внутри телескопической колонны и соединенный с выдвижной секцией, на которой закреплен блок, охваченный гибким органом, один конец которого закреплен на ос- новании, элемент крепления стрелы шарнирно соединенный со стрелой, ползун с направляющей, закрепленной с внешней стороны телескопической колонны, упор, шарнирно соединенный с ползуном, на котором закреплен другой конец гибкого органа. Новым в устройстве является то, что стрела выполнена телескопической, причем выдвигаемая часть ее задним конусом шарнирно соединена с телескопической колонной посредством упора и подвижного толкателя, а другой конец шарнирно соединен с копиром, установленным на телескопической колонне. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1981 |
|
SU958306A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 2012 |
|
RU2486128C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
Использование: изобретение относится к подъемно-транспортному машиностроению, а именно к стреловым кранам С телескопической башней, и может быть использовано как грузоподъемное устройство. Сущность изобретения: грузоподъемное устройство содержит стрелу, шарнирно закрепленную на выдвижной секции телескопической колонны, установленной на основании, гидроцилиндр, расположённый
Изобретение .относится к подъемно- транспортному машиностроению, а именно к стреловым кранам с телескопической башней и может быть использовано как грузоподъемное устройство.
Цель изобретения - расширение эксплуатационных возможностей при работе в стесненных условиях.
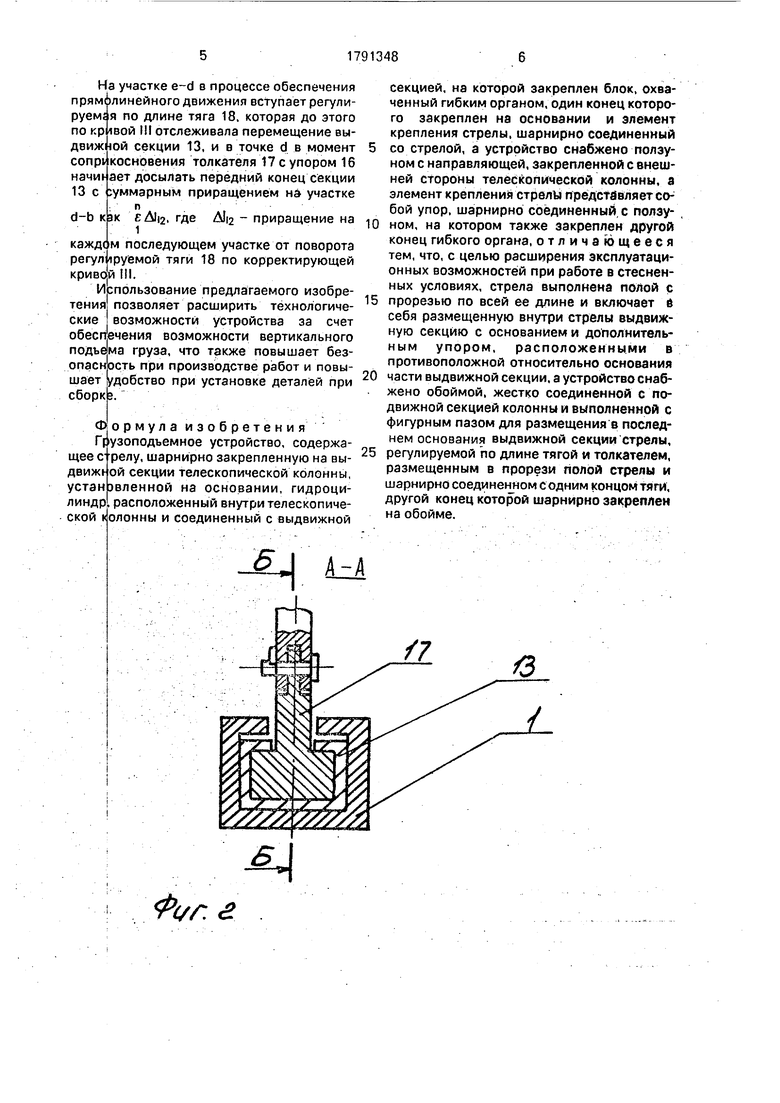
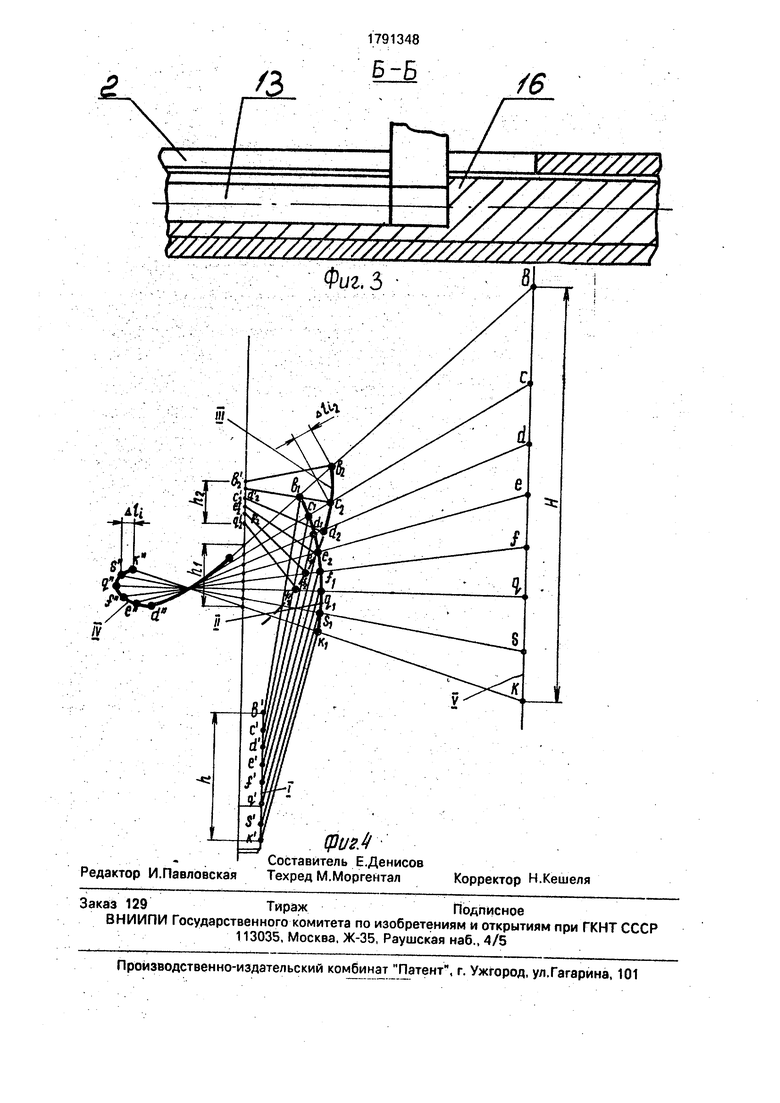
На фиг. 1 показано грузоподъемное устройство, общий вид, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - циклограмма для прямолинейного движения конца стрелы в пространстве.
Грузоподъемное устройство содержит полную стрелу 1с прорезью 2, шарнирно закрепленную на подвижной секции 3 телескопической колонны 4, установленной вертикально на основании 5, гидроцилиндр 6 с командоаппаратом 7, расположен внутри колонны 4 и соединен с подвижной секцией 3, на которой закреплен блок 8, охваченный гибким органом 9, концы которого закреплены на основании 5 и ползуне 10, сопряженным с направляющей 11, расположенной с внешней стороны колонны 4.
Элемент крепления стрелы представляет собой рычаг 12, шарнирно соединенный со стрелой 1 и ползуном 10, выдвижной секцией 13 покой стрелы 1, имеющей основание 14, размещенное в фигурном пазе 15 и упор 16 в противоположной ему части, толкатель 17 шарнирно связанный с регулируемой по длине тягой 18, шарнир, связывающий регулируемую по длине тягу 18с другим ее концом и фигурный паз 15 с размещенным в нем основанием 14 выдвижной секции 13 расположены в обойме 19 жестко связанной с подвижной секцией 3 колонны 4 и охватывающей полую стрелу 1, грузозахватным органом 20, установленным на переднем конце выдвижной секции 13 покой стрелы 1.
На фиг. 4 условно показаны: результирующая высота подъема к с учетом взаимных перемещений стрелы и регулируемой тяги, высота h перемещения колонны 3 (поршня цилиндра), высота hi перемещения
оси регулируемой тяги 18; Д и Ali2 - приращения; I - прямая ползуна 10; II - кривая рычага 12; III - корректирующая кривая регулируемой тяги 18; IV - корректирующая
кривая фигурного паза 15; V - оптимальное направление грузозахватного органа 20.
Грузоподъемное устройство работает следующим образом.
При работе гидроцилиндра б поднимается или опускается секция 3, вместе с ней поднимается или опускается стрела 1 и ползун 10 с рычагом 12, который поворачивает стрелу 1, при этом передний конец выдвижной секции 3 позволяет грузозахватному
органу 20 перемещаться только в необходимом направлении за счет перемещения секции 13 относительно стрелы 1 в соответствии с конфигурацией фигурного паза 15. Толкатель 17, шарнирно связанный с
регулируемой по длине тягой 18, свободно перемещается в прорези 2 стрелы 1 и в необходимый момент при выходе основания 14 в свободное пространство выдвижной секции 13 из фигурного паза 15 обоймы
19 толкатель 17 упирается в упор 16 и досылает передний конец выдвижной секции 13 с грузозахватным органом 20 в нужную точку пространства. Опускание груза производится в обратной последовательности.
На фиг. 4 представлена циклограмма работы грузоподъемного устройства при прямолинейном подъёме грузозахватного органа 20 на участке b-k фиг. 1 с промежуточными положениями; с, d, e, f, q, s.
При перемещении ползуна 10 относительно колонны 4 от точки к до Ь , рычаг 12 повернется по кривой II от положения ki до bi, причем на участке k-s приращение Л ±li будет определяться конфигурацией кривой
iv фигурного паза 15, воздействующего на основание 14 выдвижной секции 13 и определяющего прямолинейное вертикальное перемещение грузозахватного органа 20, а
п
на участке k-e как с Л (ц. где - приращение на каждом последующем участке.
На участке e-d в процессе обеспечения прямолинейного движения вступает регули- я по длине тяга 18. которая до этого
руем; по кр
шает сборк
вой 111 отслеживала перемещение выдвижной секции 13, и в точке d в момент conpt косновения толкателя 17 с упором 16 начикает досылать передний конец секции 13 с суммарным приращением нэ участке
d-b как Б Д1|2. где Д1|2 - приращение на
1
каждом последующем участке от поворота регул криво
Использование предлагаемого изобретения позволяет расширить технологические возможности устройства за счет обеспечения возможности вертикального подъема груза, что также повышает безопасность при производстве работ и повыруемой тяги 18 по корректирующей
удобство при установке деталей при
Формула изобретения Грузоподъемное устройство, содержащее с релу, шарнирно закрепленную на вы- движе ой секции телескопической колонны, устанэвленной на основании, гидроцилиндр, расположенный внутри телескопической колонны и соединенный с выдвижной
Фиг.г
0
5
0
5
секцией, на которой закреплен блок, охваченный гибким органом, один конец которого закреплен на основании и элемент крепления стрелы, шарнирно соединенный со стрелой, а устройство снабжено ползуном с направляющей, закрепленной с внешней стороны телескопической колонны, а элемент крепления стрелы представляет собой упор, шарнирно соединенный с ползуном, на котором также закреплен другой конец гибкого органа, отличающееся тем, что, с целью расширения эксплуатационных возможностей при работе в стесненных условиях, стрела выполнена полой с прорезью по всей ее длине и включает б себя размещенную внутри стрелы выдвижную секцию с основанием и дополнитель- ным упором, расположенными в противоположной относительно основания части выдвижной секции, а устройство снабжено обоймой, жестко соединенной с подвижной секцией колонны и выполненной с фигурным пазом для размещения в последнем основания выдвижной секции стрелы, регулируемой по длине тягой и толкателем, размещенным в прорези полой стрелы и шарнирно соединенном с одним концом тяги, другой конец которой шарнирно закреплен на обойме.
ГА
/ / / У У / / / 7 SS
г////////////////////////////////////////
Редактор И.Павловская
0М.4
Составитель Е.Денисов Техред М.Моргентал
Заказ 129Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
/ Х////////А
7 /7 / 7 V / X У S
//,7//7
Корректор Н.Кешеля
| ГРУЗОПОДЪЕМНЫЙ КРАН | 0 |
|
SU362780A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Грузоподъемное устройство | 1981 |
|
SU958306A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
