&
Ј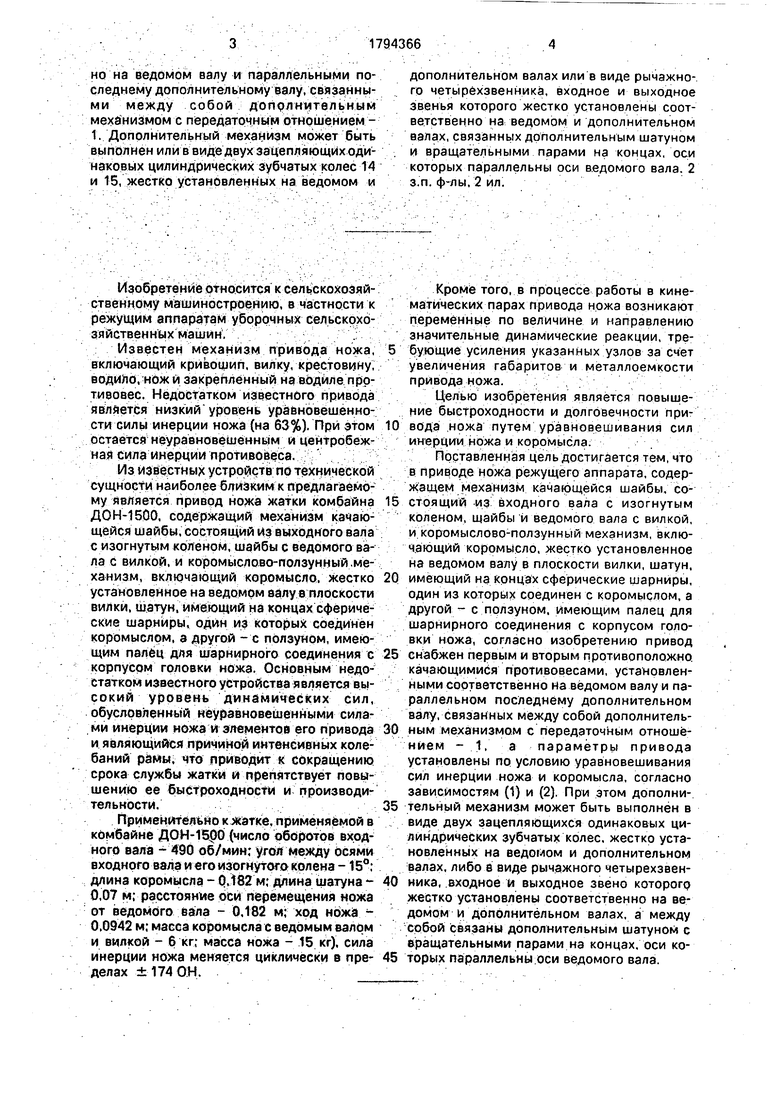
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| Привод ножа режущего аппарата | 1987 |
|
SU1496681A1 |
| Механизм режущего инструмента | 1989 |
|
SU1733765A1 |
| Устройство для уравновешивания ползуна кривошипного пресса | 1976 |
|
SU614972A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ДЛЯ ПОРШНЕВОЙ МАШИНЫ | 2017 |
|
RU2658209C1 |
| Привод перемещения подвижных масс стана холодной прокатки труб | 1986 |
|
SU1412823A1 |
| ЮЕСОЮЗНАЯ I | 1973 |
|
SU372764A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ДЛЯ ПОРШНЕВОЙ МАШИНЫ | 2019 |
|
RU2709336C1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
Изобретение предназначено для использования в аппаратах уборочных сель-W скохозяйственных машин и позволяет повысить быстроходность и долговечность привода путем уравновешивания сил инерции ножа и коромысла. Привод ножа содержит механизм качающейся шайбы,состоящий из входного вала 1 с изогнутым коленом 2, шайбы 3 и ведомого вала 4 с вилкой 5 и коромыс- лово-ползунный механизм, включающий коромысло 6, жестко установленное на ведомом валу в плоскости вилки, шатун 7, имеющий на концах сферические шарниры 8. один из которых соединен с коромыслом, а другой - с ползуном. Привод снабжен двумя противоположно качающимися противовесами 11 и 12, установленными соответствен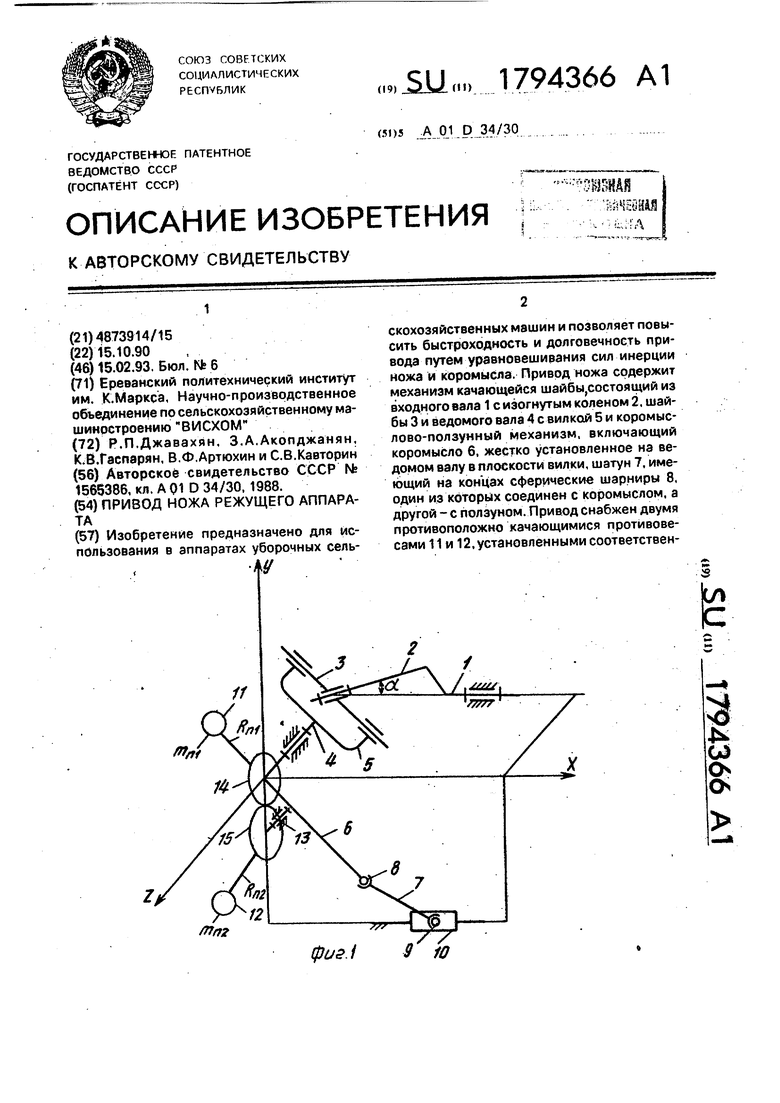
Qus.l 9 to
но на ведомом валу и параллельными последнему дополнительному еалу, связанными между собой дополнительным механизмом с передаточным отношением - 1. Дополнительн ый механизм может быть выполнен или в виде двух зацепляющих одинаковых цилиндрических зубчатых колес 14 и 15, жестко установленных на ведомом и
Изобретение относится к сельскохозяйственному машиностроению, в частности к режущим аппаратам уборочных сельскохозяйственных машин.J
Известен механизм привода ножа, включающий кривошип, вилку; крестовину, водило, нож и закрепленный на водиле противовес. Недостатком известного привода является низкий уровень уравновешенности силы инерции ножа (на 63%). При этом остается неуравновешенным и центробежная сила инерции противойеса. i
Из йзйёстных устройств по технической сущности наиболее близким к предлагаемому является привод ножа жатки комбайна ДОН-1500, содержащий механизм качающейся шайбы, состоящий из выходного вала с изогнутым коленом, шайбы с ведомого вала с вилкой, и коромыслово-ползунный.механизм, включающий коромысло, жестко установленное на ведомом валу в плоскости вилки, шатун, имеющий на концах сферические шарниры, один из которых соединен коромыслом, а другой - с ползуном, имеющим палец для шарнирного соединения с корпусом головки ножа. Основным недостатком известного устройства является высокий уровень динамических сил, обусловленный неуравновешенными силами инерции ножа и элементов его привода и являющийся причиной интенсивных колебаний рамы, что приводит к сокращению срока службы жатки и препятствует повышению ее быстроходности и производительности.
Применительно к жатке, применяемой в комбайне ДОН-15 50 (число оборотов входного вала - 490 об/мин; угол между осями входного вала и его изогнутого колена -15°: длина коромысла - 0,182 м; длина шатуна - 0,07 м; расстояние оси перемещения ножа от ведомого вала - 0,182 м; ход ножа .-. 0,0942 м; масса коромысла с ведомым валом и вилкой - 6 кг; масса ножа - 15 кг), сила Инерции ножа меняется циклически в пределах ±174 ОН.
дополнительном валах или в виде рычажного четырёхзвенника, входное и выходное звенья которого жестко установлены соответственно на ведомом и дополнительном валах, связанных дополнительным шатуном и вращательными парами на концах, оси которых параллельны оси ведомого вала. 2 з.п. ф-лы, 2 ил.
Кроме того, в процессе работы в кинематических парах привода ножа возникают переменные по величине и направлению значительные динамические реакции, требующие усиления указанных узлов за Счет увеличения габаритов и металлоемкости привода ножа.
Целью изобретения является повышение быстроходности и долговечности привода ,ножа путем уравновешивания сил инерции ножа и коромысла.
Поставленная цель достигается тем, что в приводе ножа режущего аппарата, содержащем механизм качающейся шайбы, состоящий из: входного вала с изогнутым коленом, шайбы и ведомого вала с вилкой, и.коромыслово-ползунный механизм, включающий коромысло, жестко установленное на ведомом валу в плоскости вилки, шатун,
имеющий нз концах сферические шарниры, один из которых соединен с коромыслом, а другой - с ползуном, имеющим палец для шарнирного соединения с корпусом головки ножа, согласно изобретению привод
снабжен первым и вторым противоположно, качающимися противовесами, установленными соответственно на ведомом валуи параллельном последнему дополнительном валу, связанных между собой дололнительным механизмом с передаточным отношением - 1, а параметры привода установлены по условию уравновешивания сил инерции ножа и коромысла, согласно зависимостям (1) и (2). При этом дополнительный механизм может быть выполнен в виде двух зацепляющихся одинаковых цилиндрических зубчатых колес, жестко установленных на ведомом и дополнительном валах, либо а виде рычажного четырехзвенника, входное и выходное звено которого жестко установлены соответственно на ведомом и дополнительном валах, а между собой связаны дополнительным шатуном с вращательными парами на концах/оси которых параллельны оси ведомого вала.
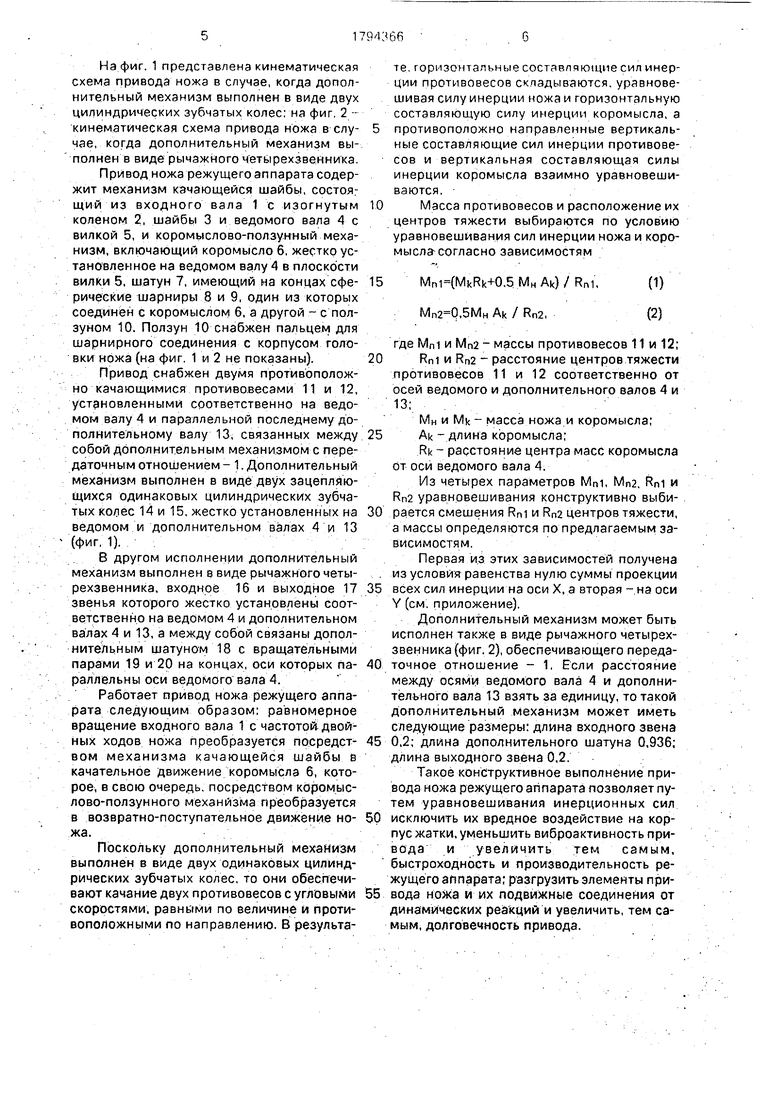
На фиг, 1 представлена кинематическая схема привода ножа в случае, когда дополнительный механизм выполнен в виде двух цилиндрических зубчатых колее: на фиг. 2 -- кинематическая схема привода ножа в случае, когда дополнительный механизм выполнен в виде рычажного четырехзвенника.
Привод ножа режущего аппарата содержит механизм качающейся шайбы, состоя: щий из входного вала 1 с изогнутым коленом 2, шайбы 3 и ведомого вала 4 с вилкой 5, и коромыслово-ползунный механизм, включающий коромысло 6, жестко установленное на ведомом валу 4 в плоскости вилки 5, шатун 7, имеющий на концах сферические шарниры 8 и 9, один из которых соединён с коромыслом 6, а другой - с ползуном 10. Ползун 10 снабжен пальцем для шарнирного соединения с корпусом головки ножа (на фиг. 1 и 2 не показаны).
Привод снабжен двумя противоположно качающимися противовесами 11 и 12, установленными соответственно на ведомом валу 4 и параллельной последнему дополнительному валу 13, связанных между собой дополнительным механизмом с передаточным отношением - 1. Дополнительный механизм выполнен в виде двух зацепляющихся одинаковых цилиндрических зубчатых колес 14 и 15, жестко установленных на ведомом и дополнительном валах 4 и 13 (фиг, 1).
8 другом исполнении дополнительный механизм выполнен в виде рычажного четырехзвенника, входное 16 и выходное 17 звенья которого жестко установлены соответственно на ведомом 4 и дополнительном валах 4 и 13, а между собой связаны дополнительным шатуном 18 с вращательными парами 19 и 20 на концах, оси которых параллельны оси ведомого вала 4.
Работает привод ножа режущего аппарата следующим образом: равномерное вращение входного вала 1 с частотой двойных ходов ножа преобразуется посредством механизма качающейся шайбы в качательное движение коромысла 6, которое, в свою очередь, посредством кдромыс- лово-ползунного механизма преобразуется в возвратно-поступательное движение ножа.
Поскольку дополнительный механизм выполнен в виде двух одинаковых цилиндрических зубчатых колес, то они обеспечивают качание двух противовесов с угловыми скоростями, равными по величине и противоположными по направлению. В результате, горизонтальные составляющие сил инерции противовесов складываются, уравновешивая силу инерции ножа и горизонтальную составляющую силу инерции коромысла, а
противоположно направленные вертикальные составляющие сил инерции противовесов и вертикальная составляющая силы инерции коромысла взаимно уравновешиваются.
Масса противовесов и расположение их центров тяжести выбираются по условию уравновешивания сил инерции ножа и коромысла согласно зависимостям
Mni(MkRk+0,5MHAk)/Rni,(1) ,5MH Ak / Rn2, (2)
где МП1 и Мп2 массы противовесов 11 и 12;
Rni и Rn2 - расстояние центров тяжести
противовесов 11 и 12 соответственно от
осей ведомого и дополнительного валов 4 и
13v ..
Мн и Mk - масса ножа и коромысла;
Ak - длина коромысла;
Rk - расстояние центра масс коромысла от оси ведомого вала 4.
Из четырех параметров МП1, МП2. Rni и Rn2 уравновешивания конструктивно выбирается смешения Rni и Rn2 центров тяжести, а массы определяются по предлагаемым зависимостям.
Первая из. этих зависимостей получена из условия равенства нулю суммы проекции
всех сил инерции на оси X, а вторая -на оси Y (см. приложение).
Дополнительный механизм может быть исполнен также в виде рычажного четырехзвенника (фиг. 2), обеспечивающего передаточное отношение - 1, Если расстояние между осями ведомого вала 4 и дополнительного вала 13 взять за единицу, то такой дополнительный механизм может иметь следующие размеры: длина входного звена
0,2; длина дополнительного шатуна 0,936; длина выходного звена 0,2.
Такое конструктивное выполнение привода ножа режущего аппарата позволяет путем уравновешивания инерционных сил
исключить их вредное воздействие на корпус жатки, уменьшить виброактивность привода и увеличить тем самым, быстроходность и производительность режущего аппарата; разгрузить элементы привода ножа и их подвижные соединения от динамических реакций и увеличить, тем самым, долговечность привода.
Формула изобретения 1. Привод ножа режущего аппарата, содержащий корпус, нож и механизм качающейся шайбы, состоящий из входного вала с изогнутым коленом, шайбы и ведомого вала с коромыслом, кинематически соединенный с корпусом и ножом, о т л и ч а ющ и и с я тем, что, с целью повышения быстроходности и долговечности привода путем уравновешивания сил инерции, кинематическое соединение ведомого вала с корпусом выполнено посредством вращательной пары, а с ножом - посредством шатуна, соединенного сферическими шарнирами с коромыслом, установленным в плоскости вилки, и с ползуном, имеющим палец для шарнирного соединения с корпусом головки ножа, при этом привод снабжен первым и вторым противоположно качающимися противовесами, установленными соответственно на ведомом калу и параллельном последнему дополнительном валу, связанным между собой дополнительным механизмом с передаточным отношением - 1, причем параметры привода установлены по условию уравновешивав имя сил инерции ножа и коромысла согласно зависимостям
Mni Rni Mk Rk + 0,5 Мн Ak. Mn2Rn2 0,5 Мн Ak;
где Mni и Мп2 - массы первого и второго противовесов;
Rni и Rn2 - расстояние центров тяжести первого и второго противовесов соответственно от осей ведомого и дополнительного валов; ... .-;.- ; , , -. .у .
Мн и Mk - массы ножа и коромысла;
Ak-длина коромысла;
Rk - расстояние центра масс коромысла от оси ведомого вала. . ;..
.2. Привод по п. 1, отличающийся тем, что дополнительный механизм выполнен в виде двух зацепляющийся одинаковых цилиндрических зубчэтых колес, жестко установленных на ведомом и дополнительном валах. .- .Хл-у ....;: . . :- . ..
Фиг. 2
| Механизм привода режущего аппарата | 1988 |
|
SU1565386A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
