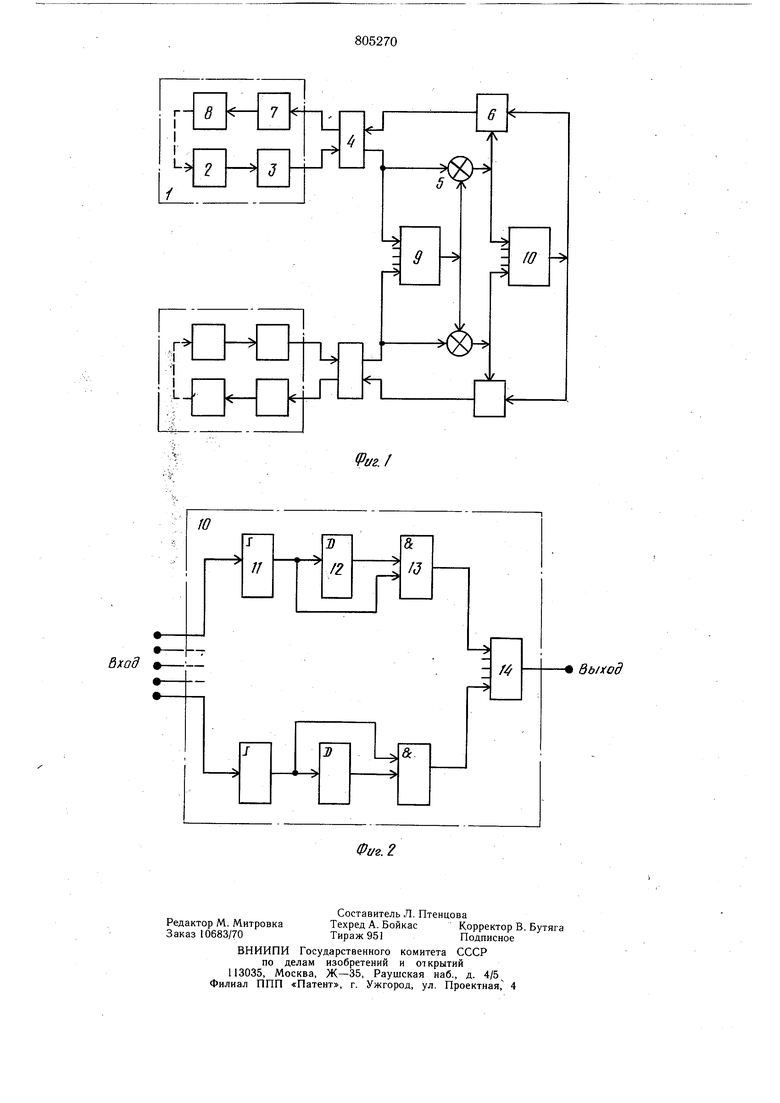
(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ГРУППЫ МАШИН ПРИ ИСПЫТАНИЯХ НА ТРЕКЕ рийного блока соединен со входом каждого функционального преобразователя, а каждый из входов аварийного блока связан с датчиком скорости движения- соответствуюшего трактора. Данная система осуществляет непрерывное выравнивание скоростей движения тракторов относительно текущего значения средней скорости группы, что позволяет проводить-испытания как на малых, так и на высоких скоростях 2. Недостатком этой системы является невысокая безопасность испытаний. Аварийный блок функционирует как логический элемент Шеффера, .Он реагирует на останов любого из тракторов и выдает в этом случае команду на останов всей группы объектов испытания. Если все тракторы движутся, аварийный блок не оказывает влияния на работу системы. Однако часто имеют место отказы в тракторе и обслуживающих его устройствах автоматики, которые не приводят к полной остановке объекта. Такой трактор может, например, продолжать движение с очень малой скоростью, не реагируя на управляющие сигналы со стороны системы автовождения.. Аварийный блок не реагирует на такого рода ситуации, что может привести к столкновению объектов в ходе испытаний. Цель изобретения - повыщение надежности устройства. Поставленная цель достигается тем, что в устройство для регулирования скорости группы мащин при испытаниях на треке, содержащее по числу машин каналы управления, состоящие из последовательно соединенных датчика скорости, согласующего элемента, блока связи, элемента сравнения, функционального преобразователя и исполнительного механизма, а также блок усреднения, входы которого подключены к выходам блоков связи, а выходы - ко вторым входам элементов сравнения, введены элемент ИЛИ и по числу машин последовательно соединенные пороговые элементы, элементы задержки и элементы И, причем jgxoды пороговых элементов соединены с выходами соответствующих элементов сравнения. вторые входы элементов И - с выходами соответствующих пороговых элементов, вход элемента ИЛИ - с выходами элементов И, а выход - со вторыми входами функциональных преобразователей. Такое выполнение предлагаемого устройства позволяет повысить безопасность испытаний, поскольку аварийный блок реагирует на более широкий спектр опасных ситуаций, могущих привести к столкновению объектов в ходе испытаний. . Показателем наличия аварийной ситуации в данной системе является отклонение скорости движения любого трактора от средней скорости группы свыще допустимого значения (сюда входит, как частный случай, и останов трактора). На фиг. и 2 изображена структурная схема предлагаемого устройства. На объекте 1 испытания установлен датчик 2 скорости, соединенный через согласующий элемент 5 блоком 4 связи с одним из входов элемента 5 сравнения. Выход элемента 5 через функциональный преобразователь 6, блок и исполнительный механизм 7 соединен с регулятором 8 скорости движения трактора 1. Число датчиков и регуляторов скорости, преобразователей, элементов сравнения и исполнительных механизмов равно числу объектов испытания. Одновременно выходы элементов 3 через блоки 4 подключены к соответствующим входам блока 9 усреднения, выход которого соединен с другим входом каждого элемента 5 сравнения. Выход каждого элемента 5 сравнения подключен ко входу каждого функционального преобразователя 6 и к соотг ветствующему входу блока 10, выход которого соединен с другим входом каждого функционального преобразователя 6. Блок 10 (фиг. 2) состоит из пороговых элементов 11, элементов 12 задержки, элементов 13 И и элемента 14 ИЛИ. Выход каждого порогового элемента 11 соединен со входом элемента 12 задержки и одним из входов элемента 13 И, выход элемента задержки - с другим входом элемента 13 И, выход которого подключен к соответствующему входу элемента 14 ИЛИ. Число пороговых элементов, элементов задержки и элементов И равно числу испытываемых мащин. Устройство работает- следующим образом. При равенстве скоростей движения всех мащин (тракторов) на выходе элементов 5 сигнал от утствует, и регуляторы 8 скорости неподвижны. При уменьшении скорости движения какого-либо трактора (например 1) величина сигнала, поступающего от датчика 2. скорости через элемент 3 и блок 4 на один из входов элемента 5 сравнения и .., блока 9 усреднения, уменьщается. Сигнал на выходе блока 9 усреднения, соответствующий средней скорости движения группы, также уменьшается, но незначительно, На выходе элемента 5 сравнения позволяет сигнал рассогласования, под действием которого регулятор 8 скорости трактора 1 с помощью функционального преобразователя 6 и исполнительного механизма 7 увеличит скорость Движения данного трактора. Одновременно на выходе других сравнивающих устройств появляется сигнал рассогласования противоположной полярности, что ведет к некоторому увеличению скорости движения остальных объектов испытания. Таким образом, при уменьшений скорости движения какого-либо, трактора система осуществляет регулируемое увеличение его скорости с одновременным снижением
скорости движения остальных объектов и стабилизирует значение средней скорости группы в новой точке.
Ааналогично при увеличении скорости движения одного из тракторов имеет место регулируемое снижение скорости опережающего объекта и одновременно увеличение скорости всех прочих тракторов. При отклонении скорости какого-либо трактора от средней скорости движения группы система осуществляет направленное регулирование скорости движения всех испытьгваемых тракторов и стабилизацию нового значения средней скорости группы.
В процессе работы системы сигналы рассогласования, соответствующие величине отклонения скорости того или иного трактора от текущего значения средней скорости движения группы, с выходов элементов 5 сравнения поступают для анализа на входы блока 10, а именно на в,ходы пороговых элементов 11. Если величина рассогласования не превыщает пороговой уставки, то аварийный блок не оказывает влияния на работу системы. Пороговые устройства могут быть регулируемыми. Величина уставки определяется из нормального разброса значений скорости для партии испытываемых тракторов (обычно он составляет 3-8J$. Если величина рассогласования на какомнибудь входе аварийного блока больще допустимого значения, то на выходе соответствующего порогового устройс,тва появляется сигнал, поступающий на вход элемента 12 задержки и один из входов элемента 13 И. Элемент 12 задержки совместно с элементом 13 И осуществляет проверку стабильности отклонения скорости трактора от скорости группы. При случайном, кратковременном отклонении не требуется останавливать все тракторы. Поэтому, если рассогласование уменьшается до допустимого значения за время, определяемое элементом задержки, на выходе элемента сигнал не появляется, Элементы задержки могут быть регулируемые.
В случаее, когда отклонение скорости трактора от средней скорости движения группы значительное и некратковременное, на выходе соответствующего элемента 13 И появляется сигнал, поступающий на вход элемента 14 ИЛИ. В результате появляется
сигнал, под действием которого функциональные преобразователи 6 выдают через исполнительные механизмы 7 команду регуляторам 8 скорости на останов всех объектов испытания, чем устраняется возможность столкновения тракторов и повышается безопасно(ть испытаний.
Столкнрвения тракторов в ходе испытаний приводят к повреждению объектов испытания и установленных на них устройств автоматики, снижают качество испытаний, удлиняют сроки их проведения и, соответственно, увеличивают их стоимость. Поскольку предлагаемая система автоматического вождения группы тракторов на треке обеспечивает отсутствие наездов, повышая безопасность испытаний, ее экономическая эффективность определяется перечисленными выше факторами.
Формула изобретения
Устройство для регулирования скорости группы машин при испытаниях на треке, содержащее по числу машин каналы управления, состоящие из последовательно соединенных датчика скорости,Согласующего элемента, блока связи, элемента сравнения, функционального преобразователя и исполнительного механизма, а также блок усреднения, входы которого подключены к выходам блоков связи, а выходы - ко вторым входам элементов сравнения, отличающееся тем, что, с целью повыщения надежности устройства, оно содержит элемент ИЛИ и по числу машин последовательно соединенные пороговые элементы, элементы задержки и элементы И, причем входы пороговых элементов соединены с выходами соответствующих элементов сравнения, вторые входы элементов И - с выходами соответствующих пороговых элементов, вход элемента ИЛИ - с выходами элементов И, а выход - со вторыми входами функциональных преобразователей.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство-СССР № 464284, кл. А Oi В 69/04, 1972.
2.Авторское свидетельство СССР
№ 620234, кл. А 01 В 69/04, 1977 (прототип).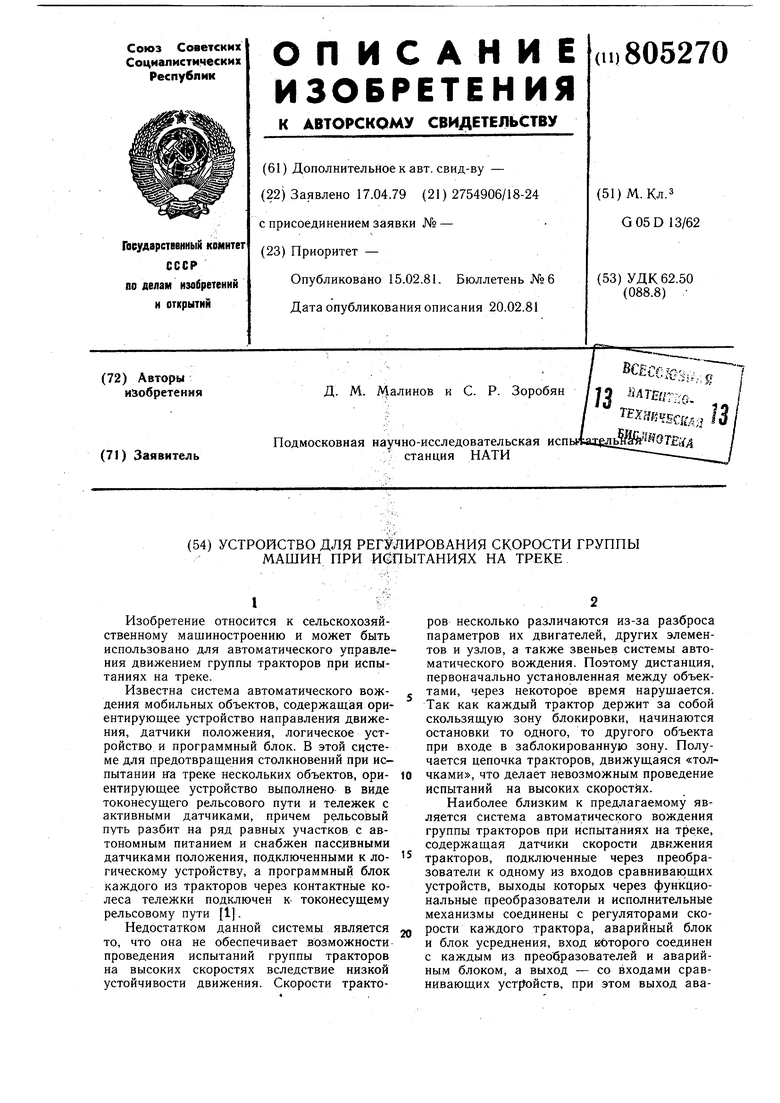
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
| Автоматизированная система управления рудовосстановительной электропечи | 1981 |
|
SU954770A1 |
| Система автоматического вождения мобильных агрегатов | 1977 |
|
SU620234A1 |
| Телематический прибор | 2019 |
|
RU2736321C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Многоканальный регулятор | 1986 |
|
SU1388840A1 |