Изобретение относится к области автоматики и вычислительной техники и может быть использовано в большебаэовых пассивных радиолокационных системах для вычислен ия взаимной корреляционной функции сигналов постановщиков активных помех.
Целью изобретения является повышение точности вычисления взаимной корреляционной функции.
На чертеже приведена структурная схема коррелятора.
Коррелятор содержит первый 1 и второй 2 блоки умножения, управляемую линию задержки 3, фазовращатель 4, первый 5 и второй б интеграторы, первый 7, второй 8 и третий 9 регистры хранения, первый 10 и второй 11 квадраторы, первый 12, второй 13 и третий 14 умножители, первый 15, второй 16 и третий 17 сумматоры.
Элементы корреляции соединены следующим образом.
Второй вход коррелятора соединен с входом управляемой линии задержки 3, выход которой соединен с вторым входом второго блока 2 умножения и с вторым входом первого блока 1 умножения, первый вход которого соединен с первым входом коррелятора и с входом фазовращателя 4, выход которого соединен с первым входом второго блока 2 умножения, выход которого соединен с входом второго интегратора 6, выход которого соединен с входом второго квадратора 11 и с первым входом второго умножителя 13, второй вход которого соеди- нен с выходом второго регистра хранения 8, а выход - с вторым входом второго сумматора, первый вход которого соединен с выходом первого умножителя 12, а выход - с первым входом третьего умножителя 14, второй вход которого соединен с выходом третьего регистра хранения 9, а выход - с вторым входом третьего сумматора 17, выход которого соединен с выходом коррелятора, а первый вход - с выходом первого сумматора 15, второй вход которого соединен с выходом второго квадратора 11, а первый вход - с выходом первого квадратора 10, вход которого соединен с первым входом первого умножителя 12 и с выходом первого интегратора 5, вход которого соединен с выходом первого блока 1, а выход первого регистра хранения 7 соединен с вторым входом первого умножителя 12.
Коррелятор работает следующим образом.
Изложим математический алгоритм функционирования заявленного устройства.
5
0
5
0
5
0
Предположим, что в течение временного интервала Т на оба входа коррелятора поступают сигналы
yi(t)S(t-D) m(t),(1)
У2(0 S(t) + n2(t),
где S(t) - входной сигнал постановщика активных помех;
ni(t)rt2(t).- аддитивные шумы, р - относительная фаза,
D - известное время задержки. Предположим также, что S(t), rn(t), n2(t) независимы, с нулевым матожиданием и что время наблюдения Т значительно превышает время корреляции. Относительная фаза будет предполагаться случайной с плотностью вероятности Р (р} , симметричной относительно известного среднего р $и определяется как
Р (у,) (.0).
2 л 10/я
- к / я,
(2)
где 1о (Я) - модифицированная функция Бесселя нулевого порядка. Такая функция вероятности выбрана так, чтобы с помощью изменения параметра Я можно было исследовать влияние изменения фазы на точность оценки задержки.
Так как время наблюдения конечно, то реализацию принимаемых сигналов можно представить рядами Фурье. При утверждении, что реализация содержит только положительные частоты и предположении того, что ошибка за счет конечного времени наблюдения незначительна, можно записать
, Др,(к)
yi(t)
(3)
где
Ri(k) -L / у, (t) e JftJkt dt; Vj О
(4)
(5)
35
45
Пусть R - вектор Фурье-коэффициентов представлен в матричной форме
R(1)
R(N)
R ЭД (6)
Так как время наблюдения значительно больше времени корреляции процесса, то следует, что Фурье-коэффициенты, соответствующие различным частотам, не коррели- рованы.
Таким образом, матрица ковариации от R принимает блок-диагональную форму
-л
Q}(1)доподобная оценка DMB есть то значение D,
которое максимизирует выражение пN QR . h(D) / (в-qi) + 2, х
.- х R(k)T QR(k) 1 R(k) p. (13) QR (N) Подставляя (10) и пренебрегая членами, независимыми от D, получаем, что бмв макси- где QR(I) обозначает матрицу ковариации от -мизирует выражение R(k) и имеет вид ш п Ы
1ПI|(D) /Я.С08(0-р) +
10
-п
ЛGn(K) Gi2(K) lo. (KJ 622 (К) (8)
-п
где
Ri(k)R2(k) C(k) p-j() + Gi2(k)J 1-C(k)e
Gij(k)(k).RKk, 4GU(k);i,j-1,2 (9) 15 + Щ xeX d где () - комплексное сопряжение, Е - ма- .
тожидание. Подставляя (5) в (9), получаем
(14)
QR(k)4
Gss(k) + Gnnn2(k) Gss(l) в где од величина кваДратИЧНОЙ СВЯЗИ, ОПGss(k)e (0kD f) Gss(k) +Gn2n2(k)20ределенная на частоте ft
-C(k) IGl2(k)l2/tGl1(k)G22(k)
(Ю)Выражение (14) может быть записано в еле- где Gss(k), Gmm, Сп2П2 обозначают авто-дующем виде
спектральную плотность мощности сигнала „.. Ч. Г1 , , , Ј А
5«ишумовп.1(1)йП2((1). 25l exptAcos - + R/ GiatkJx
Так как Фурье-коэффициенты получа--Y/AD
ются с помощью линейных операций надх 0;g(k) e /cos (а - р) d уз (15)
гауссовскими случайными процессами, то .где
следует, что коэффициенты Фурье есть ком плексные гауссовские случайные переменные и что их совместная функция плотности определяется как
. ,p)-1
W
NniQR(|)l k 1
/Я.С08(0-р) +
-п
.где
30
Gi2(k) Ri(k)R2(k)
Wg(k) т
1
. C(k) IGi2(k)T
Jf
35 а агд Г 2pi2(k) Wg(k) е(
(18)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство демодуляции фазоманипулированных сигналов | 1989 |
|
SU1626439A2 |
| ПЕЛЕНГАТОР | 2001 |
|
RU2190235C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ | 1992 |
|
RU2032917C1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| Устройство для определения импульсной переходной функции | 1985 |
|
SU1345175A1 |
| Многоканальный автокоррелятор | 1989 |
|
SU1718242A1 |
| Система передачи и приема информации с многоосновным кодированием | 1989 |
|
SU1642590A1 |
| Цифровой коррелятор | 1990 |
|
SU1824642A1 |
| Цифровой измеритель мощности | 1979 |
|
SU828102A1 |
| Коррелятор | 1977 |
|
SU693393A2 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в болыиебазовых пассивных радиолокационных системах для вычисления взаимной корреляционной функции сигналов постановщиков активных помех. Цель изобретения - повышение точности вычисления взаимной корреляционной функции. Для этого в коррелятор, содержащий два блока умножения, фазов- ращатель, два интегратора и управляемую линию задержки дополнительно вводятся три регистра хранения, три умножителя, два квадратора, три сумматора, что позволило за счет учета закона распределения случайного сдвига фаз принимаемых сигналов повысить точность вычисления взаимной корреляционной функции. 1 ил.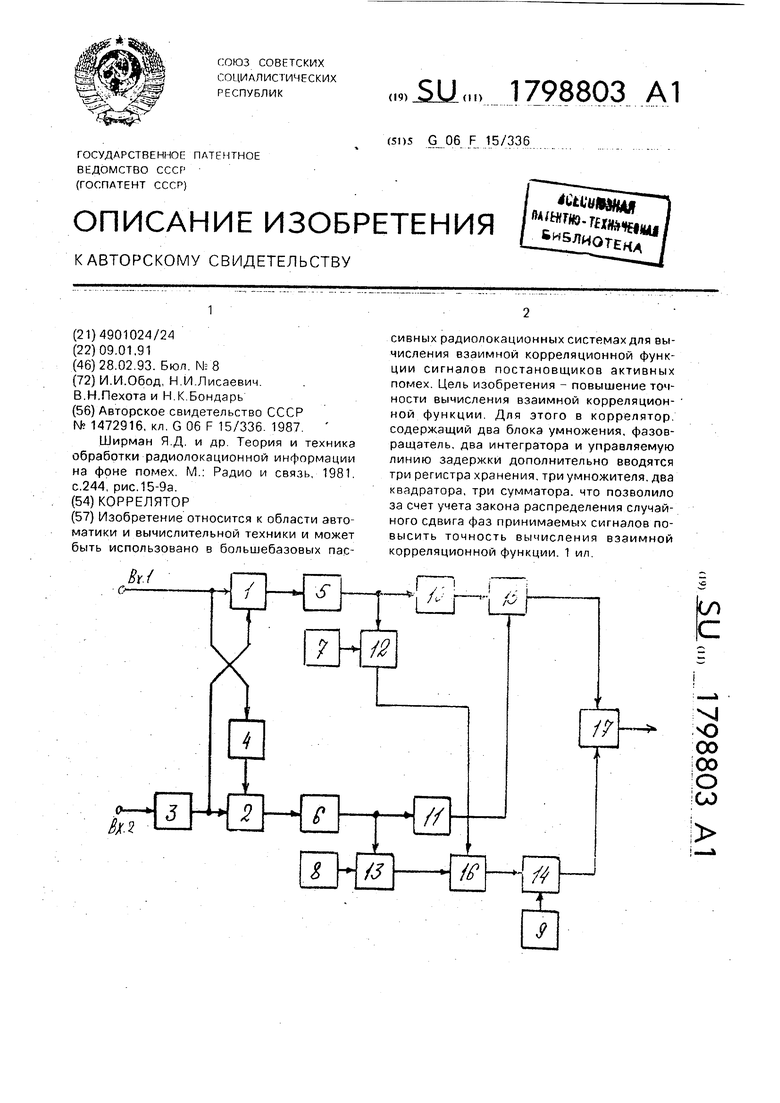
г N т т 1или, что то же самое так как Т велико
х ехр Г- 2 R(k)T QR 1 (k) Rfk)| (11)л со
L Jh(D) / exp Я cos (-6)-I-2 Т /Gi2(f)x
где (Т) обозначает комплексное сопряжениелл -п о
и транспортирование вектора.
Однако P(R/D) можно записать как
xWg(t)e j2JrfDdficos(«-v5)dy (1 Произведя определенные вычисления и и менив порядок (19), можно записать
-У
P(R/D) / Р (R/D, р) P(p)
-n Отсюда
P(R/D)
1
1
+ (sin# + 2T fRi29 (D)l x х sin a) sin $ d p,(20) где Ri29(D) - обобщенная корреляция, опре- 50 деляемая как
Ri29 Gi2(f)V(Oe i27nDdf. (21)
о
Выполнив интегрирование, мы получаем h(D) в + 2J lRi2 9 (D)I cos «f + + Я sin + 2 Т |Ri2 9 (D) I sin } (22)
(Я) П |QR(R)| (К 0
nN x / exp Я cos (p-Q)- 2 R(k) QRC) -n 7
xR(k)d..(12)
Известно (З), что максимально правде- 55 подобная оценка определяется как величина D, которая максимизирует условную
плотность P(R/D). Так как QRJ,) не зависит от Так как °М монотонная функция, то выра- D (12), то получаем, что максимально прав- жение (22) эквивалентно максимизации следующего выражения
xWg(t)e j2JrfDdficos(«-v5)dy (19) Произведя определенные вычисления и изменив порядок (19), можно записать
45 1(°) / ехр {Я cos + 2 Т IR12 9 (D/cos а) х
п
+ (sin# + 2T fRi29 (D)l x х sin a) sin $ d p,(20) где Ri29(D) - обобщенная корреляция, опре- 50 деляемая как
Ri29 Gi2(f)V(Oe i27nDdf. (21)
о
Выполнив интегрирование, мы получаем h(D) в + 2J lRi2 9 (D)I cos «f + + Я sin + 2 Т |Ri2 9 (D) I sin } (22)
55
I2(D) - A cos 0 + 2 Т IR12 9 (D) i cos «f +
+ Я sin (9+ 2 Т |Ri29(D)/sinaf(23) которое эквивалентно максимизации
I(D) i /COS в Re R12 g (D) + Sin в Mx
(D)}+ Ri29(D)|2(24) Данное выражение и является математическим алгоритмом работы заявленного коррелятора. .
Как следует из прототипа на выходе первого интегратора 5 получается (D), а на выходе второго интегратора 6 - 1м Ri2g(D). Выходные значения интеграторов 5 и 6 возводятся в квадрат в квадратах 10 и 11 соответственно и суммируются в сумматоре 15 на выходе которого и получается следующий результат lRi29(D)2. В регистре 7 хранится значение cos в, которое умножается в умножителе 12 на значение (D), поступающее с выхода первого интегратора 5. В регистре 8 хранится значение sin в, которое умножается в умножителе 13 на значение (О), поступающее с выхода интегратора 6. Выходные значения умножителя 12 и 13 суммируются в сумматоре 16, выходное значение которого умножается на у в умножителе 14 на значение,
хранящееся в регистре 9. Выходные значения сумматора 15 и умножителя 14 суммируются в сумматоре 17 на выходе которого и получается выходной результат определённый по (24). Выбор конкретной величины Я определялся на основании априорных данных об плотности распределения случайной фазы. В зависимости от конкретно выбранной величины X будет определяться то априорное значение, которое участвует в формировании выходной величины.
Предлагаемое техническое решение направлено на улучшение конкретных технических характеристик коррелятора. Поэтому сравнительный анализ проведем с базовым объектом в качестве которого выберем прототип, характеризующийся аналогичным способом построения.
Как следует из описания работы и функционирования заявляемого устройства в нем, благодаря введению дополнительных элементов удается учитывать случайный фазовый сдвиг принимаемых сигналов при вы- числении взаимной корреляционной функции и, следовательно, повысить точность вычисления взаимной корреляционной функции в заявленном устройстве по
сравнению с базовым объектом за счет учета случайной фазовой составляющей. Плотность распределения (а следовательно, и параметр А) может быть определена в конкретной позиции по результатам экспериментальных исследований.
Формула изобретения Коррелятор, содержащий два блока умножения, два интегратора, фазовращатель и линию задержки, информационный вход
которой является первым информационным входом коррелятора, вторым информационным входом которого является первый вход первого блока умножения, соединенный с входом фазовращателя, выход которого
подключен к первому входу второго блока умножения, выход которого соединен с входом первого интегратора, выход,линии задержки подключей к второму входу второго блока умножения и к второму входу первого
блока умножения, выход которого соединен с входом второго интегратора, отличающийся тем, что, с целью повышения точности, в него введены два квадратора, три умножителя и три сумматора, причем
выход первого интегратора через первый квадратор соединен с первым входом первого сумматора, а через первый умножитель - с первым входом второго сумматора, выход которого через второй умножитель соединен с первым входом третьего сумматора, выход второго интегратора через третий умножитель подключен к второму входу второго сумматора, а через второй квадратор - к второму входу первого сумматора, выход которого соединен с вторым входом третьего сумматора, выход которого является выходом коррелятора.
| Устройство для вычисления корреляционной функции | 1987 |
|
SU1472916A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Ширман Я.Д | |||
| и др | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| М.: Радио и связь, 1981 | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
