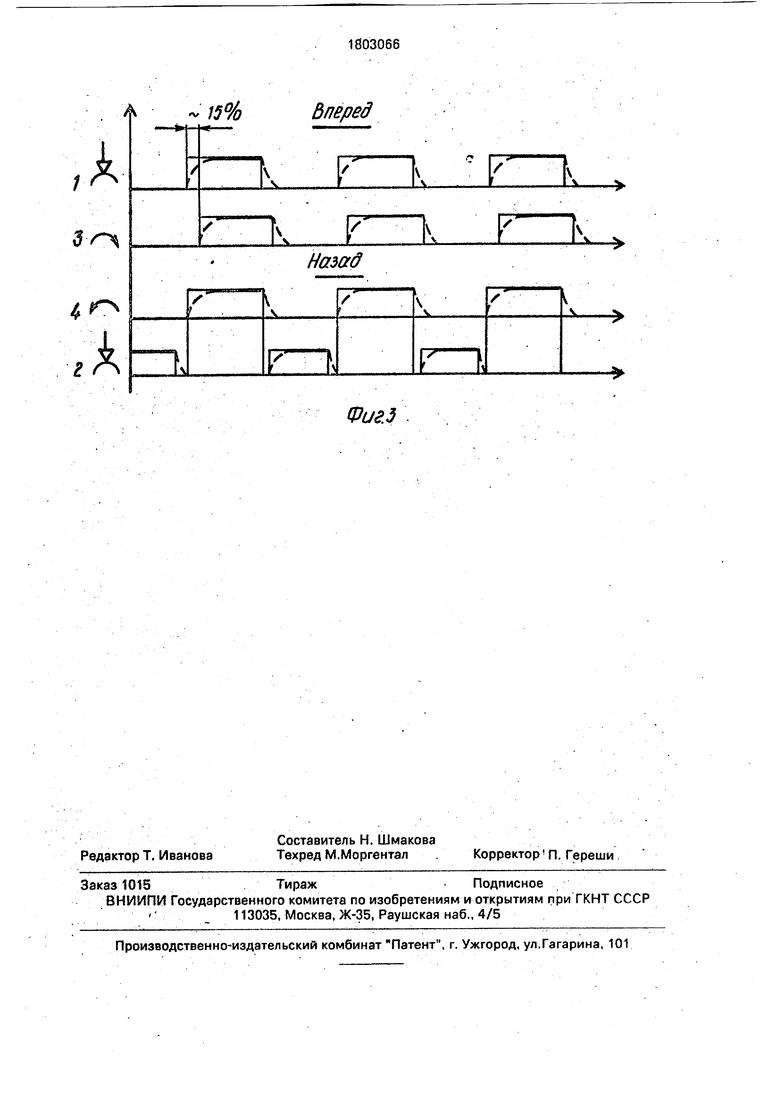
тели мощности 34 и 35. При этом запускается генератор импульсов 27 (за счет слияния сигнала по входу сброса) и на вход счетчика 28 подается тактовая последовательность импульсов установленной частоты. Сигналы с выходов счетчика 28. 2°.,.2а подаются на адресные входы А0.,.А6 программируемого запоминающего устройства PROM 29. При этом на его выходах 1 и 3 формируются в соответствии с записанной информацией в первой области его адресного пространства сигналы управления, изображенные на циклограмме, приведенной на фиг.З (ВПЕРЕД), первый из которых предназначен для управления тормозными мембранными коробками 20, а второй - поворотными мембранными коробками 22 по координате X. С выходов усилителей мощности 34 и 35 сигналы поступают на вход электропнев- мопреобразователей 36 и 37, подключенных через пневмодроссели 38 и 39 с помощью пневматических гибких трубопроводов 40 и 41 к вышеуказанным мембранным коробкам. При этом тормозные мембранные коробки 20 прижимают тормозные штоки 16 к ручке 12, образуя жесткую связь поворотной обоймы 14 с ручкой 12. Затем при подаче импульса с небольшой задержкой в поворотные мембранные коробки 22 ручка 12 вместе с обоймой 14 делает поворот и обеспечивает поступательное перемещение толкателя 11 на один шаг вперед. Задержка импульса необходима для исключения обратных рывков микроинструмента.
При переводе переключателя 24 в исходное положение блокируется генератор 27. счетчик 28 сбрасывается в исходное состояние, а управляющие импульсы на выходе блока отсутствуют. При этом мембранные коробки 20 и 22 перестают воздействовать на тормозные штоки 16 и поворотную обойму 14, которая возвращается в исходное состояние под действием пружины 17,
Для обеспечения перемещения толкателя 11 и, соответственно, ползуна 9 на один шаг назад переводят переключатель 24 в левое положение, при этом на выход А7 программируемого запоминающего устройства 29 подается сигнал логического нуля и на его выходах 2 и 4 формируются сигналы управления в соответствии с информацией, записанной во второй области его адресного пространства, изображенные на циклограмме 3, (НАЗАД). Эти сигналы, как и в случае движения вперед, подаются на мембранные коробки 20 и 22 механизма перемещения 13 по координате X. Как видно на циклограмме, сначала подают импульс на поворотную мембранную коробку 22 и она,
воздействуя на обойму 14, поворачивается. Затем подается импульс на тормозную мембранную коробку 20, которая воздействует на штоки 16 и прижимает их к ручке 12. При
5 снятии импульса с мембранных коробок 22 обойма 14 вместе с ручкой 12 под воздействием пружины 17 делает обратный ход. При этом ручка 12 поворачивается и обеспечивает поступательное перемещения толкателя
0 11 на один шаг назад. Для управления по координате Y используется переключатель 25, разрешающий по вторым входам элементов 2 И 42 и 43 прохождение импульсов управления с выходов программируемого
5. запоминающего устройства 29 через элементы 2 ИЛ И 32 и 33 на усилители мощности 44 и 45, управляющие электропневмопреоб- разователями 46 и 47,. подключенные через пневмодроссели 48 и 49 к мембранным ко0 робкам механизма перемещения по координате Y с помощью гибких пневматических трубопроводов 50 и 51.
Таким образом, применение устройства по предлагаемому изобретению позволит
5 повысить точнрсть манипулирования, снизить вибрацию микроинструмента и даст возможно&ть работы с более тонкими структурами клеток и тканей.
0. Формула изобретения
1. Микроманипулятор, содержащий направляющие продольного и поперечного перемещения и установленный в них держатель микроинструмента, связанный через
5 шаговые приводы с блоком дистанционного управления перемещением микроинструмента по двум взаимно перпендикулярным направлениям в горизонтальной плоскости, о т л и ч а ю щи и с я тем, что, с целью
0 повышения точно сти манипулирования, каждый шаговый привод выполнен пневматическим и содержит винтовую пару, включающую толкатель с резьбой на одном конце и ручку перемещения, установленный
5 на последней механизм тонкого дистанционного перемещения, состоящий из поворотной подпружиненной относительно направляющей продольного перемещения обоймы, снабженнойтормозными мембран0 ными коробками и тормозными штоками, установленными между тормозными мембранными коробками и ручкой, а также пово- ротных мембранных коробок, связанных с направляющей продольного перемещения,
5 при этом другой конец толкателя, взаимодействующий с держателем микроинструмента, установлен с возможностью поступательного перемещения в фиксаторе, жестко связанном с направляющей продольного перемещения, а мембранные коробки связаны пневмотрубопроводами с блоком дистанционного управления,
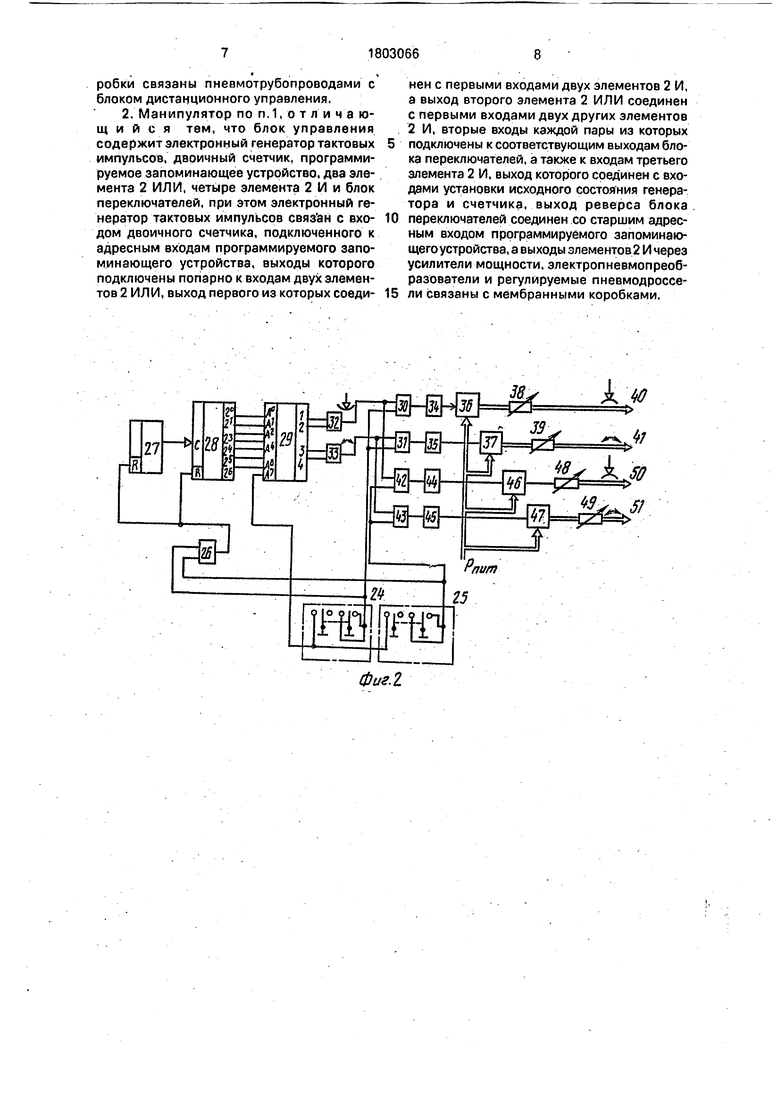
2. Манипулятор по п. 1, о т л и ч а ю- щ и и с я тем, что блок управления содержит электронный генератор тактовых импульсов, двоичный счетчик, программируемое запоминающее устройство, два элемента 2 ИЛИ, четыре элемента 2 И и блок переключателей, при этом электронный генератор тактовых импульсов связан с входом двоичного счетчика, подключенного к адресным входам программируемого запоминающего устройства, выходы которого подключены попарно к входам двух элементов 2 ИЛИ, выход первого из которых соеди
5
нен с первыми входами двух элементов 2 И, а выход второго элемента 2 ИЛИ соединен с первыми входами двух других элементов 2 И, вторые входы каждой пары из которых подключены к соответствующим выходам блока переключателей, а также к входам третьего элемента 2 И, выход которого соединен с входами установки исходного состояния генератора и счетчика, выход реверса блока переключателей соединен со старшим адресным входом программируемого запоминающего устройства, а выходы элементов 2 И через усилители мощности, электропневмопреоб- разователи и регулируемые пневмодроссе- ли связаны с мембранными коробками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программируемый контроллер | 1989 |
|
SU1741100A1 |
| Программатор | 1987 |
|
SU1541669A1 |
| Устройство для формирования последовательностей импульсов | 1989 |
|
SU1653140A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1136123A1 |
| ПРОГРАММНО-ЛОГИЧЕСКОЕ ВРЕМЕННОЕ УСТРОЙСТВО | 2001 |
|
RU2199146C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ФАСОННЫХ ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2014207C1 |
| АППАРАТУРА ДИСТАНЦИОННОГО ВВОДА ДЛЯ ПРОГРАММИРОВАНИЯ ДИСТАНЦИОННЫХ ВЗРЫВАТЕЛЬНЫХ УСТРОЙСТВ СНАРЯДОВ РЕАКТИВНЫХ СИСТЕМ ЗАЛПОВОГО ОГНЯ | 2003 |
|
RU2219488C1 |
| Устройство контроля кода счетчика | 1979 |
|
SU815920A1 |
| СИСТЕМА СВЯЗИ | 1996 |
|
RU2116001C1 |

Фиг.1
ФигЗ
