Изобретение относится к области строительства и в частности, предназначено для выравнивания сооружений, эксплуатирующихся в сложных инженерно-геологических условиях и получивших крен.
Цель изобретения - повышение надежности работы устройства.
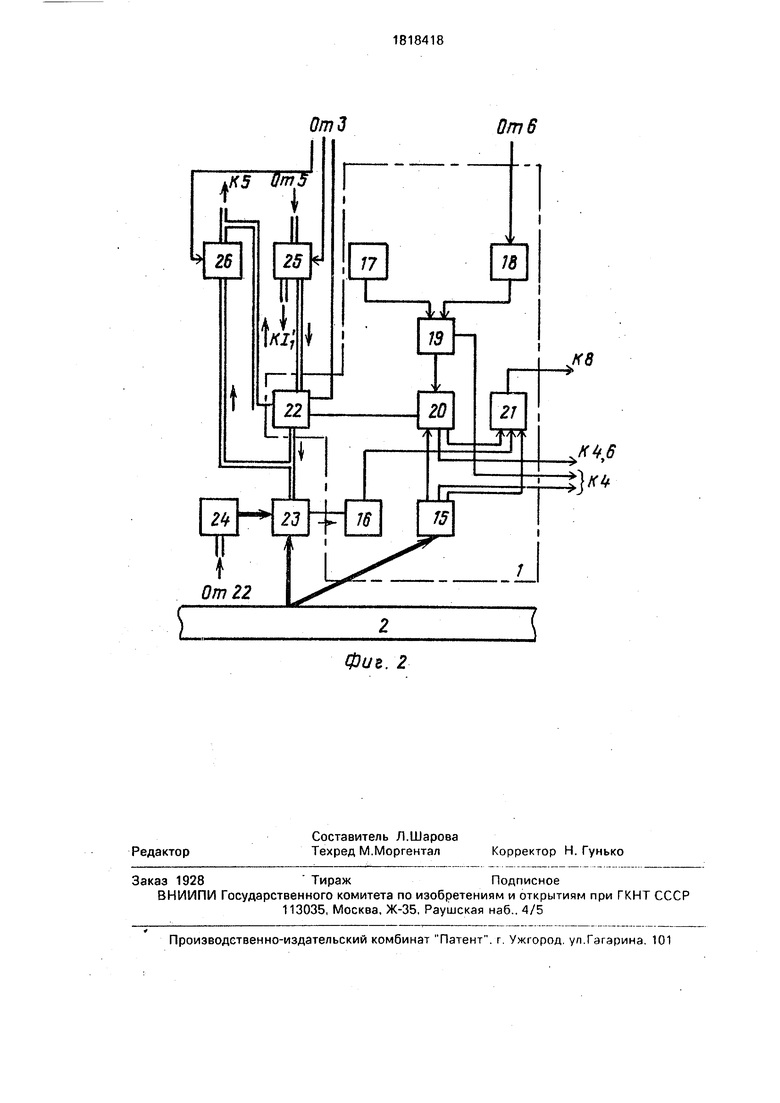
На фиг.1 приведена структурная схема устройства в целом; на фиг.2 - структурная схема канала управления домкратом.
Устройство для регулирования положения сооружений содержит: однотипные каналы управления 1 гидравлических домкратов, число которых определяется грузоподъемностью используемых домкратов, массой и конструкцией перемещаемых объектов 2 (на фиг.1 показаны два канала), блок 3 включения каналов, блок 4 индикации для контроля работы каждого из каналов управления, маслонасоснуга станцию 5 с регулирующим органом подачи питания для гидросистем устройства: программное
устройство 6с ручным вводом 7 программы регулирования положения для выдачи команд блоку 3 включения каналов регулирующему органу подачи питания маслонасосной станции 5, вычисления и выдачи сигналов задания по перемещению каждому из каналов 1 управления; блок 8 общей защиты, блок 9 датчиков контроля положения регулируемого объекта с многоканальным двухпозиционным переключате- лем 10 с ручным приводом 11, (не. входящему в состав устройства) блок 12 сигнализации об опасных деформациях и изме- нениях состояния контролируемого сооружения.
Каждый канал управления включает датчик 15 перемещений регулируемого сооружения относительно опорной поверхности фундамента на участке установки домкрата-и датчик 16 давления в рабочей полости домкрата с усилителями-преобразователями, которые на чертеже не показа(/
С
00
00
00
ны, устройство 17 для ввода задания по перемещению в режиме ручного управления домкратом, формирователь 18 сигнала задания в режиме автоматического управления домкратом, переключатель 19 вида управления (ручного и автоматического), регулятор 20 перемещения, блок 21 канальной защиты и электрогидравлический усилитель 22.
Кроме того, устройство включает домкрат 23. с разгружающим устройством 24 и входной и сливной краны 25 и 26. маслона- сосной станции (см. фиг.2).
Устройство работает следующим образом.
Решение о регулировании положения конкретного сооружения 2 принимается на основании информации, получаемой от блока 12 сигнализации об опасных деформациях и изменениях состояния этого сооружения при установке переключателя 10 в положение, при котором блок 9 датчиков 6 подключен к этому блоку 12.
Непосредственно процессу регулирования положения, например, выравнивания, предшествуют подготовительные этапы: подготовка сооружения 2, включающая выполнение ниш (проемов) между фундаментом и цокольным поясом здания для установки домкратов 13 (ниши могут быть предусмотрены еще при строительстве здания); размещение, монтаж, подключение составных элементов установки; сбор и обработка исходных данных, формирование программы выравнивания и ввод ее в программное устройство 6; настройка элементов, в частности, установка уровней срабатывания устройств противоаварийной защиты блоков 8, 21, перевод переключателя 10 в положение, при котором блок 9 датчиков отключается от внешнего блока 12 сигнализации и подключается к устройству для регулирования положения; опробование элементов и устройства в целом, в частности, проверка работы каждого из каналов 1 при установке (на время проверки) переключателей 19 в положение, соответствующее ручному управлению, с введением задания от устройства ручного ввода 17 и контролем по блоку 4 индикации. После завершения подготовительных операций осуществляется запуск каналов, включение устройства в автоматическом режиме.
В соответствии с реализуемой программой выравнивания программное устройство 6 вырабатывает программные задания с учетом показаний датчиков блока 9 для формирователей 18. задействованных каналов,
выдающих (в случае использования анало-говых регуляторов 20) аналоговые сигналы
задания, которые изменяются по закону,
обеспечивающему принятый временный график технологического процесса выравнивания. В схеме сравнения регулятора 20 каждого из каналов 1 непрерывно вычисляется сигнал рассогласования, представляю0 щий собой разность между фактическим (определяемым по сигналам датчика 15 перемещений) и заданным значениями перемещений. Из сигнала рассогласования в регуляторе 20 формируется и в соответствии
5 с принятым законом (например, ПИД-зако- ном) управляющий сигнал, который после усиления по мощности поступает на вход сервоклапана гидроусилителя 22. В зависимости от параметров управляющего сигнала
0 сервоклапана воздействует на расход жидкости, направляемой в домкрат 23, таким образом, чтобы рассогласование убывало до нуля и в каждый момент времени фактическое значение перемещения равнялось
5 заданному.
Идентификация опасных (предаварий- ных) ситуаций в процессе работы устройства осуществляется с помощью индикаторов, входящих в состав блока 8 общей защиты,
0 блоков 21 канальной защиты и блока 5 защиты маслонасосной станции. При опасных ситуациях блок 8 воздействует на каналы 1 через программное устройство 6.
Данное устройство позволит повысить
5 надежность работы.
Формула изобретения Устройство для регулирования положения сооружений с помощью гидравлических домкратов, содержащее программное уст0 ройство, каналы управления гидравлических домкратов и регулирующий орган подачи питания, отличающееся тем, что, с целью повышения надежности работы, оно снабжено блоком включения, бло5 ком общей защиты, переключателем, блоком датчиков контроля положения сооружения и блоками индикации каналов управления и сигнализации, причем блок датчиков контроля положения сооружения
0 подключен через переключатель к блоку сигнализации, к первому входу блока общей защиты и первому входу программного устройства, соединенного с исполнительным механизмом регулирующего органа подачи
5 питания, который соединен с каналами управления гидравлических домкратов и с вторым входом блока общей защиты, выход которого подключен к второму входу программного устройства, выходы которого соединены с входами каналов управления
гидравлических домкратов, выходы которых щиты и программного блока, выход которо- соединены с остальными входами блока за- го подключен к входу блока включения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| Система подъёма и выравнивания здания, сооружения | 2003 |
|
RU2224845C1 |
| РЕЗОНАНСНЫЙ СТЕНД | 2007 |
|
RU2348022C1 |
| Система централизованного освещения производственных помещений и сооружений с большой световой нагрузкой | 2019 |
|
RU2729476C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АГРЕГАТОМ | 2001 |
|
RU2213889C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| Автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний | 2016 |
|
RU2643198C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |

Использование: строительная область, в частности для выравнивания сооружений. Сущность изобретения: устройство содержит каналы управления гидравлических домкратов, блок включения каналов, блок индикации, блок питания, программное устройство с ручным вводом, блок общей защиты, блок датчиков контроля положения регулируемого объекта, переключатель, блок сигнализации. 2 ил.
Гидрадлич.
Мыанич.
длектрич.
Фиг./
ОтЗ
Фиг. 2
Отб
v/T4tf
| Методические указания по выравниванию бескаркасных зданий на подрабатываемых территориях с помощью домкратов, Киев, ИИИСК, 1984. |
