналом и диском, связанным с колесной парой, содержит корректирующее устройство, позволяющее учесть диаметр
5 колесной пары (датчик в настоящей работе не приводится). Таким образом, при проезде разрешающего маневрового светофора уточняется длина маршрута.
При открытии светофора обратного на0 правления движения в блоке индикации БИ (фиг.5) появляется соответствующая информация посредством индикаторов HLB (вперед), HLH (назад). Однако, на табло индикаторами HLCP, НШ сохраняется
5 прежняя информация. В ячейке HLP появляется информация о необходимости реверса. Новая информация не может быть передана в счэтчик СТ5, т.к. на верхний вход логического элемента И 8 не поступает логическая единица из-за несоответствия позиции рукоятки реверс РВ (фиг.5) и потенциалов на шинах Н и Ч. После перевода рукоятки РВ в новое положение повышается потенциал на входе Р1 блока БУ (фиг.4), а следовательно и на входе С счетчика СТ5 через формиро- ватель FL 18. В счетчик-СТ5 поступает информация с регистра RG 5 через сумматор SM.
Следует отметить, что регистр RG 6 обнулен посредством понижения потенциала на входе Р блока БУ и импульсов с формирователя FL 110 через элемент ИЛИ 10. На индикаторе HLfl (фиг.4) в отличие от пред - идущего случая появляется расстояние не от маневрового состава до закрытого свето- фора, а расстояние от открытого до закрытого светофора. При этом движение состава на открытый сигнал не вызывает изменений на индикаторе НШ и HLCP. Такая ситуация сохраняется до вступления состава за от- крытый светофор, а затем устройства работают обычным образом, т.к. триггер Т2 сбрасывается и на выходе Р блока БДК вновь появляется логическая единица. При потере связи локомотива со стационарной радиостанцией триггер ТЗ (фиг.З) устанавливается посредством формирователя FL05 и логического элемента ИЛИ 3. При этом посредством выхода НИ и одноименного входа блока БУ (фиг.4) обнуляется счетчик СТ5 и индикатор HLCP, а электропневматический клапан выключается исключая возможность дальнейшего производства маневровых передвижений.
Работа предложенного устройства мо- жет осуществляться на станциях, оборудованных электрической централизацией, однако напольных маневровых сигналов может и не быть.
В качестве элементов схем использова- ны следующие ИМС: G - К155АГЗ, СТ - К155ИЕ7 , RG - К155ИР15 , FL - К155АГЗ, К155АЛЗ, Т- К555ТЛ2,564ТР2 , К-564ИП2,
SM - К155ИМЗ PROM - КР556РТ16, DC - К541ИД1, HL-АЛС324А , ОП-АОД01АА . Аналитические исследования заявляемого устройства приема информации о длине маршрута показали, что по сравнению с прототипом оно позволяет принимать, хранить и корректировать информацию о длине маршрута независимо от момента открытия светофора (можно обойтись и без светофора) и места нахождения маневрового локомотива в составе.
Формула изобретения Устройство для приема на локомотиве информации с пути, содержащее установленные на локомотиве блок определения длины маршрута, связанный входом с выходом дешифратора, соединенного входом с приёмником, блок контроля скорости, осевой датчик импульсов, выходом связанный с входами блока определения пройденного пути и блока определения скорости, блок программной скорости, подключенный входом к выходу блока определения пройденного пути, а выходом - к одному входу блока сравнения, соединенного другим входом с выходом блока определения скорости, ис: полнительный блок и блок индикации, отличаю щееся тем, что, с целью повышения достоверности, оно снабжено блоком контроля исправности, вход которого подключен к выходу дешифратора, а выход соединен с входом блока контроля скорости, выход которого соединен с другим входом блока определения пройденного пути и входом блока контроля исправности, выход которого соединен с третьим входом блока определения пройденного пути, выход которого подключен к входу блока программной скорости, выходом соединенного с одними входами блока индикации, другой вход которого соединен с выходом блока определения скорости.
9кг. Ј
Т.Шагова
9Ы.Составитель Е.Пономарева Техред М.Моргентал
к ф2КвЗ
i лю |
I-.i
Корректор Л.Гереши
| Устройство для автоматического управления торможением поезда | 1985 |
|
SU1255485A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
