Изобретение относится к области химического машиностроения, а более конкрёт- нс - к устройствам для накопления и выдачи жидкого или газового продукта и точного его дсзирования.
Известен дозатор, содержащий корпус с нишами, входными и выходными каналами и камерой постоянного объема, разделен- нрй мембраной на две полости, первые и вУорые контактные элементы датчиков крайнего положения мембраны с выводами и блок управления и приема сигналов, причем в нишах корпуса установлены перёгбро|дш; - ; -; : .
Однако известно устройство недбста- тб|чнЬ надежно при длительном ресурсе, ифет невысокую точность замера, особенно при использовании мембраны с нуле- во й жесткостью и неуправляемой по объему перекладкой, осуществляемой при ни/зком давлении менее 10 мм вод. ст.
Целью изобретения является повышение точности и надежности контроля положения мембраны путем введения избирательной системы контроля по сферической поверхности мембраны в условиях нулевой ее жесткости и с неуправляемой по объему перекладкой..
Указанная цель достигается посредством того, что в каждом датчике крайнего положения мембраны первый контактный элемент выполнен в виде нескольких изолированных радиальных площадок с соответствующими электрическими выводами, установленных неподвижно между перегородками с внутренней стороны корпуса, второй контактный элемент выполнен в виде такого же числа упругих лепестков с зацепами, соединенными с кольцевой пружиной, причем лепестки коротко замкнуты с внешней стороны сферическим по- яском-перёмыякой, установленным на
(Л
С
XI
Ю СО N5 CJ 00
перегородке, направлены радиально и установлены d возможностью взаимодействия с соответствующими радиальными площадками, а выводы первых контактных элементов подключены к соответствующим входам 5 блока управления и приема сигналов, выполненного с возможностью определения числа замкнутых контактов,
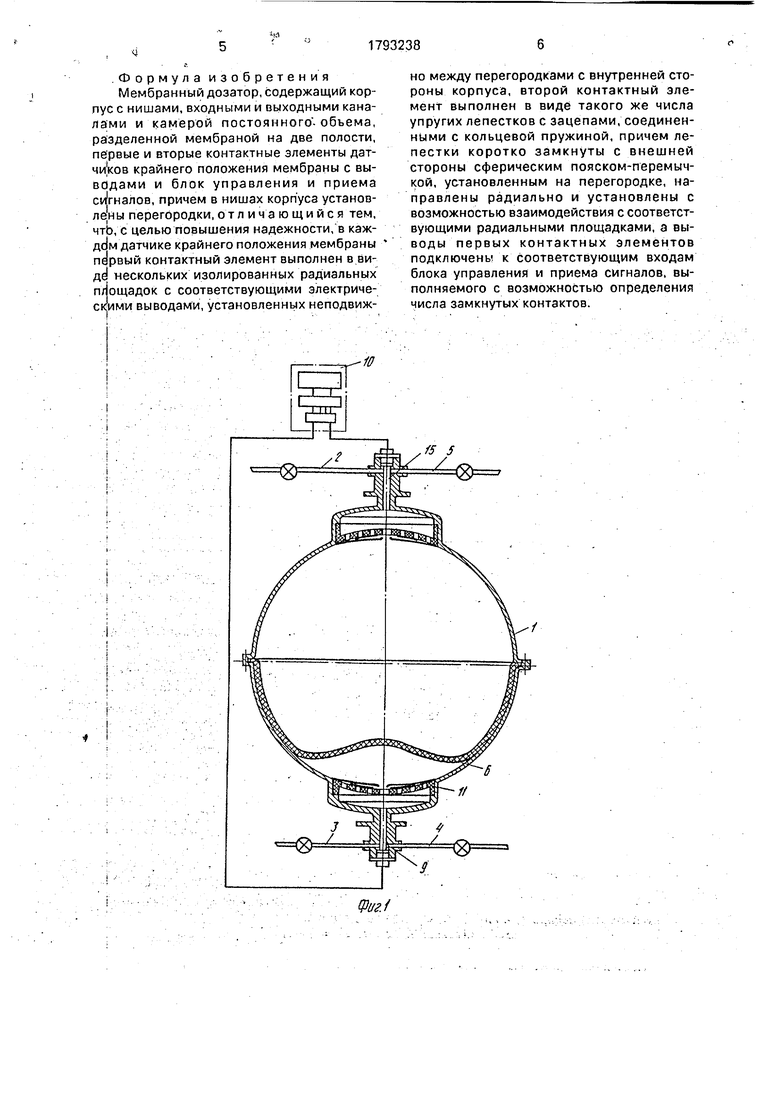
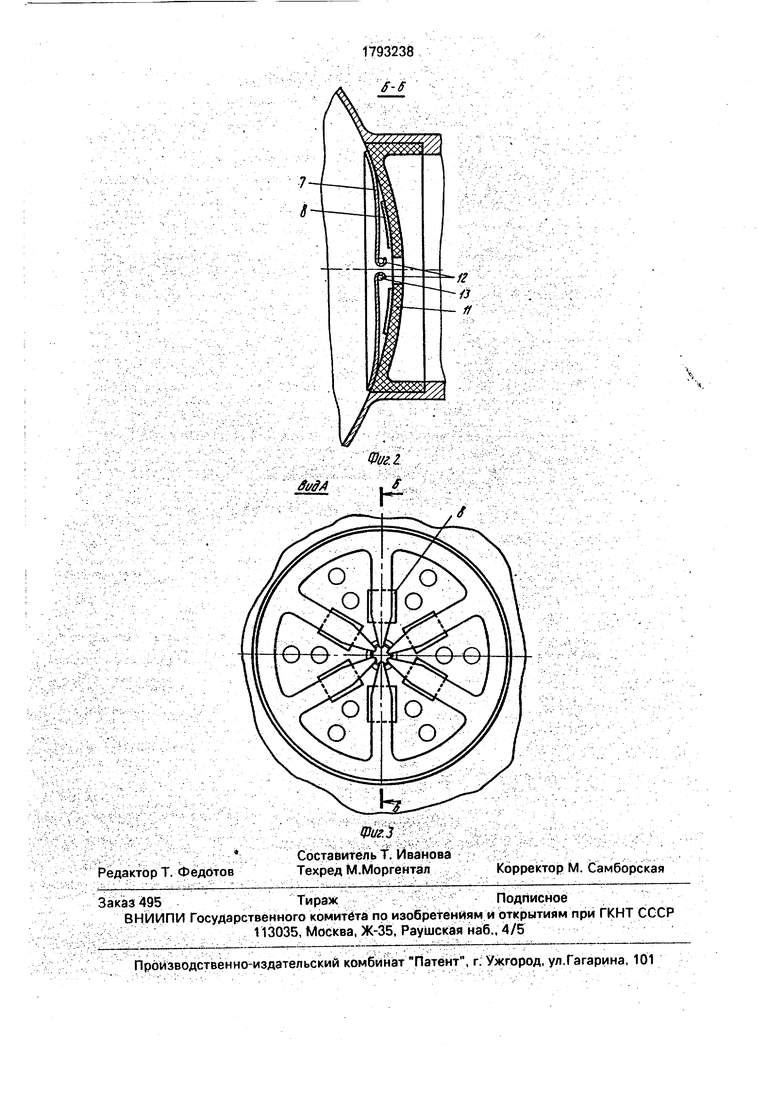
На фиг. 1 приведена конструктивная схема дозатора; на фиг, 2 и 3 - элементы 10 датчика.
Дозатор содержит корпус 1 с нишами, входными 2, 3 и выходными 4, 5 каналами и камерой постоянного объема, разделенной мембраной б на две полости, первые 7 и 15 вторые 0 контактные элементы датчиков крайнего положения мембраны 6 С выводами 9 и блок; управления и приема сигналов 10, причем в нишах корпуса 1 установлены перегородки 11. В каждом датчике крайнего 20 положения мембраны 6 первый контактный элемент выполнен в виде нескольких изо- лированны радиальных площадок с соответствующими электрическими выводами, установленных неподвижно между перего- 25 родками 11 с внутренней стороны корпуса
I, второй контактный элементе выполнен в виде такого же числа упругих лепестков с зацепами 12, соединенными с кольцевой пружиной 13 и коротко замкнутых с внеш- 30 ней стороны сферическим пояском - перемычкой 14, установлейным на перегородке
II, причем направлены радиально и уста- новлены с возможностью взаимодействия с соответствующими радикальными площад- 35 ками, а выводы первых 7 контактных элеi ментов подключены к соответствующим входам блока управления и приема сигналов 10, выполненного с возможностью определения числа замкнутых контактов.40
При функционировании устройства на- ; капливаемая среда (например, газ) по патрубку 15 пбступаёгв полость разделенную . : мембраной 6. По мере накопления среды мембрана 6 перекладывается и в крайнем 45
У положе нйм надавливает на.контакты датчика ее крайнего положения, который выдает сигнал на переключение соответствующих клапанов (на чертеже не показанных), после чего во вторую полость поступает газ суп- 50 равляющим давлением и мембрана б перекладывается в обратном направлений, вытесняя накопленный продукт из первой полости. При срабатывании датчика цикл накопления и сброса повторяется.55
При использовании накопителя для среды с очень малым давлением (менее 10 мм вод. ст.) мембрана выполняется с нулевой жесткостью, которая практически начинает перекладку до экваториальной плоскости при давлении з-5 мм вод. ст., а за экваториальной плоскостью при условии небольших расходов (например, до 7 см /мин) мембрана перекладывается самопроизвольно за счет собственных упругих сил, причем процесс перекладки хаотичен. Поэтому для определения крайнего положения такой мембраны датчики содержат легко упругие лепестки контактов 7, расположенные радиально по сферической поверхности корпуса датчика и прикрепленных жестко с одной стороны к перемычке 10. В центральной части лепестки упруго соединены между собой кольцевой пружиной 13. Контакты 8 установлены под лепестками. При подходе мембраны 6 в крайнее положение она какой-либо крайней частью своей поверхно- сти (т.к. перекладка по форме хаотична) нажимает на лепестки 9, которые начинают отжиматься. ч:..
Так как лепестки упруго связаны между собой пружиной 13, то одновременно начинают отжиматься и остальные лепестки всей группы контактов 7, что в конечном положении обеспечивает для мембраны 6 требуемую сферическую опорную поверхность. Так как каждый контакт 8 взаимосвязан с другими лепестками, то происходит практически одновременное срабатывание всех контактов. .
Каждый контакт групп 7 и 8 электрически связан с блоком управления и приема сигналов 10, в состав которого входит избирательная система приема сигналов 2 из 3, согласно которой командный сигнал на переключение клапанов выдается в блок управления и приема сигналов 10 только при одновременном срабатывании HQ менее 2-х контактных пар, что исключает прохождение ложного сигнала, например, при случайном срабатывании какой-либо контактной пары в условиях виброударного воздействия на дозатор....-..
Предлагаемый до.затор в отличие от известных обеспечивает высокую чувствительность и точность замеряемого количества продукта в условиях низких давлений и при воздействии любых вибродинамических перегрузок, возникающих при эксплуатации дозатора.
. Ф о рмул а и зо бретен и я Мембранный дозатор, содержащий корпус с нишами, входными и выходными кана- лами и камерой постоянного -объема, разделенной мембраной на две полости, первые и вторые контактные элементы дат- чи ков крайнего положения мембраны с выводами и блок управления и приема сигналов, причем в нишах корпуса установлены перегородки, отличающийся тем, что, с целью повышения надежности, в каж- flcta датчике крайнего положения мембраны первый контактный элемент выполнен в виде нескольких изолированных радиальных площадок с соответствующими электрическими выводами, установленных неподвижно между перегородками с внутренней стороны корпуса, второй контактный элемент выполнен в виде такого же числа упругих лепестков с зацепами, соединенными с кольцевой пружиной, причем лепестки коротко замкнуты с внешней стороны сферическим пояском-перемычкой, установленным на перегородке, направлены радиально и установлены с возможностью взаимодействия с соответствующими радиальными площадками, а выводы первых контактных элементов подключены к соответствующим входам блока управления и приема сигналов, выполняемого с возможностью определения числа замкнутых контактов.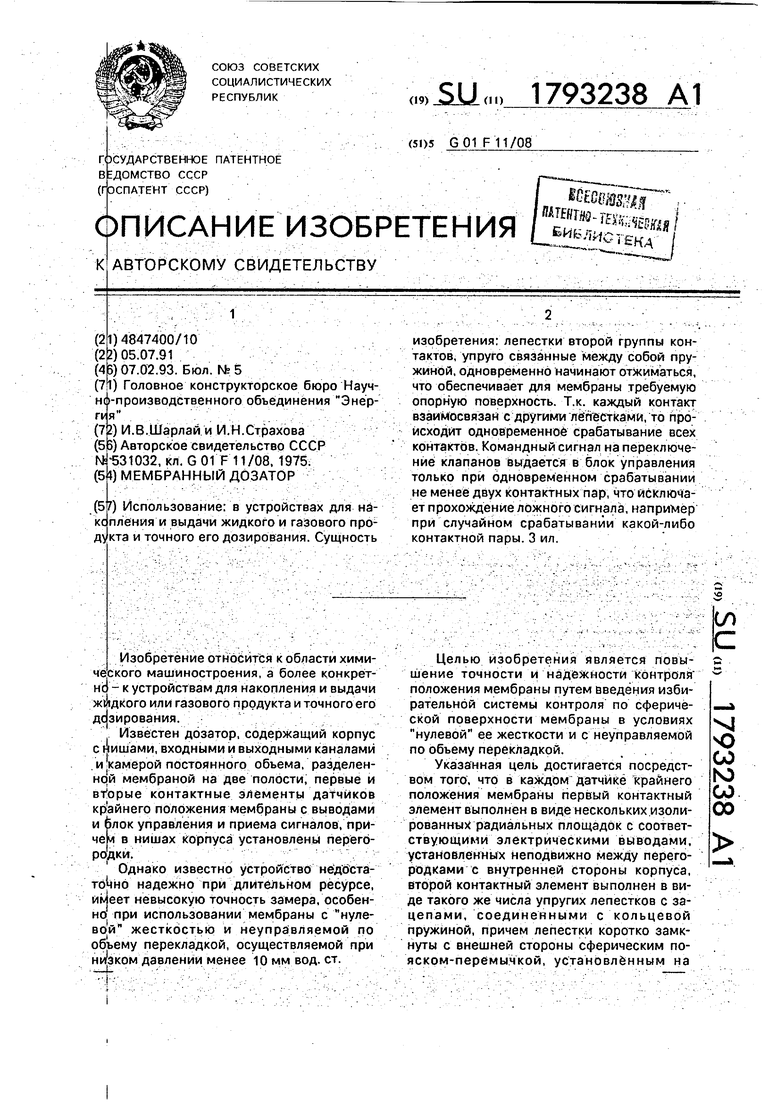
| название | год | авторы | номер документа |
|---|---|---|---|
| Мембранный дозатор | 1990 |
|
SU1778536A1 |
| Электрогидравлическая система | 1989 |
|
SU1779803A1 |
| Мембранный дозатор | 1990 |
|
SU1779943A1 |
| Способ юстировки многоконтактного датчика крайнего положения мембраны дозатора | 1990 |
|
SU1779942A1 |
| КОМПРЕССОР С ПОДВИЖНОЙ ГИБКОЙ МЕМБРАНОЙ | 2017 |
|
RU2669068C1 |
| Способ проверки герметичности изделий из эластичного материала | 1990 |
|
SU1793293A1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2360704C1 |
| Запорно-пусковое устройство быстродействующей автоматической пожаротушащей системы | 2020 |
|
RU2754439C1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
| Быстродействующая автоматическая пожаротушащая система | 2020 |
|
RU2754440C1 |