следует увеличить или уменьшить установочный зазор. .Добиваются получения равенства Sicp 0, которое свидетельствует о том, что требуемая величина зазора установлена. Находят величину $2 Ui + Lfe. которая формируется на выходе блока 9 сложения, на входы которого поступают напряжения Ui и IJ2. На третий вход блока 9 сложения глодается напряжение от источника 19 опорного напряжения. Выделяют постоянно составляющую величины S2 - S2cp с
помощью интегратора 10. Сигнал интегратора 10 является управляющим для управляемого стабилизатора 1 тока, с помощью которого изменяют величину мощности источника 2 света. Величина S2cp поддерживается таким образом неизменной. С помощью фильтра 15 высоких частот выделяют переменную составляющую Si - Si , по которой судят о виброперемещениях контролируемой поверхности. 4 ил. 1 з.п. ф-лы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения расстояний до объекта | 1990 |
|
SU1779918A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК | 2005 |
|
RU2292525C1 |
| Способ измерения расстояний до объекта и устройство для его осуществления | 1990 |
|
SU1779919A1 |
| Оптический датчик | 1989 |
|
SU1753267A1 |
| Волоконно-оптический преобразователь | 1990 |
|
SU1747896A1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ФОРМЫ ИМПУЛЬСОВ СВЕРХБОЛЬШИХ ТОКОВ | 1998 |
|
RU2158428C2 |
| Фотометрический дискриминатор | 1990 |
|
SU1778526A1 |
| Система для исследования деформаций лопаток турбомашин | 1990 |
|
SU1775620A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2029429C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПОВЕРХНОСТИ | 1993 |
|
RU2044270C1 |

Использование: изобретение относится к области .измерительной техники и может быть использовано для измерения виброперемещений бесконтактным способом. Сущность: вблизи от контролируемой поверхности 6 располагают осветительный световод 3, связанный с источником света 2, первый и второй неравноудаленные от контролируемой поверхности приемные световоды 4 и 5, связанные с первым и вторым фотоприемниками 7 и 8 соответственно. Измеряют сигналы Ui и Ua первого и второго фотоприемников 7 и 8 соответственно. Находят величину S U2 - Ut, которая формируется на выходе блока 11 вычитания. Фильтром 16 нижних частот выделяют постоянную составляющую сигнала Si - Sicp. по знаку величины Sicp, который определяют по нуль-органу 17 или блоку световой индикации 14, судят о том. - е ел с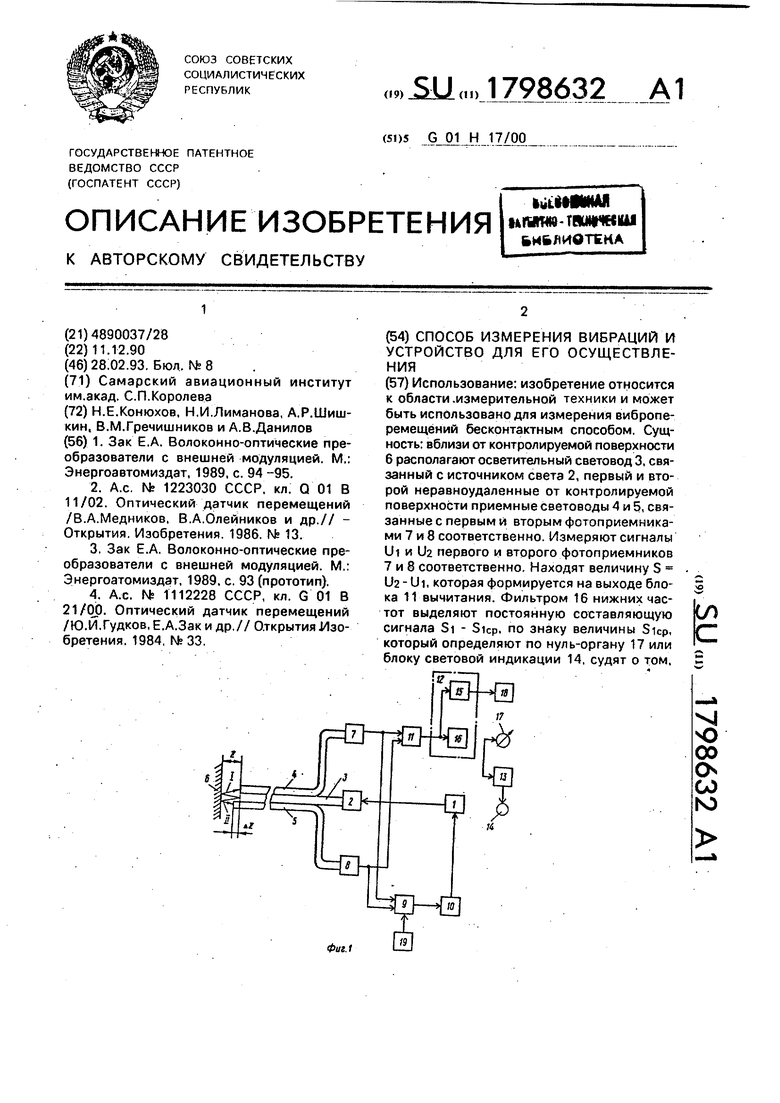
Изобретение относится к области измерительной техники и может быть использовано для измерения виброперемещений бесконтактным способом.
Целью изобретения является увеличение точности измерения.
Поставленная цель достигается тем, что в известном способе, заключающемся в том, что через осветительный световод освещает контролируемую поверхность, принимают отраженный от контролируемой поверхности световой поток двумя приемными световодами, неравноудаленными от контролируемой поверхности, измеряют мощности EV и Е2 отраженного светового потока соответственно на выходах первого и второго приемных световодов, определяют вибрацию контролируемой поверхности, согласно изобретению, путем контроля расстояния между световодами и контролируемой поверхностью определяют сигнал Si, равный разности величин Е2 и EI, выделяют постоянную составляющую Sicp сигнала $2, определяют знак постоянной составляющей Sicp, с учетом знака Sicp итерационно изменяют расстояние между световодами и контролируемой поверхностью до выполнения условия Step 0, определяют сумму $2 величин EI и Е2. выделяют постоянную составляющую Sicp сигнала S2, итерационно изменяют мощность падающего на контролируемую поверхность света до выполнения условия S2cp const, выделяют переменную составляющую 51 сигнала Si, по которой судят о вибрации контролируемой поверхности.
Устройство для измерения вибраций, содержащее последовательно соединенные управляемый стабилизатор тока, источник света и осветительный светов од, приемный световод, связанный с фотоприемником, блок дифференцирования- и регистратор, вход которого подключен ко второму входу блока дифференцирования, согласно изобретению, снабжено последовательно соединенными вторым приемным световодом,
вторым фотоприемником, блоком сложения
и интегратором, выход которого подключен
к входу управляемого стабилизатора тока,
источником опорного напряжения, подключенным к второму входу блока сложения, нуль-органом и компаратором, подключенным к первому выходу блока дифференцирования, блоком световой индикации,
подключённым к выходу компаратора, и блоком вычитания, вход которого подключен к входу блока дифференцирования, причем выход первого фотоприемника подключен к первому входу блока вычитания и к третьему входу блока сложения, выход второго фотоприемника подключен также ко второму входу блока вычитания, а торцы приемных световодов нерэвноудале- ны от контролируемой поверхности.
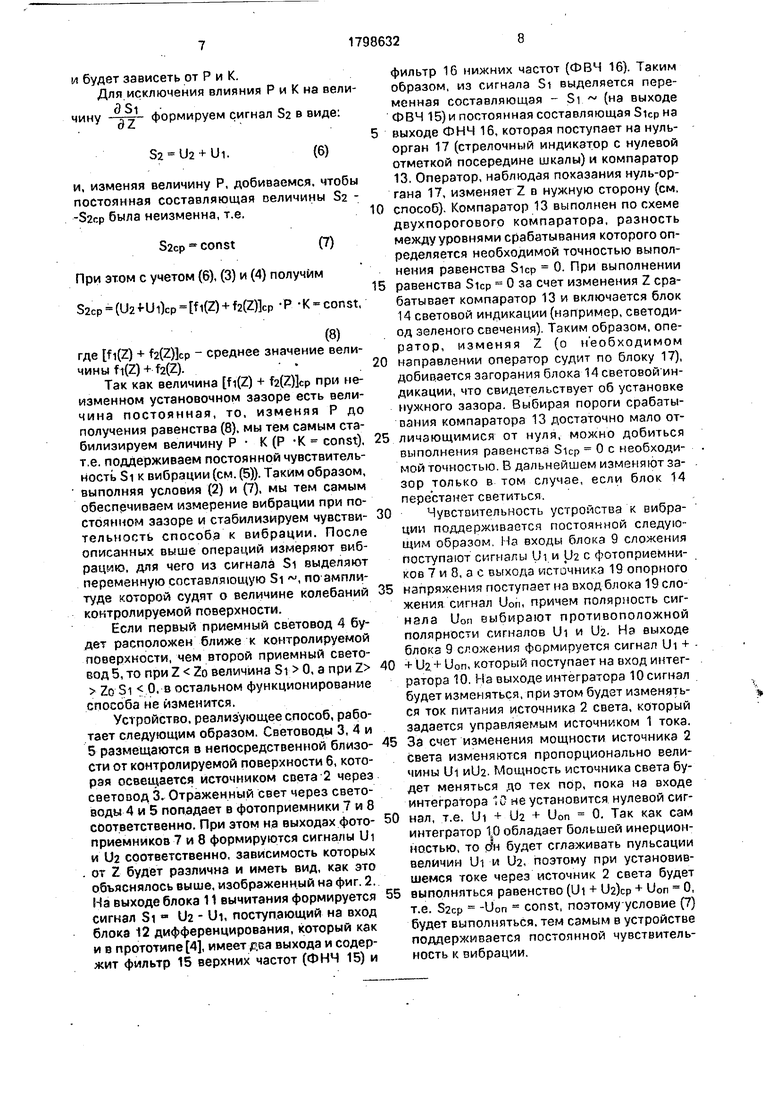
На фиг. 1 изображена структурная схема устройства реализующего способ. Устройство содержит последовательно соединенные управляемый стабилизатор 1 тока, источник 2 света и осветительный
световод 3. Устройство содержит также пер- вы й и второй приемные световоды 4 и 5, неравноудаленные от контролируемой поверхности 6 и связанные соответственно с ними первый и второй фотоприемники 7 и 8.
Устройство содержит также последовательно соединенные блок 9 сложения, первый вход которого подключен к выходу фотоприемника 8, и интегратор 10, последовательно соединенные блок 11 вычитания,
блок 12 дифференцирования, компаратор 13, подключенный к первому выходу блока 12 дифференцированиями блок 14 световой индикации. Блок 12 дифференцирования содержит фильтр 15 верхних частот и фильтр
16 нижних частот. Входы фильтров 15 и 16 соединены вместе и образуют вход блока дифференцирования. Выход фильтра 16 нижних частот является первым выходом блока 12 дифференцирования, к которому
также подключен нуль-орган 17. Выход
фильтра 15 верхних частот является вторым выходом блока дифференцирования, к которому подключен регистратор 18. В устройстве имеется также источник 19 опорного напряжения, подключенный ко второму вхо- ду блока 9 сложения, к третьему входу которого подключен фотоприемник 7. Первый и второй входы блока 11 вычитания подключены к фотоприемнику 7 и 8 соответственно, а. выход интегратора 10 соединен с входом управляемого стабилизатора 1 тока.
Способ осуществляется следующим образом.
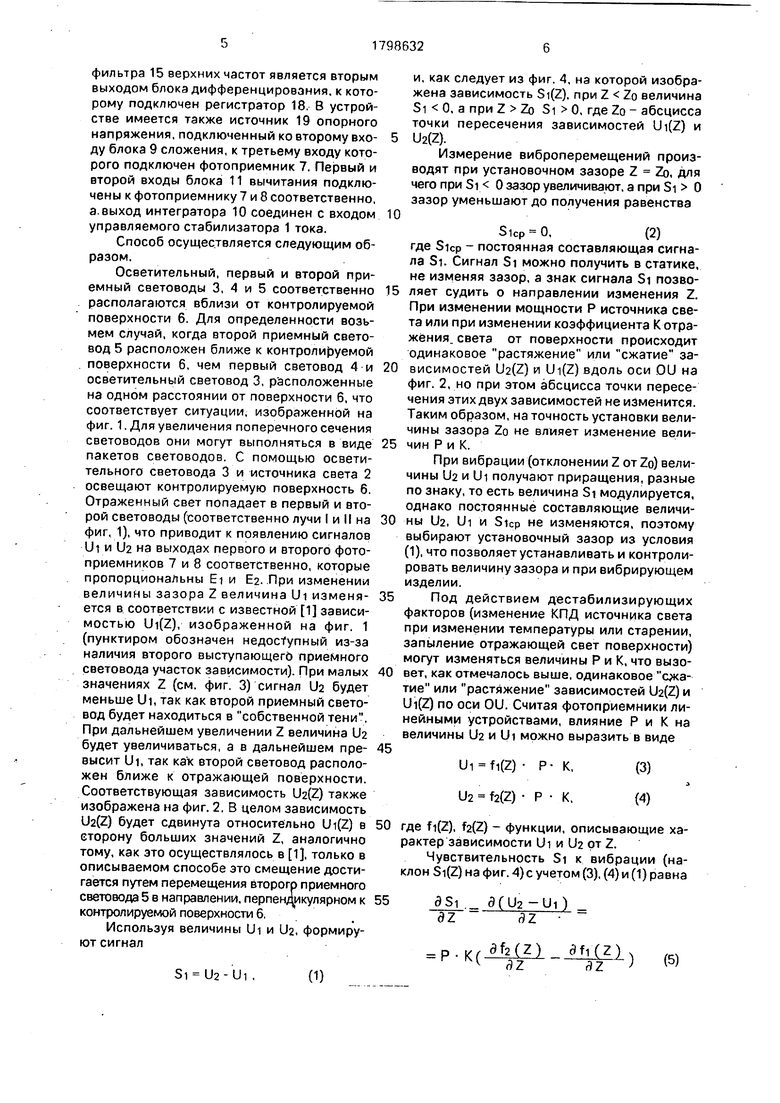
Осветительный, первый и второй приемный световоды 3, 4 и 5 соответственно располагаются вблизи от контролируемой поверхности 6. Для определенности возьмем случай, когда второй приемный световод 5 расположен ближе к контролируемой поверхности 6, чем первый световод 4 и осветительный световод 3, расположенные на одном расстоянии от поверхности 6, что соответствует ситуации, изображенной на фиг. 1. Для увеличения поперечного сечения световодов они могут выполняться в виде пакетов световодов. С помощью осветительного световода 3 и источника света 2 освещают контролируемую поверхность 6. Отраженный свет попадает в первый и второй световоды (соответственно лучи I и II на фиг, 1), что приводит к появлению сигналов Ui и U2 на выходах первого и второго фотоприемников 7 и 8 соответственно, которые пропорциональны EI и Еа. При изменении величины зазора Z величина Ui изменя- ется в соответствии с известной 1 зависимостью Ui(Z), изображенной на фиг. 1 (пунктиром обозначен недоступный из-за наличия второго выступающего приемного световода участок зависимости). При малых значениях Z (см. фиг. 3) сигнал U2 будет меньше Ui, так как второй приемный световод будет находиться в собственной тени. При дальнейшем увеличении Z величина 1)2 будет увеличиваться, а в дальнейшем пре- высит Ui, так как второй световод расположен ближе к отражающей поверхности. Соответствующая зависимость U2(Z) также изображена на фиг. 2, В целом зависимость UafZ) будет сдвинута относительно Ui(Z) в еторону больших значений Z, аналогично тому, как это осуществлялось в 1. только в описываемом способе это смещение достигается путем перемещения второго приемного световода 5 в направлении, перпендикулярном к контролируемой поверхности б,
Используя величины Ui и U2, формируют сигнал
Si U2-Ui.
(1)
и, как следует из фиг. 4, на которой изображена зависимость Si(Z), при Z ZQ величина Si 0, а при Z Zo Si 0, где Zo - абсцисса точки пересечения зависимостей Ui(Z) и U2(Z).
Измерение виброперемещений производят при установочном зазоре Z Zo, для чего при Si 0 зазор увеличивают, а при Si О зазор уменьшают до получения равенства
Sicp 0,(2) где Sicp - постоянная составляющая сигнала SL Сигнал Si можно получить в статике, не изменяя зазор, а знак сигнала Si позволяет судить о направлении изменения Z. При изменении мощности Р источника света или при изменении коэффициента К отражения, света от поверхности происходит одинаковое растяжение или сжатие зависимостей U2(Z) и Ui(Z) вдоль оси OU на фиг. 2, но при этом абсцисса точки пересечения этих двух зависимостей не изменится. Таким образом, на точность установки величины зазора Zo не влияет изменение величин Р и К.
При вибрации (отклонении Z от Zo) величины U2 и Ui получают приращения, разные по знаку, то есть величина Si модулируется, однако постоянные составляющие величины U2, Ui и Sicp не изменяются, поэтому выбирают установочный зазор из условия (1), что позволяет устанавливать и контролировать величину зазора и при вибрирующем изделии.
Под действием дестабилизирующих факторов (изменение КПД источника света при изменении температуры или старении, запыление отражающей свет поверхности) могут изменяться величины Р и К, что вызовет, как отмечалось выше, одинаковое рка- тие или растяжение зависимостей U2(Z) и Ui(Z) по оси OU. Считая фотоприемники линейными устройствами, влияние Р и К на величины U2 и Ui можно выразить в виде
Ui fi(Z) Р- К, U2 f2(Z) Р К.
(3)
(4)
где fi(Z), f2(Z) - функции, описывающие характер зависимости Ui и U2 от Z.
Чувствительность Si к вибрации (наклон Si(Z) на фиг. 4) с учетом (3), (4) и (1) равна
aSi 3(U2 -Ui )
dZ
.Kr dMzj afiXzb
Ч Д7Д7 )
t)Z
az
(5)
и будет зависеть от Р и К.
Для исключения влияния Р и К на вели л
чину ду формируем сигнал S2 в виде:
Sz-Ua + Ui.
(6)
и, изменяя величину Р, добиваемся, чтобы постоянная составляющая величины Sa - -$2ср была неизменна, т.е.
Sacp const(7) При этом с учетом (6), (3) и (4) получим S2cp (U2fUi)(Z) + f2(Z)cp -Р -К - const,
(8)
где fi(Z) + f2(Z)cp - среднее значение величины fi(Z) -t-f2(Z).
Так как величина fi(Z) + f2(Z)Cp при неизменном установочном зазоре есть величина постоянная, то, изменяя Р до получения равенства (8), мы тем самым стабилизируем величину Р К(Р -К const), т.е. поддерживаем постоянной чувствительность Si к вибрации (см. (5)). Таким образом, выполняя условия (2) и (7), мы тем самым обеспечиваем измерение вибрации при постоянном зазоре и стабилизируем чувствительность способа к вибрации. После описанных выше операций измеряют вибрацию, для чего из сигнала Si выделяют переменную составляющую Si , по амплитуде которой судят о величине колебаний контролируемой поверхности.
Если первый приемный световод 4 будет расположен ближе к контролируемой поверхности, чем второй приемный световод 5, то при Z 2о величина Sr 0, а при Z Zo Si 0. в остальном функционирование способа не изменится.
Устройство, реализующее способ, работает следующим образом. Световоды 3, А и 5 размещаются в непосредственной близости от контролируемой поверхности 6, которая освещается источником света 2 через световод 3. Отраженный свет через световоды 4 и 5 попадает в фотоприемники 7 и 8 соответственно. При этом на выходах фотоприемников 7 и 8 формируются сигналы Ui и Ua соответственно, зависимость которых . от Z будет различна и иметь вид, как это объяснялось выше, изображенный на фиг. 2. На выходе блока 11 вычитания формируется сигнал Si - U2 - Ui, поступающий на вход блока 12 дифференцирования, который как и в прототипе 4, имеет деа выхода и содержит фильтр 15 верхних частот (ФНЧ 15) и
фильтр 16 нижних частот (ФВЧ 16). Таким образом, из сигнала Si выделяется переменная составляющая - Si (на выходе ФВЧ 15) и постоянная составляющая Sicp на
выходе ФНЧ 16, которая поступает на нуль- орган 17 (стрелочный индикатор с нулевой отметкой посередине шкалы) и компаратор 13, Оператор, наблюдая показания нуль-органа 17, изменяет в нужную сторону (см.
способ). Компаратор 13 выполнен по схеме двухпорогового компаратора, разность между уровнями срабатывания которого определяется необходимой точностью выполнения равенства Sicp 0. При выполнении
равенства Sicp 0 за счет изменения Z срабатывает компаратор 13 и включается блок 14 световой индикации (например, светоди- од зеленого свечения). Таким образом, оператор, изменяя Z (о необходимом
направлении оператор судит по блоку 17), добивается загорания блока 14 световой ин- дикации, что свидетельствует об установке нужного зазора. Выбирая пороги срабатывания компаратора 13 достаточно мало отличзющимися от нуля, можно добиться выполнения равенства Sicp 0 с необходимой точностью. В дальнейшем изменяют зазор только в том случае, если блок 14 перестанет светиться.
Чувствительность устройства к вибрации поддерживается постоянной следующим образом. На входы блока 9 сложения поступают сигналы Ui и Lh с фотоприемников 7 и 8, а с выхода источника 19 опорного
напряжения поступает на вход блока 19 сложения сигнал Uorii причем полярность сигнала Uon выбирают противоположной полярности сигналов Ui и U2. На выходе блока 9 сложения формируется сигнал Ui +
+ LJ2.+ Uon, который поступает на вход интегратора 10. На выходе интегратора 10 сигнал будет изменяться, при этом будет изменяться ток питания источника 2 света, который задается управляемым источником 1 тока.
За счет изменения мощности источника 2 света изменяются пропорционально величины Ui nU2. Мощность источника света будет меняться до тех пор, пока на входе интегратора 1С не установится нулевой сигнал, т.е. Ui + Ua + Uon 0. Так как сам интегратор 1р обладает большей инерционностью, то будет сглаживать пульсации величин Ui и U2, поэтому при установившемся токе через источник 2 света будет
выполняться равенство (Ui + Ua)cp + Uon О, т.е. S2cp -Uon const, поэтому-условие (7) будет выполняться, тем самым в устройстве поддерживается постоянной чувствительность к эибрации.
Таким образом, после установки оператором нужного зазора и спустя время, определяемое инерционностью интегратора 10, устройство полностью работоспособно, а на вход регистратора 18 поступает переменная составляющая сигнала5i - Si , амплитуда которой строго пропорциональна амплитуде колебаний поверхности 6.(
В качестве фотоприемников 7 и 8 могут быть использованы устройства, описанные в 5, схемы других блоков описаны, например, в 6. В качестве регистратора 18 может быть использован вольтметр (данные о вибрации не запоминаются), магнитофон или самописец.
Для получения максимально высоких метрологических характеристик, в том числе высокой линейности, конструктивные размеры и величину AZ следует выбирать таким образом, чтобы точка пересечения зависимостей f2(Z) и fi(Z) находилась на линей- ных участках этих зависимостей, и абсолютные величины наклоновд S1 д $2 ,-,-, .. j , 7 были равны. Последнее условие удобно выполнять, изменяя коэффициенты преобразования фотоприемников 7 и 8.
Величину Don следует выбирать таким образом, чтобы при установленном зазоре и номинальном коэффициенте отражения от поверхности 6 величина тока через источник 2 света составляла 50-80% от максимально допустимой. Желательно предусмотреть ограничение максимального тока, отдаваемого блоком 1 в источник 2 света, что исключит случайное выгорание источника 2 света.
Сдвиг зависимостей f2(Z) и Fi(Z) относительно друг друга можно реализовать аналогично 1 или путем задания величины AZ. Точная установка нужного зазора (причем возможна установка зазора при вибрирующей контролируемой поверхности), контроль величины установочного зазора непосредственно при измерении вибрации, увеличение чувствительности способа к вибрации (вибрацию чувствуют оба фотоприемника по сравнению с 3, в котором один из фотоприемников не чувствует вибрацию) приводит к увеличению точности измерения вибрации. Кроме этого, снижено слияние фоновой засветки фотоприемников на точность установки зазора, так как в процессе формирования сигнала Si, по которому устанавливают зазор, происходит вычитание сигналов, наводимых фоновой засветкой.
Данный способ позволяет легко автоматизировать установку нужного зазора при автоматизации виброизмерений, так, наличие четкой зависимости Si от зазора (при Z Zo Si 0, при Z Zo S2 0) позволяет использовать автоматические устройства (на основе электронных регуляторов и элек- 5 тромагнита) для установки и поддерживания нужной величины установочного зазора.
Формула изобретения
5 выделяют постоянную составляющую Step сигнала $2, определяют знак постоянной составляющей Sicp, с учетом знака SiCp итера- ционно изменяют расстояние между световодами и контролируемой поверхно0 сти до выполнения условия Step О, определяют сумму $2 величин Е2 и EL выделяют постоянную составляющую S2cp сигнала $2, итерационно изменяют мощность падающего на контролируемую поверхность света
5 до выполнения условия $2ср const, выделяют переменную составляющую Siv сигнала Si по которой судят о вибрации контролируемой поверхности.
0 содержащее последовательно соединенные управляемый стабилизатор тока, источник света и осветительный световод, приемный световод, связанный с фотоприемником, блок дифференцирования и регистратор,
5 вход которого подключен к второму выходу блока дифференцирования, отличающееся тем, что, с целью увеличения точности измерения и контроля расстояния между световодами и контролируемой поверхно0 стью непосредственно в процессе измерения, оно снабжено последовательно .соединенными вторым приемным световодом, вторым фотоприемником, блоком сложения и интегратором, выход которого
5 подключен к входу управляемого стабилизатора тока, источником опорного напряжения, подключенным к второму входу блока сложения, нуль-органом и компаратором, подключенным к первому выходу блока дифференцирования, блоком световой индикации, подключенным к выходу компаратора, и блоком вычитания, выход которого подключен к входу блока дифференцирования, причем выход первого фотоприемника подключен к первому входу блока вычитания и
к третьему входу блока сложения, выход второго фотоприемника подключен также к второму входу блока вычитания, а торцы приемных световодов неравноудалены от контролируемой поверхности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зак Е.А | |||
| Волоконно-оптические преобразователи с внешней модуляцией | |||
| М.: Энергоавтомиздат, 1989, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| А.с | |||
| Оптический датчик перемещений | 1983 |
|
SU1223030A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Оптический датчик перемещений /В.А.Медников, В.А.Олейников и др.// - Открытия | |||
| Изобретения | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Насос | 1917 |
|
SU13A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Зак Е.А | |||
| Волоконно-оптические преобразователи с внешней модуляцией | |||
| М.: Энергоатомиздэт, 1989, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| А.С | |||
| Оптический датчик перемещений | 1982 |
|
SU1112228A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Оптический датчик перемещений /Ю.Й.Гудков, Е.А.Зак и др.// Открытия .Изобретения | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
