Изобретение относится к области телевизионной автоматики и может быть применено для установки ТВЭЛ на пластины тепловыделяющей сборки (ТВС).
Целью изобретения является повышение информативности устройства.
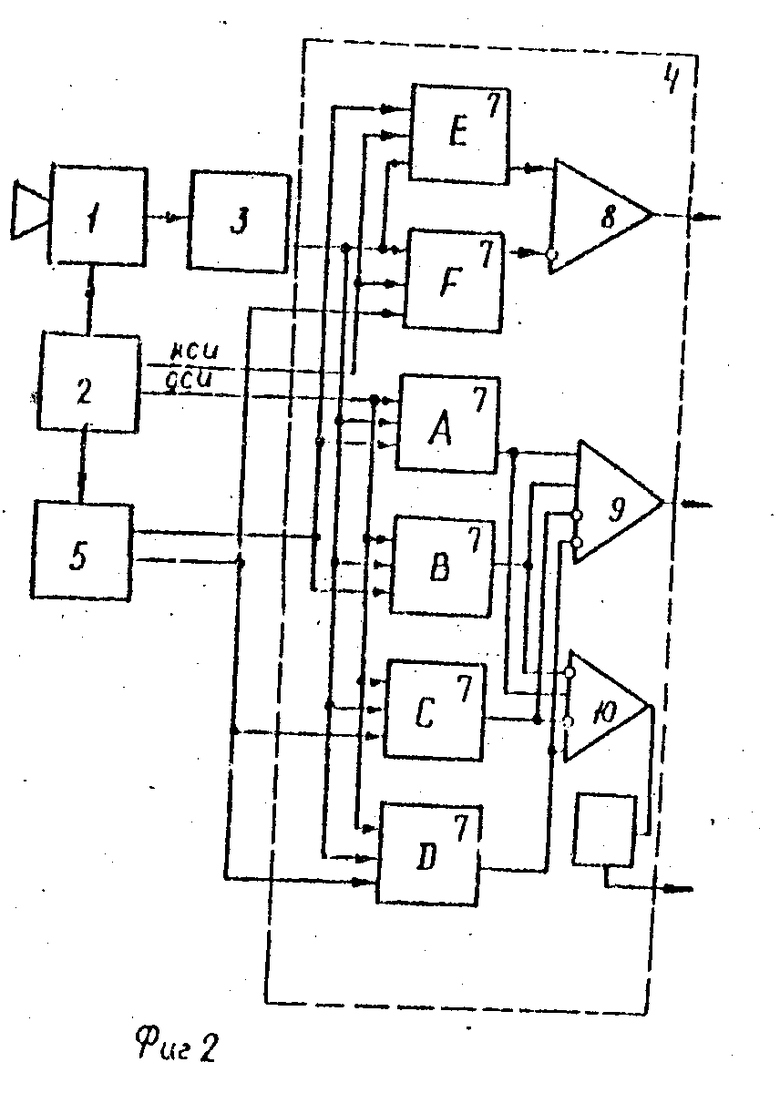
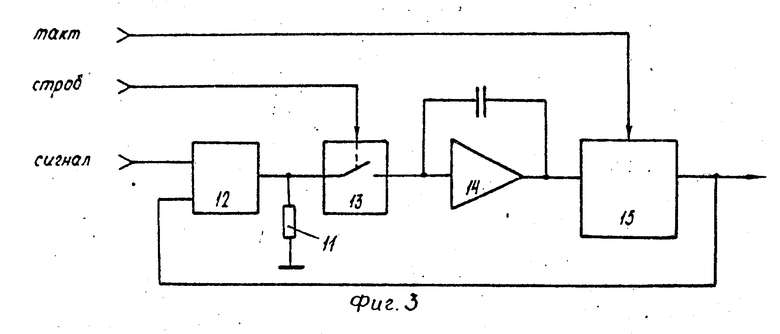
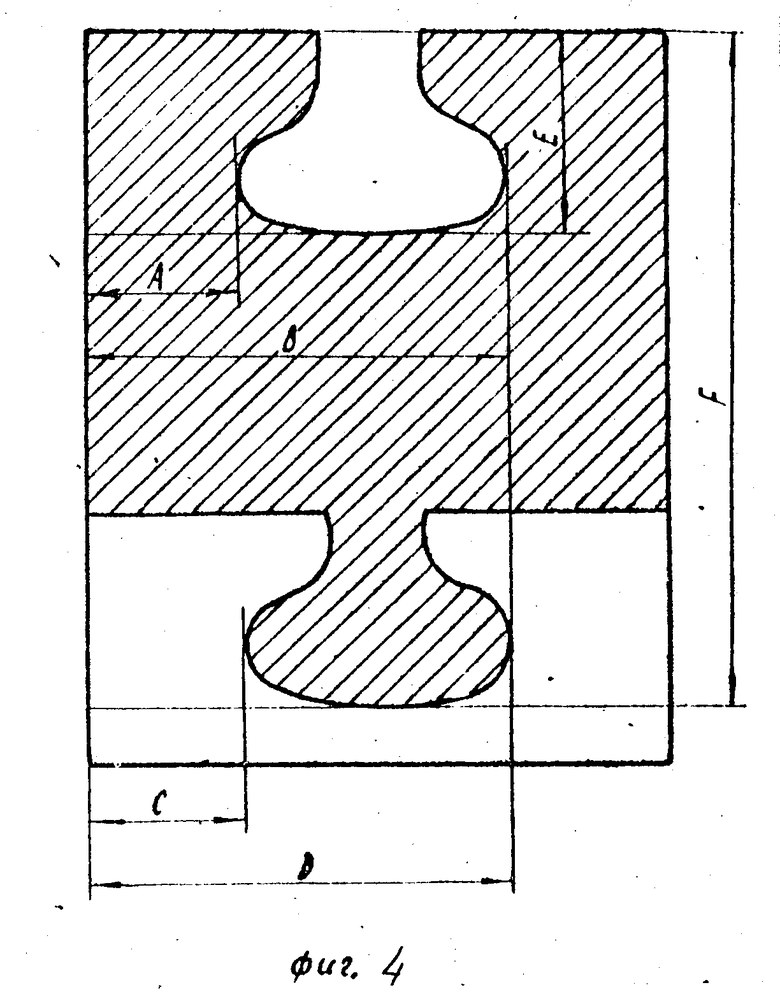
На фиг. 1 и 2 показана функциональная схема предлагаемого устройства, в соответствии с пп. 1 и 2 формулы изобретения; на фиг. 3 функциональная схема узла определения края; на фиг. 4 пример расположения контролируемых изображений в поле зрения устройства (буквами на фиг. 4 обозначены контролируемые размеры изображения).
Устройство содержит передающую телевизионную камеру 1 с синхрогенератором 2, выход видеосигнала которой через компаратор 3 подключен к сигнальному входу блока 4 определения разности координат, а выход синхросигнала к входу генератора 5 стробов, выходы которого подключены к соответствующим входам блока определения разности координат, выходы которого подключены к выходам блока 6 индикации и управления. Блок 4 определения разности координат содержит по числу контролируемых координат узлы 7 определения края, аналоговые сумматоры 8, 9. Выход компаратора 3 подключен к сигнальным входам всех узлов 7 определения края, выходы генератора 5 стробов подключены соответственно к стробирующим входам узлов 7 определения края, выходы строчных и кадровых синхроимпульсов синхрогенератора 2 подключены соответственно к тактирующим входам узлов 7 определения края, выходы узлов 7 определения края одноименных координат подключены к противоположным входам аналоговых сумматоров 8, 9, выходы которых подключены к входу блока 6 индикации и управления. Устройство содержит дополнительные аналоговые сумматоры 10. Один узел 7 определения края содержит элемент И 12, управляемый ключ 13, интегратор 14, генератор 15 управляемой задержки и разрядный элемент 16. Один вход элемента И 12 является сигнальным входом узла 7 определения края. Выход элемента И 12 подключен к сигнальному входу управляемого ключа 13 и разрядному элементу 16. Управляющий вход управляемого ключа 13 является стробирующим входом узла 7 определения края, выход управляемого ключа 13 через интегратор 14 подключен к сигнальному входу генератора 15 управляемой задержки, тактирующий вход которого является тактирующим входом узла 7 определения края, выход генератора 15 управляемой задержки подключен к другому входу элемента И 12 и является выходом узла 7 определения края.
В устройство введены последовательно включенные дополнительный аналоговый сумматор 10 и пороговый элемент 17, выходы блоков 7 определения края объектов подключены соответственно к неинвертирующим и инвертирующим входам дополнительного аналогового сумматора 10, выход порогового элемента 17 подключен к соответствующему входу блока 6 индикации и управления.
В устройство введены второй дополнительный аналоговый сумматор и экстремальный регулятор, разноименные входы второго дополнительного аналогового сумматора подключены к выходам узлов определения противоположного края регулируемого параметра, вход экстремального регулятора подключен к выходу второго дополнительного сумматора. А выход порогового элемента 17 подключен к блокирующему входу экстремального регулятора, выход которого подключен к блокирующему входу соответствующего блока 7 индикации и управления.
Устройство работает следующим образом, телевизионная камера 1 под управлением синхрогенератора 2 формирующего кадровые и строчные синхроимпульсы (КСИ и ССИ) для блока 4 определение разности координат и синхронизирующего генератора 5 стробов, фиксирует изображение неуправляемого (А, В, Е) объекта и управляемого (С, D, F) объекта. Телевизионный сигнал квантуется на два уровня компаратором 3. Блок 4 определения разности координат от селекторов изображения управляемого (С, D, F) и неуправляемого (А, В, Е) объектов согласно стробу с выхода генератора 5 подает на блок 6 индикации и управления разность высот объектов (E-F), вычисленных сумматором 8, и их боковое смещение (А/2+D/2-C/2-B/2). Этой информации достаточно, чтобы определить требуемое смещение по двум координатам для совмещения неуправляемого и управляемого объектов. Для конкретности задачи, не нарушая ее общности, рассмотрим случай совмещения ловителя (А В Е) и ключа (CDF) совмещаемых объектов. Узлы 7 определения края однотипны и предоставляют собой стробируемый элементом "И" 12 и управляемым ключом 13 интегратор 14, который управляет генератором 15 управляемой задержки. При этом при наличии сигнала и совпадении импульса с генератора 15 задержки интегратор 15 интенсивно заряжается, при этом импульс с генератора 15 сдвигает свой фронт до тех пор, пока он не будет совпадать с краем сигнала. В этом случае на выходе элемента И 12 заряжающих сигналов не будет и интегратор 14 будет медленно разряжаться через разрядный элемент 16, надвигая импульс с генератора 15 на край сигнала. Тем самым осуществляется слежение срезом импульса генератора 15 за краем изображения. Причем при тактировании строчным и синхроимпульсами (ССИ) будут отслеживаться вертикальные границы. Ближняя или дальняя граница будет отслеживаться в зависимости от того, будет увеличиваться длительность импульса с генератора 15 при росте сигнала с выхода интегратора 14 или уменьшается. При кадровом тактировании будут отслеживаться горизонтальные границы. Стробирующий импульс обрывает вход интегратора 14 ключом 13 во время анализа другого (не отслеживаемого) объекта. При этом напряжение на выходе интегратора 14 неизменно.
При совмещении ловителя (АВЕ) и ключа (CDE) возможно такое положение, что зев ключа D С меньше, чем ширина ловителя (В-А). Этот факт фиксирует пороговый элемент 17, подключенный к аналоговому сумматору 10. В этом случае можно ширину зева (определяемую как С-D, снимаемую с сумматора 11) регулировать экстремальным регулятором (поворачивая зев вокруг вертикальной оси или раздвигая губки) до тех пор, пока соотношение размеров не нормализуется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
| Оптикоэлектронный координатор для автоматического вождения мобильных агрегатов | 1986 |
|
SU1378086A1 |
| Телевизионный цветосинтезатор | 1985 |
|
SU1284006A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Устройство для измерения координат объекта | 1982 |
|
SU1059703A1 |
| Устройство для воспроизведения изображения | 1984 |
|
SU1218500A1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО | 1969 |
|
SU245869A1 |
| Устройство для формированияВЕКТОРА HA ТЕлЕВизиОННОМ эКРАНЕ | 1978 |
|
SU798965A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
Изобретение относится к телевизионной автоматике и может быть применено для установки ТВЭЛ на пластины тепловыделяющей сборки. Цель изобретения - повышение информативности путем обеспечения возможности определения допустимых соотнотшений размеров объектов. Для этого в устройстве, содержащем передающую телевизионную камеру 1 с синхрогенератором 2, компаратор 3, блок 4 определения разности координат, генератор 5 стробов и блок индикации и управления, узлы 7 определения края, число которых равно числу контролируемых координат, с помощью аналоговых сумматоров 8,9 определяют разность координат. Разность координат используется при определении требуемого смещения по двум координатам для совмещения неуправляемого и управляемого объектов. 1 з. п. ф-лы, 4 ил.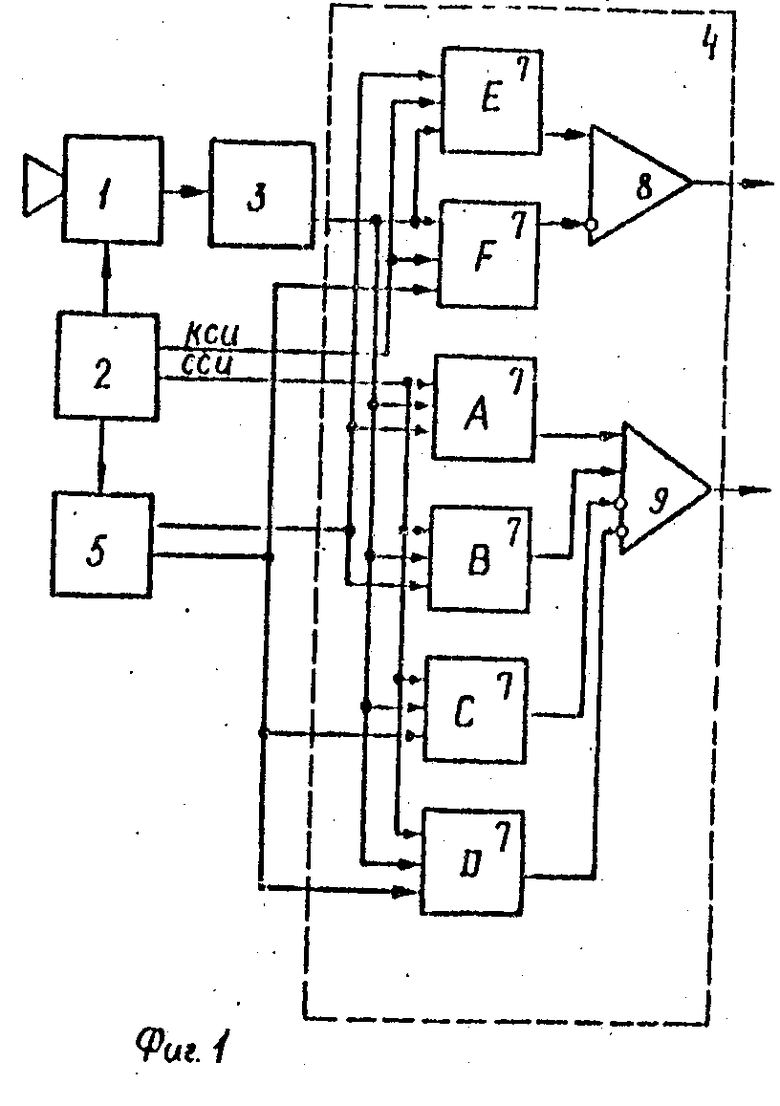
| Устройство для слежения за стыкамиСВАРиЕВАЕМыХ издЕлий | 1976 |
|
SU798736A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
