(21)4341603/31-02
(22)11.12.87
(46) 07.01.90. Бюл. V 1
(71)Ереванский политехнический институт им. К.Маркса и Производственное объединение Электростальтяжмаш
(72)Р.П.Джавахян, Е.П.Солодихин и А.А.Сухарев
(53) 621.771.06-589.4(088.8)
(56)Авторское свидетельство СССР V 137172 4, кл. В 21 В 21/00, 1986.
( ПРИВОД СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ
(57)Изобретение относится к трубопрокатному производству и может быть использовано в станах холодной прокатки труб с подвижной или стационарной клетью. Целью изобретения является повышение производительности за счет увеличения быстроходности стана путем одновременного уравновешивания динамических сил и моментов Привод
стана холодной прокатки труб содержит спаренный кривошипно-шатунный механизм с удлиненными шатунами 4. Изогнутые концы 15,16 шатунов расположены под углом ВАД друг к другу, соединены с помощью тяг 11 и 12 с пальцами 13 и 14 дополнительного противовеса 9- Длина тяг 11 и 12 выбирается равной радиусу кривошипа 3. Пальцы 13 и 14 на дополнительном противовесе установлены от оси его вращения на расстоянии, равном длине изогнутых концов 15 и 16 шатунов, и смещены на угол, равный углу между этими участками. Дополнительный противовес 9 установлен на оси кривошипных колес со- осно подшипникам кривошипа 3 и с помощью зубчатых секторов 17 и 18, выполненных с передаточным отношением, равным минус единице, кинематически связан с противовесом 6. Его ось установлена в подшипниках 7 на одном уровне с осью кривошипов 3. 6 ил.
§
(Л
л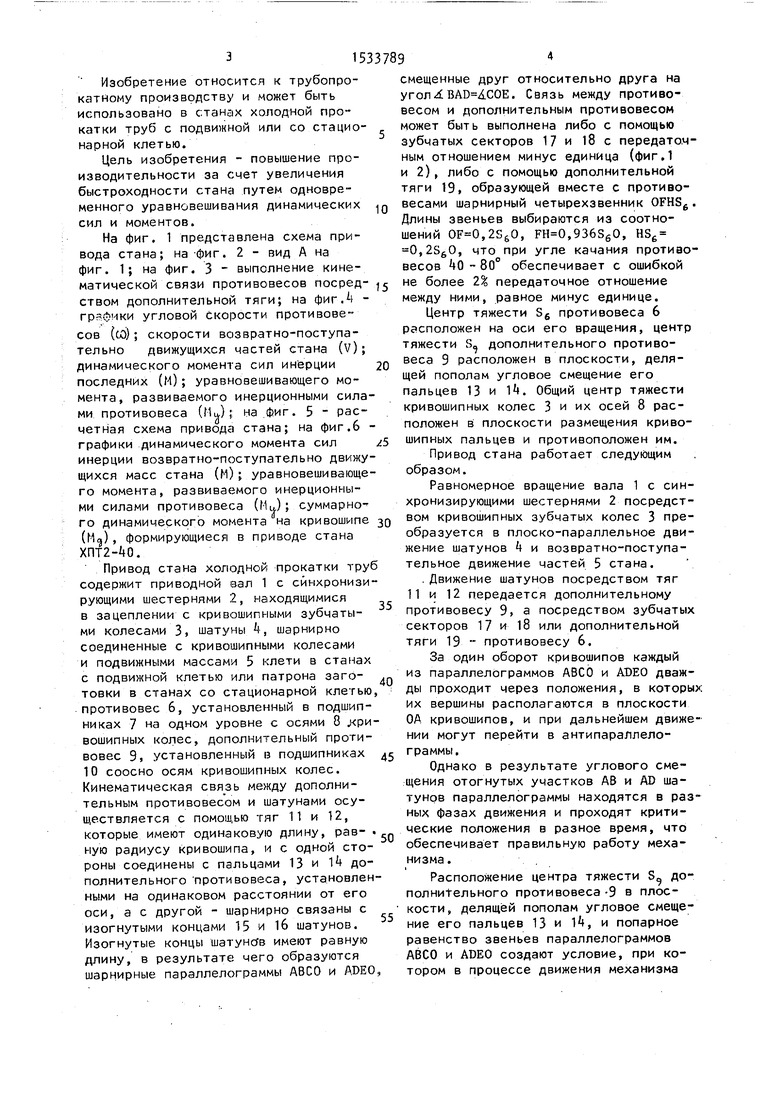
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
| Привод перемещения подвижных масс стана холодной прокатки труб | 1986 |
|
SU1412823A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1482741A1 |
| Привод возвратно-поступательного перемещения частей стана холодной прокатки труб | 1981 |
|
SU1062946A1 |
| Привод клети стана холодной прокатки труб | 1987 |
|
SU1447448A1 |
| РАБОЧАЯ ЛИНИЯ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 2005 |
|
RU2286221C1 |
| Стан холодной прокатки труб | 1986 |
|
SU1375362A1 |
| Привод возвратно-поступательного перемещения клетей многоклетьевого стана | 1985 |
|
SU1319949A1 |
| СИСТЕМА ПРИВОДА ДЛЯ СТАНА ХОЛОДНОЙ ПИЛЬГЕРНОЙ ПРОКАТКИ | 2003 |
|
RU2247613C1 |
| Привод клети стана холодной прокатки труб | 1988 |
|
SU1731310A1 |
Изобретение относится к трубопрокатному производству и может быть использовано в станах холодной прокатки труб с подвижной или стационарной клетью. Целью изобретения является повышение производительности за счет увеличения быстроходности стана путем одновременного уравновешивания динамических сил и моментов. Привод стана холодной прокатки труб содержит спаренный кривошипно-шатунный механизм с удлиненными шатунами 4. Изогнутые концы 15, 16 шатунов расположены под углом BAD друг к другу, соединены с помощью тяг 11 и 12 с пальцами 13 и 14 дополнительного противовеса 9. Длина тяг 11 и 12 выбирается равной радиусу кривошипа 3. Пальцы 13 и 14 на дополнительном противовесе установлены от оси его вращения на расстоянии, равном длине изогнутых концов 15 и 16 шатунов, и смещены на угол, равный углу между этими участками. Дополнительный противовес 9 установлен на оси кривошипных колес соосно подшипникам кривошипа 3 и с помощью зубчатых секторов 17 и 18, выполненных с передаточным отношением, равным минус единице, кинематически связан с противовесом 6. Его ось установлена в подшипниках 7 на одном уровне с осью кривошипов 3. 6 ил.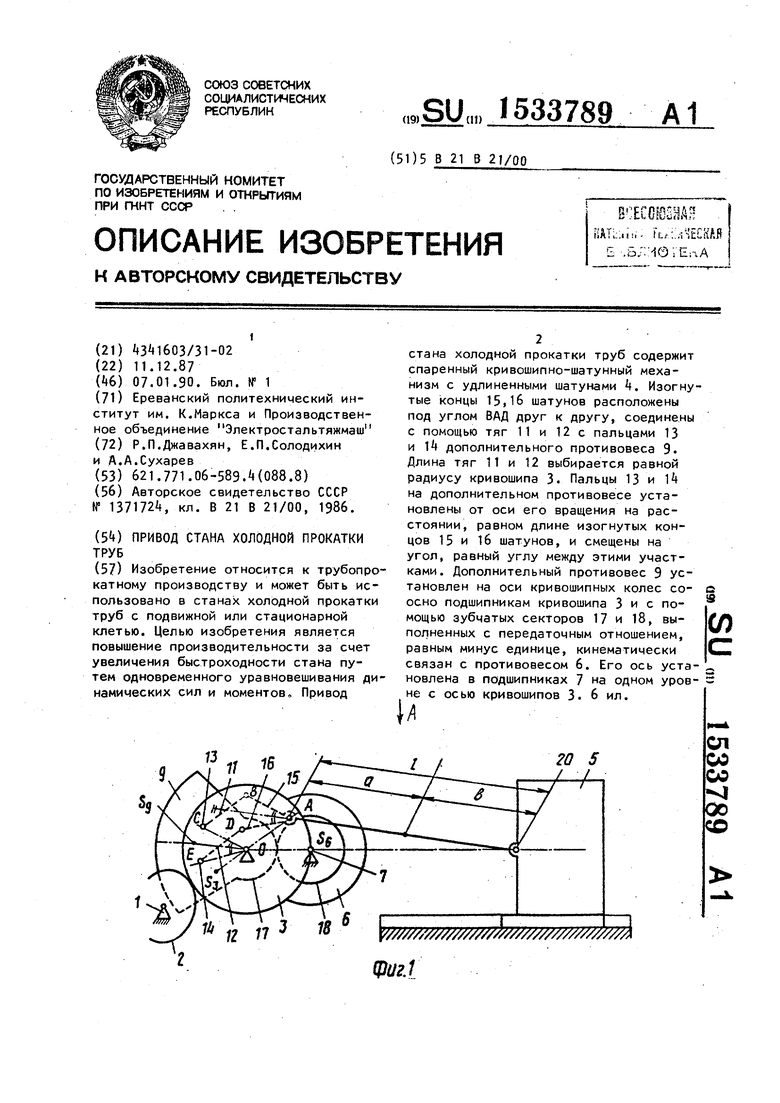
13
r/r/ss/r/y/s/w//
фиг.1
315
Изобретение относится к трубопрокатному производству и может быть использовано в станах холодной прокатки труб с подвижной или со стационарной клетью.
Цель изобретения - повышение производительности за счет увеличения быстроходности стана путем одновременного уравновешивания динамических сил и моментов.
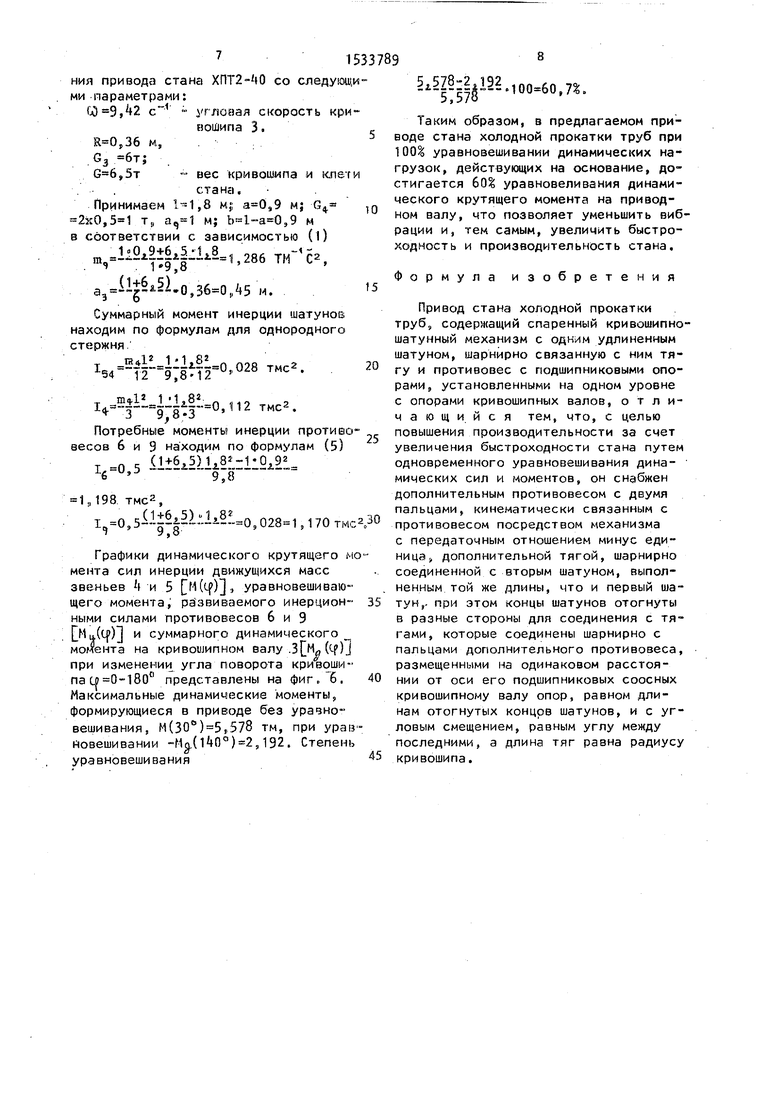
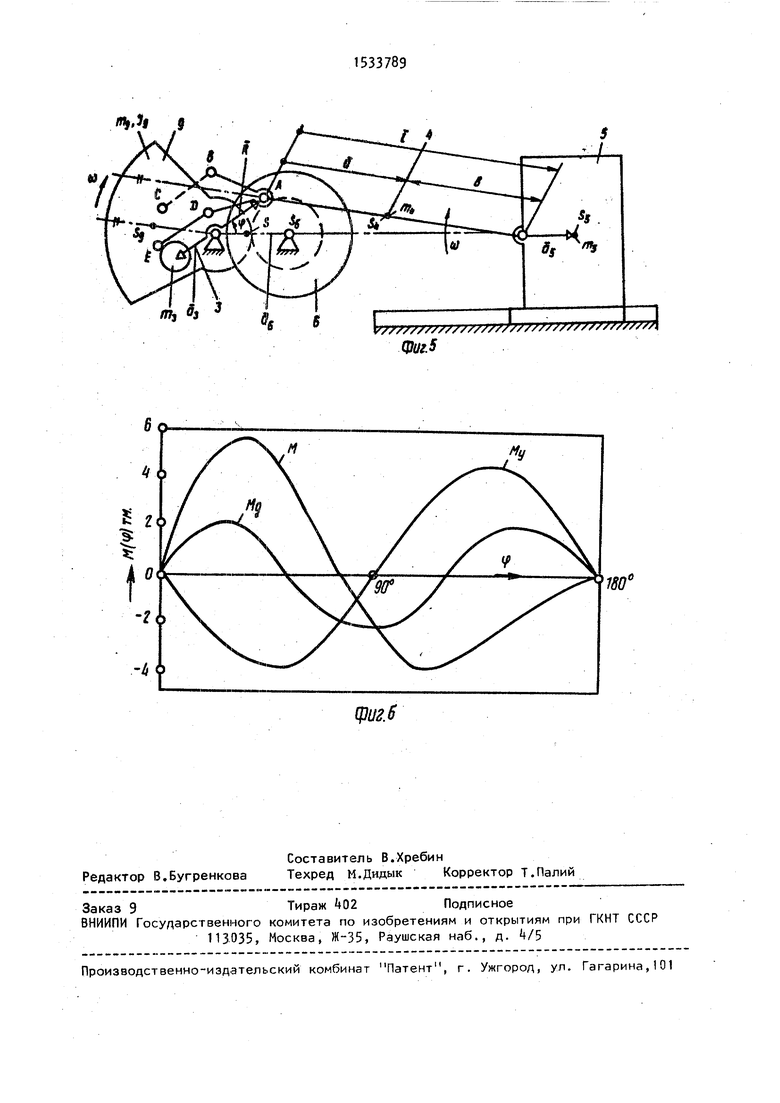
На фиг. 1 представлена схема привода стана; на фиг. 2 - вид А на фиг. 1; на фиг. 3 выполнение кинематической связи противовесов посред- ством дополнительной тяги; на фиг.4 - угловой скорости противовесов (со); скорости возвратно-поступательно движущихся частей стана (V); динамического момента сил инерции последних (М); уравновешивающего момента, развиваемого инерционными силами противовеса (Ми); на фиг. 5 - расчетная схема привода стана; на фиг.6 графики динамического момента сил инерции возвратно-поступательно движущихся масс стана (М); уравновешивающего момента, развиваемого инерционными силами противовеса (Ни); суммарного динамического момента на кривошипе (M(j), формирующиеся в приводе стана ХПТ2- 0.
Привод стана холодной прокатки тру содержит приводной вал 1 с синхронизирующими шестернями 2, находящимися в зацеплении с кривошипными зубчатыми колесами 3, шатуны k, шарнирно соединенные с кривошипными колесами и подвижными массами 5 клети в станах с подвижной клетью или патрона заготовки в станах со стационарной клетью противовес 6, установленный в подшипниках 7 на одном уровне с осями 8 .кривошипных колес, дополнительный противовес 9, установленный в подшипниках 10 соосно осям кривошипных колес. Кинематическая связь между дополнительным противовесом и шатунами осуществляется с помощью тяг 11 и 12,
которые имеют одинаковую длину, рав- . 5Q ческие положения в разное время, что ную радиусу кривошипа, и с одной сто- обеспечивает правильную работу меха- роны соединены с пальцами 13 и до- низма. полнительного противовеса, установленными на одинаковом расстоянии от его оси, а с другой - шарнирно связаны с изогнутыми концами 15 и 16 шатунов. Изогнутые концы шатунсГв имеют равную
Расположение центра тяжести Sg до55
полнительного противовеса -9 в плоскости, делящей пополам угловое смещение его пальцев 13 и И, и попарное равенство звеньев параллелограммов АВСО и ADEO создают условие, при котором в процессе движения механизма
длину, в результате чего образуются шарнирные параллелограммы АВСО и ADEO,
g
0 S о
$
5
0
смещенные друг относительно друга на угол4BAD ACOE. Связь между противовесом и дополнительным противовесом может быть выполнена либо с помощью зубчатых секторов 17 и 18 с передаточным отношением минус единица (фиг.1 и 2), либо с помощью дополнительной тяги 19, образующей вместе с противовесами шарнирный четырехзвенник OFHS6. Длины звеньев выбираются из соотношений ,2S60, ,936S60, HS6 0,2S60, что при угле качания противовесов 0 - 80° обеспечивает с ошибкой не более 2% передаточное отношение между ними, равное минус единице.
Центр тяжести S6 противовеса 6 расположен на оси его вращения, центр тяжести Sg дополнительного противовеса 9 расположен в плоскости, делящей пополам угловое смещение его пальцев 13 и 1. Общий центр тяжести кривошипных колес 3 и их осей 8 расположен в плоскости размещения кривошипных пальцев и противоположен им.
Привод стана работает следующим образом.
Равномерное вращение вала 1 с синхронизирующими шестернями 2 посредством кривошипных зубчатых колес 3 преобразуется в плоско-параллельное движение шатунов h и возвратно-поступательное движение частей 5 стана.
Движение шатунов посредством тяг 11 и 12 передается дополнительному противовесу 9, а посредством зубчатых секторов 17 и 18 или дополнительной тяги 19 - противовесу 6.
За один оборот кривошипов каждый из параллелограммов А8СО и ADEO дважды проходит через положения, в которых их вершины располагаются в плоскости ОА кривошипов, и при дальнейшем движении могут перейти в антипараллелограммы.
Однако в результате углового смещения отогнутых участков АВ и AD шатунов параллелограммы находятся в разных фазах движения и проходят критические положения в разное время, что обеспечивает правильную работу меха- низма. Расположение центра тяжести Sg до
полнительного противовеса -9 в плоскости, делящей пополам угловое смещение его пальцев 13 и И, и попарное равенство звеньев параллелограммов АВСО и ADEO создают условие, при котором в процессе движения механизма
51533789
плоскость, проходящая через центр тяжести 5„ дополнительного противовеса 9 и ось его вращения 0, будет всегда параллельна плоскости продольной оси шатунов 4. Такое движение дополнительного противовеса 9 и шатунов 4 происходит противофазно возвратно-поступательному движению масс 5 стана. При этом противовесы 9 и 6 имеют по четы- ре чередующихся участка торможения и разгона, обозначенные на фиг. 3 буквами Т и Р, и уравновешивают динамический момент на кривошипном валу, а центробежные силы инерции дололнитель ного противовеса 9 и кривошипов 3 уравновешивают силы инерции воззратно поступательно движущихся масс 5 стана и шатунов 4.
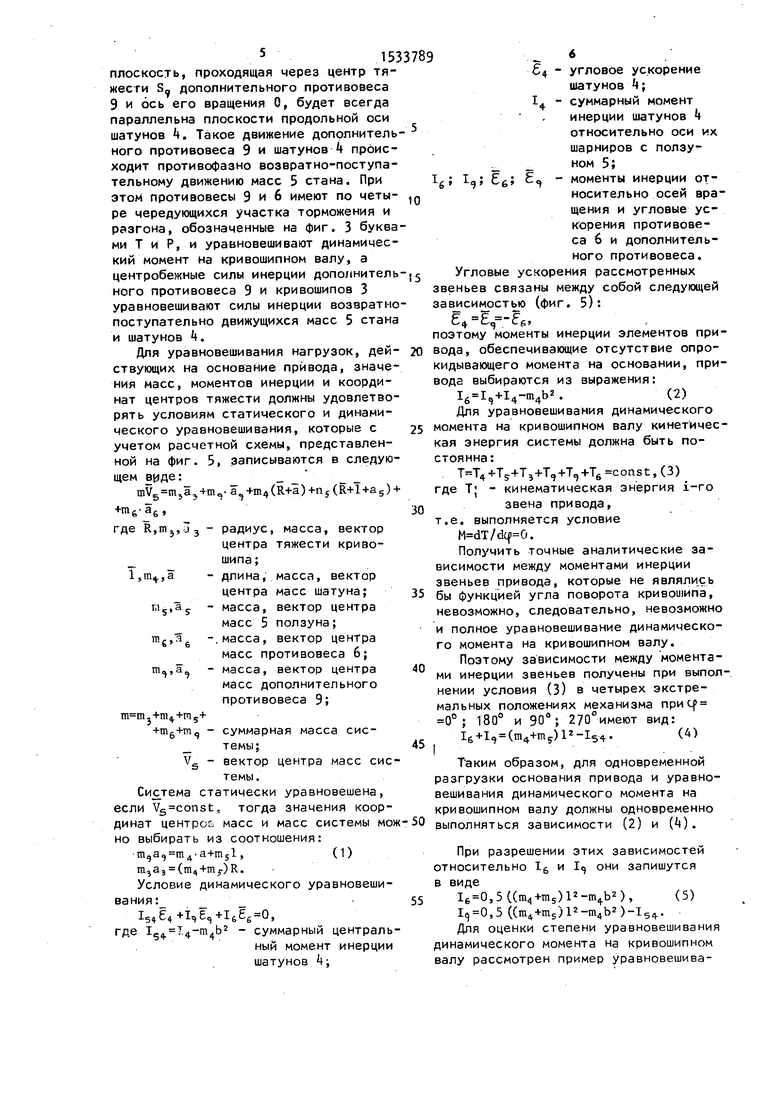
Для уравновешивания нагрузок, дей- ствующих на основание привода, значения масс, моментов инерции и координат центров тяжести должны удовлетворять условиям статического и динамического уравновешивания, которые с учетом расчетной схемы, представленной на фиг. 5, записываются в следующем виде:
a -t-m4(R+a)+nf(R+l+a5) +
тб а&«
де R,nij,j3 - радиус, масса, вектор центра тяжести кривошипа ; 1,11ц,а - длина, масса, вектор
центра масс шатуна; г.ц.а - масса, вектор центра
масс 5 ползуна; ms, -.масса, вектор центра
масс противовеса 6; го.а - масса, вектор центра масс дополнительного противовеса 9; т,+ тц+т5+
+m6+mq - суммарная масса сис- темы;
Vg - вектор центра масс системы. СиЈтема статически уравновешена,
Таким образом, для однов разгрузки основания привода вешивания динамического мом кривошипном валу должны одн
если V5 const. тогда значения координат центре: масс и масс системы мож-50 выполняться зависимости (2) но выбирать из соотношения:
m,a,m4 a+m5l,(1)
пца, (ni4+mf)R.
Условие динамического уравновешивания 55
154Б4-(-1ч +16Ј6 0,
где Ig4 T4-m4b2 - суммарный центральный момент инерции шатунов ;
При разрешении этих зави относительно 16 и Ц они за в виде
16-0,5(()1 -т4Ь),
,5 (()l2-m4bJ)-I
Для оценки степени уравн динамического момента на кр валу рассмотрен пример урав
/,
0
5
0
0
5
L6
-6
I. ё, Ј4 - угловое ускорение шатунов 4; суммарный момент инерции шатунов k относительно оси их шарниров с ползуном 5;
моменты инерции относительно осей вращения и угловые ускорения противовеса 6 и дополнительного противовеса. Угловые ускорения рассмотренных
звеньев связаны между собой следующей
зависимостью (фиг. 5):
Ј4
поэтому моменты инерции элементов привода, обеспечивающие отсутствие опрокидывающего момента на основании, приводе выбираются из выражения:
I6-I,+I4-m4b.(2)
Для уравновешивания динамического момента на кривошипном валу кинетическая энергия системы должна быть постоянна :
Т-Т4+Т5+Т3+Т,+Т«,+Т6 const, (3) где Т| - кинематическая энергия 1-го
звена привода, т.е. выполняется условие
(.
Получить точные аналитические зависимости между моментами инерции звеньев привода, которые не являлись 5 бы функцией угла поворота кривошипа, невозможно, следовательно, невозможно и полное уравновешивание динамического момента на кривошипном валу.
Поэтому зависимости между моментами инерции звеньев получены при выполнении условия (3) в четырех экстремальных положениях механизма приср
0° ; 180 и 90 ; 270 имеют вид: I6+I.,-(m4-nny). (4)
Таким образом, для одновременной разгрузки основания привода и уравновешивания динамического момента на кривошипном валу должны одновременно
и (k).
выполняться зависимости (2)
При разрешении этих зависимостей относительно 16 и Ц они запишутся в виде
16-0,5(()1 -т4Ь), (5)
,5 (()l2-m4bJ)-I54.
Для оценки степени уравновешивания динамического момента на кривошипном валу рассмотрен пример уравновешивания привода стана XDTZ- O со следующими параметрами:
СО - угловая скорость кривошипа 3. ,36 м, G3 6т; ,5т
Принимаем 2x0, т,
- вес кривошипа и клети
стана.
-1,8 м; ,9 м; G м; ,9 м
в соответствии с зависимостью (1)
ЬОг9+6Л5-1г8 9Я, т,jTgg- 286 ТМ С2,
а3 П+§15).о,,5 м.
Суммарный момент инерции шатунов находим по формулам для однородного стержня
ч,-гтН;Нг°.028
т 1 -1,8 л ,,- ,
Т -. - - - - - -- i- - : Л 117 2
3 98-3 Потребные моменты инерции противовесов 6 и 9 находим по формулам (5)
т о s 1±6л5 А8г-1 0л91- 16-и,:
1,198 тмс2,
1,0,5 ± Ы±§1в0,, 170 ТМС2
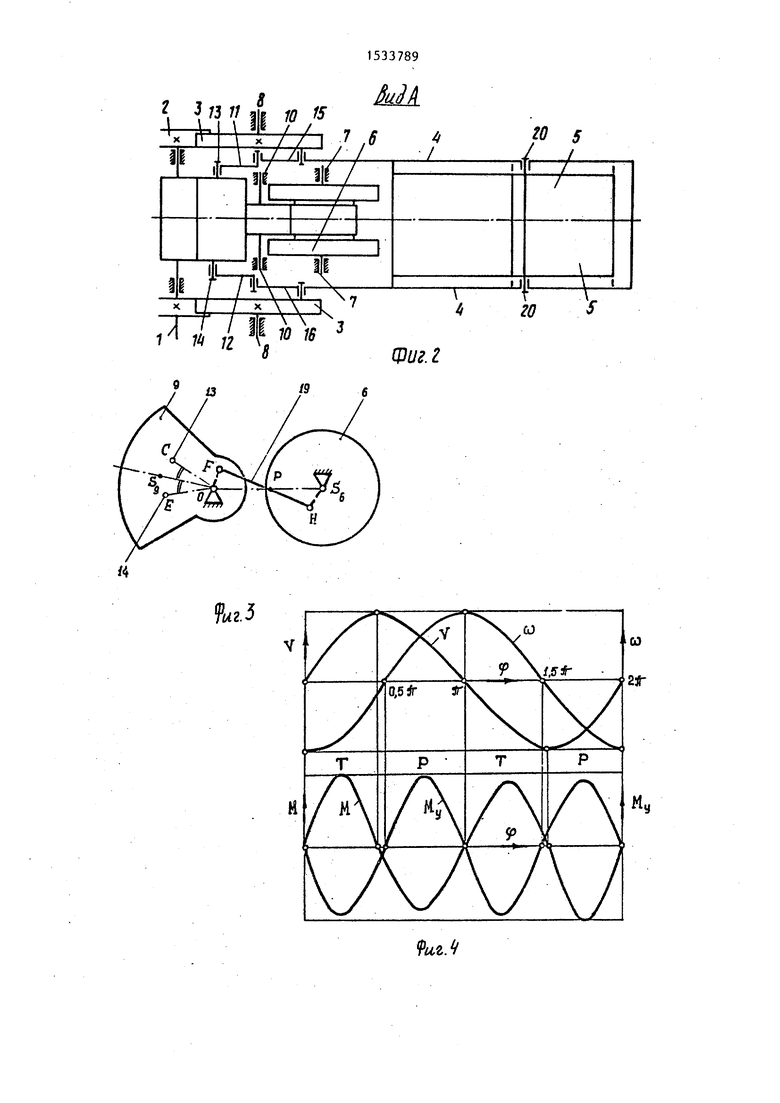
Графики динамического крутящего момента сил инерции движущихся масс звеньев Ц и 5 М(ч) уравновешивающего момента, развиваемого инерционными силами противовесов 6 и 9 Оц(ц)3 и суммарного динамического момента на кривошипном валу ( при изменении угла поворота кривошипа (j 0-180° представлены на фиг. 6. Максимальные динамические моменты, формирующиеся в приводе без уравновешивания, М(30°)5,578 тм, при уравновешивании -Mg.()2,192. Степень уравновешивания
5t§Z§:2d122.100.60iW.
0
5
0
5
Таким образом, в предлагаемом приводе стана холодной прокатки труб при 100% уравновешивании динамических нагрузок, действующих на основание, достигается 60% уравновеливания динамического крутящего момента на приводном валу, что позволяет уменьшить вибрации и, тем самым, увеличить быстроходность и производительность стана.
Формула изобретения
Привод стана холодной прокатки труб, содержащий спаренный кривошипно- шатунный механизм с одним удлиненным шатуном, шарнирно связанную с ним тягу и противовес с подшипниковыми опорами, установленными на одном уровне с опорами кривошипных валов, отличающийся тем, что, с целью повышения производительности за счет увеличения быстроходности стана путем одновременного уравновешивания динамических сил и моментов, он снабжен дополнительным противовесом с двумя пальцами, кинематически связанным с противовесом посредством механизма с передаточным отношением минус единица, дополнительной тягой, шарнирно соединенной с вторым шатуном, выполненным той же длины, что и первый шатун,, при этом концы шатунов отогнуты в разные стороны для соединения с тягами, которые соединены шарнирно с пальцами дополнительного противовеса, размещенными на одинаковом расстоянии от оси его подшипниковых соосных кривошипному валу опор, равном длинам отогнутых концов шатунов, и с угловым смещением, равным углу между последними, а длина тяг равна радиусу кривошипа.
H Я Ы Ю 15
10 / /
f/SEA -J1
II
JlL/
I т
ч т
I
t I/ У X
1 it 3
йи.З
/
/ 5
Т
1 /
го
Фиг г
Риг.4
.
т, os
фиг. 6
