7
/l ///////
//////А //////,
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод ножа режущего аппарата | 1987 |
|
SU1496682A1 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1482741A1 |
| Привод ножа режущего аппарата | 1990 |
|
SU1794366A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| ПАТЕНТНО-ТЕК!!Г:г"КДНБИБЛИОТЕКА | 1972 |
|
SU323099A1 |
| Переносная моторная пила | 1990 |
|
SU1794650A1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
Изобретение относится к сельскохозяйственному машиностроению ,в частности, к режущим аппаратам уборочных сельскохозяйственных машин. Цель изобретения - повышение быстроходности и долговечности привода путем уравновешивания динамических сил и моментов. Режущий аппарат содержит двойной универсальный шарнир с соосно установленными ведущим 1 и ведомым 2 валами, связанными между собой промежуточным валом 3 с вилками 4, расположенными в одной плоскости. Водило 5 жестко связано с ведомым валом 2 и кольцевым уравновешивающим сектором 6 и шарнирно установлено в корпусе 7 посредством опорных подшипников 8. Планетарный кривошип 9 с пальцем 10 шарнирно связан с корпусом головки ножа посредством подшипников 12 и снабжен противовесом 13, жестко установленным на кривошипе. Кривошипный вал установлен в подшипниках водила ведомого вала и несет жестко установленную на нем малую шестерню 16, обкатывающуюся внутри зубчатого венца большой шестерни 17. Сектор 6 и корпус 7 выполнены соответственно с кольцевыми выступами и канавками, образующими лабиринт. Ход H ножа, радиус R кривошипа и радиусы начальных окружностей шестерни 16 и большой шестерни 17 связаны равенствами: H = 4R = 4R16 = 2R17. При работе данного привода равномерное вращение вала 1 передается валу 2 и водилу 5. Шестерня 16, ведомая водилом и взаимодействующая с шестерней 17, передает кривошипному валу 14 равномерное вращение относительно вращающегося водила 5. При этом уравновешивающие элементы механизма обеспечивают разгрузку элементов привода от динамических реакций, уменьшают виброактивность и энергоемкость привода. 3 ил.
Фи,г.1
О5
00
У////////7////77/Л
домым валом 2 и кольцевым уравновешивающим сектором 6 и шарнирно установлено в корпусе 7 посредством опорных подш1тпиков 8. Планетарный кривошип 9 Q пальцем 10. шарнирно связан с корпусом головки ножа посредством подшипников 12 и снабжен противовесом 13, жестко установленным на кривошипе Крнвошипньй вал установлен в подшипниках водила ведомого вала и несет жестко установленную на нём малую шестершо 16, обкатываюв;уюся внутри зубчатого венца большой шестерни 17, Сектор 6 и корпус 7 выполнены соответственно с кольцевыми выступами и канавками, образуюш,ими
Изобретение относится к сельскохозяйственному машиностроению, в частности к режущим аппаратам уборочных сельскохозяйственных машин
Целью изобретения является повышение быстроходности и долговечности привода ножа путем уравновешивания динамических сил и моментов,
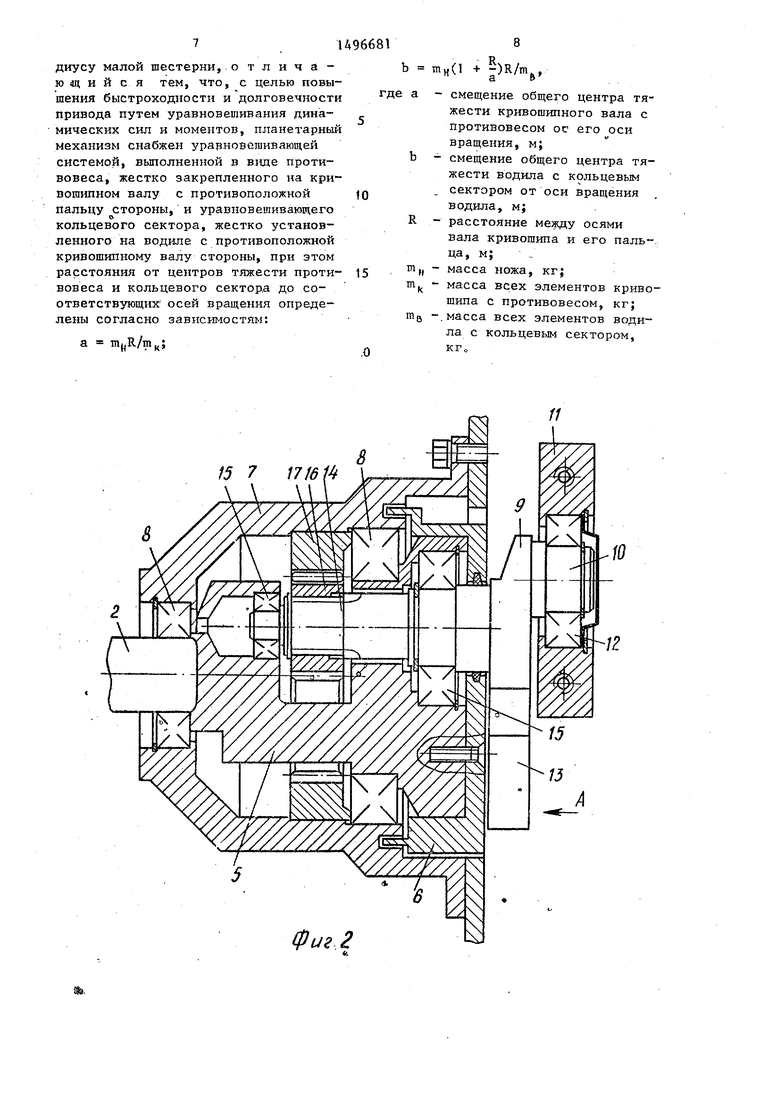
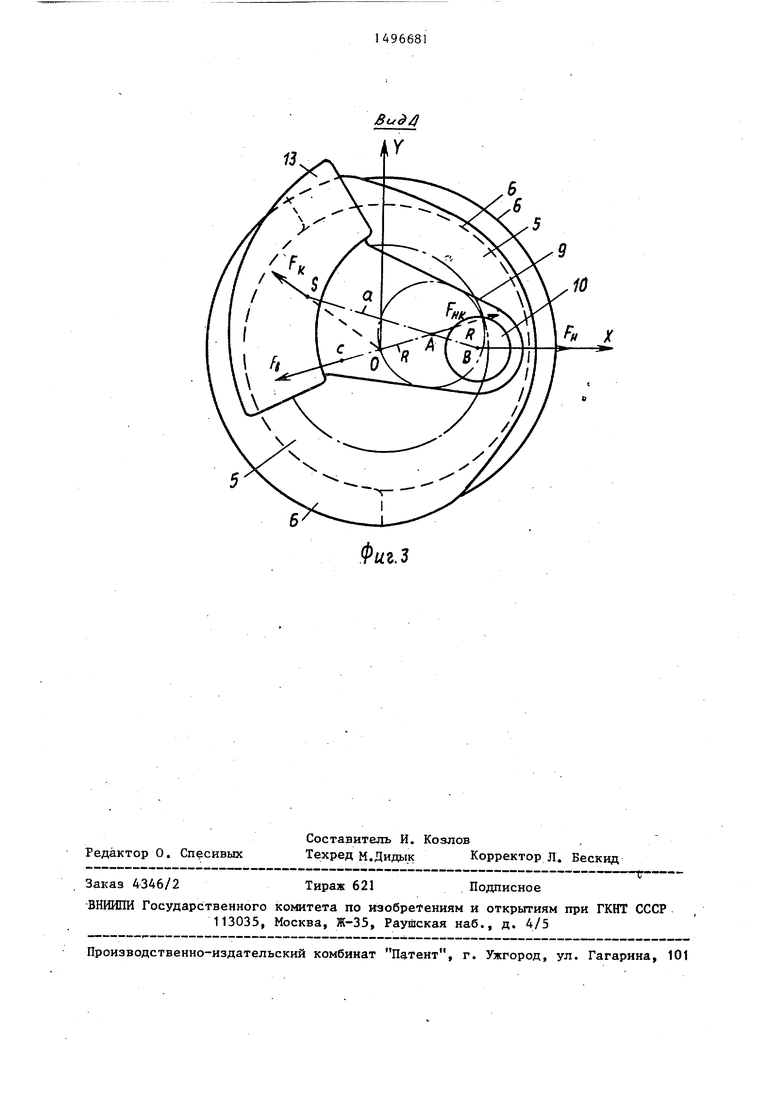
На фиго 1 представлена.кинематическая схема привода ножа; на фиг, 2 - планетарный механизм с планетарным кривошипом; на фиг 3 - вид А на фиг, 2 с инерционными силами
Привод ножа режущего аппарата содержит двойной универсальньй шарнир с соосно установленными ведущим 1 и ведомым 2 валами, связанными
между собой посредством.промежуточного вала 3 с вилками 4, располо- женньми в одной плоскости, водило 5, жестко связанное с ведомым валом и кольцевым уравновешивающим сектором 6 и поворотно установленное в корпусе .7 посредством опорных подшипников 8, и планетарный кривошип 9 с пальцем 10, шарнирно связанным с корпусом 11 головки ножа посредством подшипника 12, и противовес 13, жест ко установленный на кривошипе,
Крнвош1-тный вал 14 установлен в подшипниках 15 водила параллельно ведомому валу 2 и несет жестко установленную на нем малую шестерню 16, обкатьшающуюся внутри зубчатого венца большой шестерни 17, жестко установленной в корпусе 7 соосно подшипникам Во Кольцевой сектор 6 и кор
лабиринт. Ход h ножа, радиус R кривошипа и радиусы начальных окружностей шестерни 16 и большой шестерни 17 связаны равенствами; h 4R 4R , - 2R, При работе данного привода равномерное вращение вала 1 переда- ется валу 2 и водилу 5, Шестерня 16, ведомая, водилом и вщаимодействующая с шестерней 17, передает кривошипному валу 14 равномерное вращение относительно вращающегося водила 5 При этом уравновешивайщие элементы механизма обеспечивают разгрузку элементов привода от динамических реакций, уменьшают виброактивность и энергоемкость привода, 3 ил.
пус 7 вьшолнены соответственно с кольдевыми, выступами и канавками, образующими лабиринт, предотвращающий загрязнение.
Ход h ножа, радиус R кривошипа и радиусы начальных окружностей ма-. лой 16 и большой 17 шестерен связаны равенствами
h 4R 4R., 2R,..,,
Режущий аппарат работает следующим образом,
I
Равномерное вращение ведущего вала 1 с частотой двойных ходов ножа посредством двойного универсального шарнира передается ведомому валу 2 н водилу 5 Шестерня 16, ведомая водилом и взаимодействзгющая с шестерней 17, передает кривошипному валу 14 равномерное вращение в подшипниках 15 относительно вращающегося водила
При этом в силу принятых соотно- шент (R ,, 2R 2R) угловая скорость кривошипа 9 равна и противопо- Гложно направлена угловой скорости водила 5, а центр пальца 10 кривош1ша совместно с корпусом 11 головки ножа движется возвратно-поступательно и обеспечивает ход h 4R последнего.
Массы подвижных относительно корпуса частей привода ножа и расположение их центров тяжести устанавливаются по условию полного уравновешивания динамических сил и моментов
1
элементов режущего аппарата согласно зависимостям
т„К/а;
Кч
+ )R/b,
(1) (2)
где m - масса ножа;
R - расстояние между осями кривошипного вала 14 и его пальца 10 (радиус кривошипа) ;
т и а - суммарная ма-сса всех эле- ментов, жестко связанных, с планетарным кривошипом 9 и его валом 14, и смещение их общего центра тяжести от оси кривошипного вала 1А|
mg и Ъ - суммарная масса водила 5 и жестко связанных с ним уравновешивающего кольцевого сектора 6, внутренних колец опорных подшипников 8 и наружных колец подшипников 15 водила и смещение их общего центра тяжести от оси ведомого вала 2о Из четырех параметров ш, Год, а и b уравновешивания конструктивно выбираются смещения а и b центров тяжести, а массы определяются по
предлагаемым зависимостям. 1
Первая из этих зависимостей получена по совмещения с осью кривошипа вала 14 центра тйжести системы планетарный кривошип (со всеми жестко связанными с ним элементами, включая противовес) - нож в предположении, что масса последнего условно сосредоточена на пальце 10 кривошипа При назначении параметров mj и а по этой зависимости силы инерции ножа F (фиг. 3) и направленная вдоль радиуса OS суммарная сила инерции F, планетарного кривошипа с противовесом на кривошипном валу 14 создают равные и противонаправленные динамические моменты и обеспечивают уравновешивание динамического момента этих сил как на кривошипе, так и на водилео Этим достигается полная разгрузка валов 1-3, водила 5, кривошипного вала 14, его подшипников 15 и-зацепления шестерен 16-17 от знакопеременного динамического крутящего момента и обеспечивается постоянство внутри
966816 „
цикла как приведенного момента инерции режущего аппарата, так и ее кинетической энергии Все это, в свою очередь, приводит к исключению пульсации кинетической энергии между ножом и ведущим валом его привода и к уменьшению энергоемкости последнего. Кроме этого, при назначении па- 1Q раметров привода по первой зависимости вектор суммарной силы инерции
FHK FH+FK
15 расположен в радиальной плоскости, содержащей оси ведомого вала 2 и кривошипного вала 14 (фиг 3).
Вторая зависимость получена по условию совмещения центра масс ножа и всех подвижных элементов его привода с неподвижной осью вращения водила (в предположении, что масса но-- жа сосредоточена на пальце 10 криво шипа). При назначении по этой зависимости параметров Пц и b центробежная сила инерции Fg водила уравновешивает силы инерции F, F,, вследствие чего корпус привода, следовательно, и корпус жатки полностью
разгружается от вредного воздействия не только переменньш инерционных сил, но и их динамического момента относительно оси ведомого вала (на фиг. 3 все силы пересекаются с этой
осью).
Вьшолнение условий (1) и (2) гарантирует также равенства нулю работы сил тяжести элементов режущего аппарата, что, в свою очередь,
также приводит к уменьшению расходуемой мощности.
Формула изобретения
Привод ножа режущего аппарата, вьшолнеыный в виде планетарного механизма, состоящего из щарнирно установленного в корпусе водила и двух шестерен: малой с наружным зацеплеиием, жестко установленной на валу планетарного кривошипа, который шар- мирно установлен на водиле, и боль- шой с внутренним зацеплением, жестко закрепленной в корпусе планетарного
механизма, при этом палец кривошипа шарнирно связан с корпусом головки , ножа, большая шестерня по отношению :1 малой имеет вдвое большее число зубьев, а радиус кривошипа равен ра-
диусу малой шестерни,.отличающий с я тем, что, с целью повышения быстроходности и долговечности привода путем уравновешивания динамических сил и моментов, планетарный механизм снабжен урарновсгаивающей системой, выполненной в виде противовеса, жестко закрепленного на кривошипном валу с противоположной пальцу стороны, и уравновешивающего кольцевого сектора, жестко установленного на водила с противоположной кривошипному валу стороны, при этом расстояния от центров тяжести противовеса и кольцевого сектора до со- ответствукицих осей вращения определены согласно зависимостям:
т,
Д/
та
к
15 7 17/61
фиг 2
Ь т„(1
RV
. f)RM,,
где а - смещение общего центра тяжести кривошипного вала с противовесом ос его оси вращения, м;
смещение общего центра тяжести водила с кольцевым сектором от оси вращения водила, MJ
расстояние между осями вала кривошипа и его паль-, ца, м;
масса ножа, кг; масса всех элементов кривошипа с противовесом, кг; .масса всех элементов водила с кольцевым сектором,
КГо
b R m,, m Шд Редактор о. Спесивых
Составитель И. Козлов
Техред м.Дидык Корректор Л. Бескид
Заказ 4346/2
Тираж 621
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
10
Фиг.З
Подписное
tr
| Авторское свидетельство СССР ,№ 128677, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
