л
1
л
А
л
Ш1
СО О
о
СЛ ON
Изобретение относится к сельскохозяйственному машиностроению, а именно к приборам и устройствам для контроля и управления процессом рассева материала ма- шинами с центробежными рабочими органами, а также может быть использовано и в других отраслях народного хозяйства для управления процессами распределения веществ бросковыми аппаратами.
Целью изобретения является выполнение операций контроля за ходом процесса рассева и упрощение конструкции устройства.
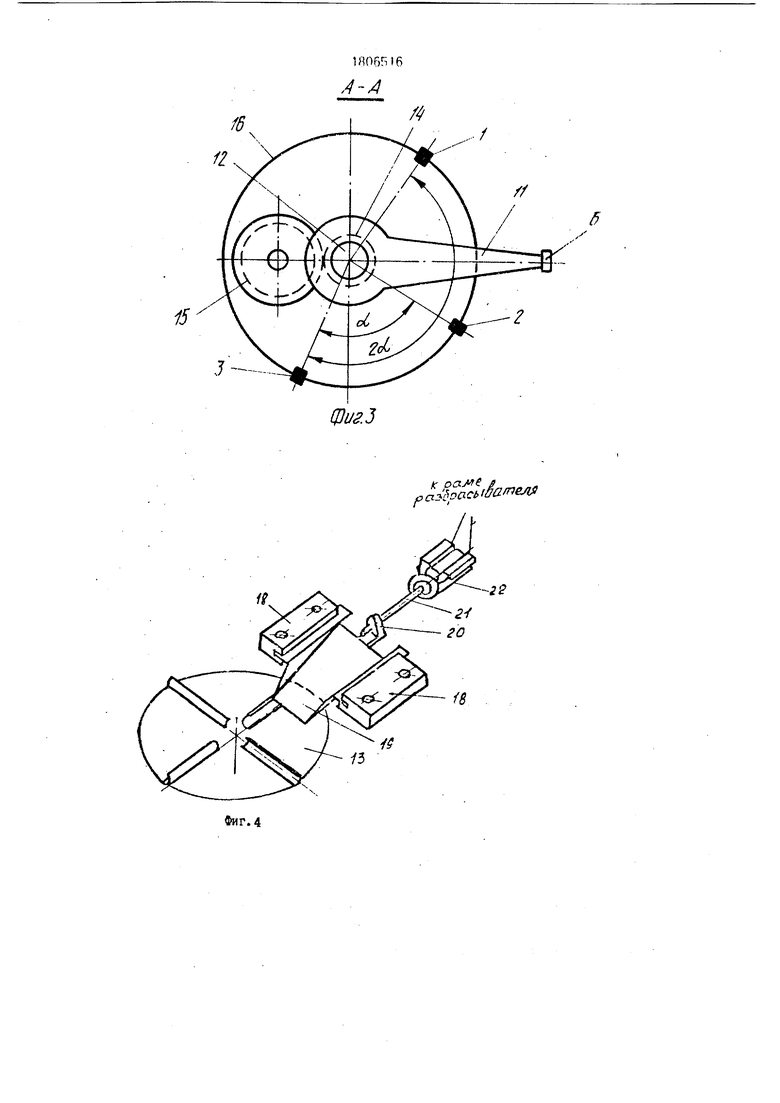
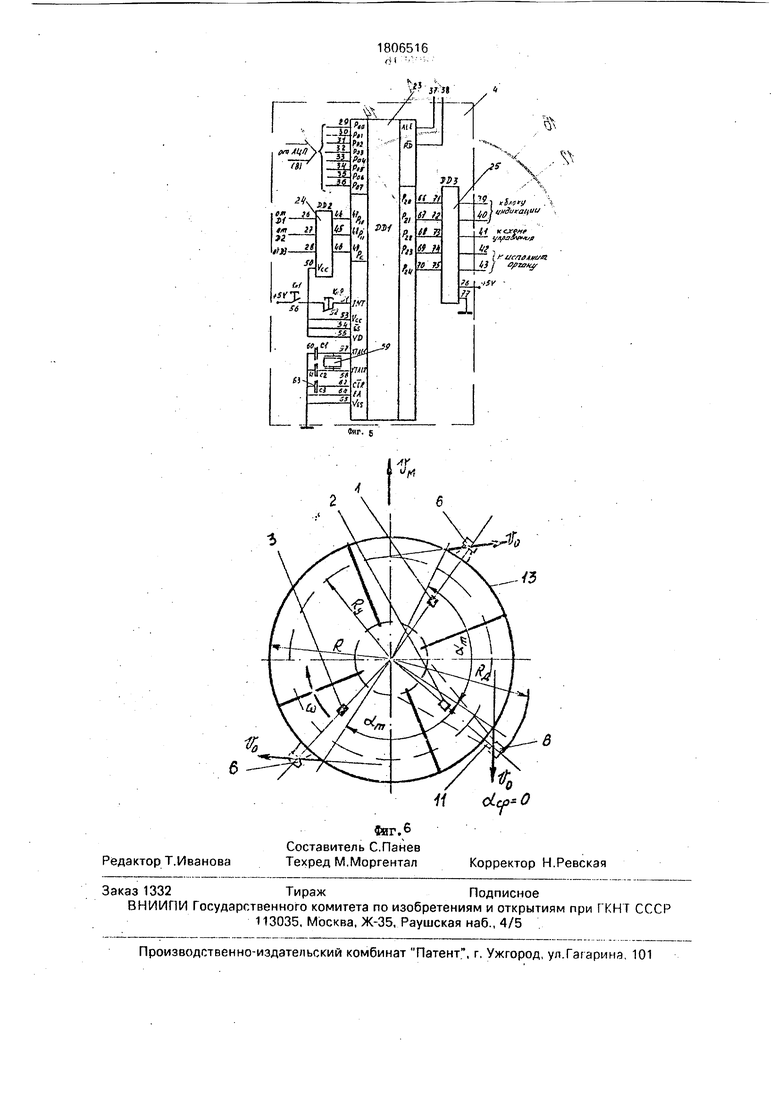
На фиг.1 представлена функциональная схема устройства; на фиг.2 изображена схема взаимного расположения диска и привода штанги измерительного преобразователя; на фиг.З - разрез А-А на фиг.2; на фиг.4 изображена схема исполнительного механизма : на фиг.5 - блок управления; на фиг.6 приведена схема к обоснованию выбора места расположения датчиков у одно- дискового разбрасывателя.
Устройство для стабилизации процесса рассева удобрений центробежным аппаратом содержит датчик 1 (см.фиг.1) начала сектор рассева, датчик 2 заданного положения сектора рассева, датчик 3 конца сектора рассева, которые подключены соответственно к первому, второму и третьему входам блока А управления. Четвертый вход блока 4 управления связан с выходом аналого- цифрового преобразователя 5, к первому входу которого подключен измерительный преобразователь 6 плотности потока частиц. К первому выходу блока 4 управления через схему 7 управления подключен электродвигатель 8 постоянного тока. Второй выход блока 4 управления связан с исполнительным органом 9. Третий выход блока 4 управления соединен с блоком 10 индикации, а к четвертому выходу блока 4 управления подключен второй вход анало- го-цифрового преобразователя 5.
Аналого-цифровой преобразователь 5 выполнен на основе микросхемы К572ПВЗ, Блок индикации 10 выполнен на светодио- дахАОЛПОА.
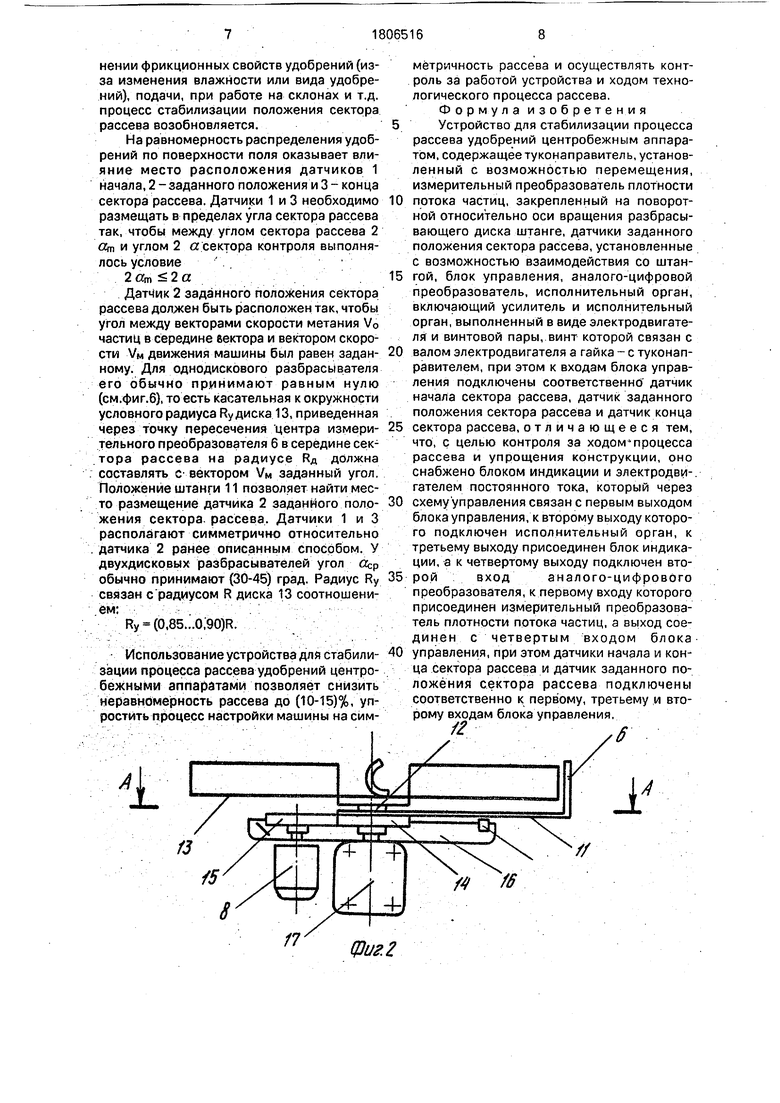
Измерительный преобразователь 6 плотности потока частиц выполнен в виде пьезодатчика, помещенного в герметичный корпус. Измерительный преобразователь 6 закреплен на штанге 11 (см. 2,3) консольно. Штанга 11 установлена с возможностью поворота относительно оси 12 вращения центробежного диска 13. К штанге 11 прикреплено зубатое колесо 14 входящее в зацепление с шестерней 15, жестко установленной на вапу электродвигателя 8 постоянного тока. Электродвигатель 8 прикреплен к пластине 16 чашеобразной формы, которая закреплена на корпусе редуктора 17. Редуктор 17 закреплен на раме разбрасывателя
(на фиг. не показана) и осуществляет привод центробежного диска 13.
На пластине 16 установлены с возможностью взаимодействия со штангой 11 датчики 1, 2 и 3. Датчик 1 установлен в начале
сектора рассева, а датчик 3 - в конце. Угол между датчиками 1 и 3, измеренный в направлении вращения диска 13, равен 2 а (см.фиг.З). На середине угла 2 а закреплен датчик 2 заданного положения сектора рассева, выполненный в виде микропереключателя.
На раме разбрасывателя закреплены пластины 18 (см.фиг.4) в пазах которых установлен с возможностью перемещения туконаправитель 19. На нерабочей стороне туконаправителя 19 закреплена гайка 20. взаимодействующая с винтом 21. Винт 21 соединен с валом электродвигателя 22, закрепленного на раме разбрасывателя.
Блок 4 управления включает (см.фиг.5) интегральную микросхему 23 типа К1816ВЕ48, микросхему ввода 24 типа К580ВА86. Выводы 26,27,28 микросхемы 24 подключены соответственно к датчикам 1,2,
3 начала, заданного положения и конца сек- тора рассева.
Выводы (Р10...Р17) 29, 30, 31, 32, 33, 34, 35,36 микросхемы 23 подключены к выходу аналого-цифрового преобразователя 5, а
выводы (ALE, RD) 37, 38 связаны со вторым входом аналого-цифрового преобразователя 5.
Выводы 39,40 микросхеммы 25 подключены к входу блока 10 индикации, вывод 41
микросхемы 25 связан с входом схемы 7 управления, а выводы 42, 43 соединены с входом исполнительного органа 9.
Выводы 44, 45 46 микросхемы 24 подключены соответственно к выводам (Р10,
Р11, Р12)47, 48, 49 микросхемы 23.
Выводы 50, (INT)51 через кнопку Сброс 52. (Vcc) 53, (SS) 54, (VD) 55 микросхемы 24 подключены через кнопку Пуск 56 к источнику питания + 5В.
К выводам (XTAL.1) 57, (XTAL2) 58 подключен кварцевый резонатор 59, а они в свою очередь через конденсаторы (Ci) 60, (Са) 61, а так же вывод (CLR) 62 через конденсатор (Сз) 63 и выводы (ЕА) 64. (Vss) 65
подключены земле.
Выводы микросхемы 23 (Рзо, PZI, Р22. Pas, P24) 66, 67, 68, 69, 70 присоединены соответственно к выводам 71, 72, 73, 74. 75 микросхемы 25, а вывод 76 микросхемы 25
подключен к источнику питания +5В, вывод 77 связан с землей,
Устройство работает следующим образом.
После включения рабочих органов разбрасывателя оператор (механизатор) при необходимости выполнения операций настройки или контроля процесса рассева нажатием кнопки Пуск включает устройство в работу.
При включении устройства в работу блок 4 управления тестирует блок 10 индикации, то есть включает светодиоды блока 10 индикации на некоторое время, а затем их отключает. Это позволяет оператору убедится в исправности блока 10 индикации. После этого блок 4 управления вырабатывает сигнал, который через схему 7 управления включает электродвигатель 8 постоянного тока. Электродвигатель 8 через зубчатую передачу 14 - 15 перемещает штангу 11 с измерительным преобразователем 6 в секторе рассева удобрений.
Если через время ti штанга 11 с измерительным преобразователем 6 не переместится в начало сектора рассева, то есть на блок 4 управления не поступит сигнал от датчика 1 начала сектора рассева, то блок 4 управления вырабатывает сигнал на схему 7 управления для отключения электродвигателя. 8, а также сигнал на включение одного из светодиодов блока 10 индикации, сигнализирующего о неисправности устройства. При достижении штангой 11 начала сектора рассева сигнал об этом от датчика 1 поступает в блок 4 управления, который через промежуток времени т.2 вырабатывает сигнал на включение аналого-цифрового преобразователя 5. Этот сигнал служит командой на преобразование аналогового сигнала от измерительного преобразователя. 6 в цифровую форму. Сигнал от измерительного преобразователя 6, находящегося в данной точке сектора рассева, соответствующий интенсивности потока частиц сходящих с лопаток центробежного диска 13 поступает на первый вход аналого-цифрового преобразователя 5, а затем в цифровой форме поступает на четвертый вход блока 4 управления. Этот сигнал в блоке 4 управления накапливается в ячейке памяти Si, после чего на второй вход аналого-цифрового преобразователя 5 подается сигнал на сброс информации от измерительного преобразователя 6.
Через время t2, после того как штанге 11 с измерительным преобразователем 6 переместится в другую.точку сектора рассева цикл измерения повторится.
Когда штанга 11 с измерительным преобразователем 6 достигнет датчика 2 заданного положения сектора рассева на второй вход блока 4 управления будет подан сигнал от датчика 2 на начало накопления суммы в ячейке памяти $2 блока 4 управления. Накопление информации в ячейке памяти $2 будет происходить до тех пор пока штанга 11с измерительным преобразователем 6 не
0 достигнет конца сектора рассева и на третий вход блока 4 управления не будет подан сигнал от датчика 3 конца сектора рассева. После этого в блоке 4 управления анализируется содержимое ячеек памяти Si и S2.
5 Если Si 0 и S2 0, то блок 4 управления формирует сигнал на схему 7 управления для отключения электродвигателя 8 привода штанги 11 индикации для включения соответствующего светодиода. Этот сигнал
0 информирует оператора (механизатора) о нарушении технологического процесса рассева удобрений (причинами нарушения могут быть: закончились удобрения в бункере; нет подачи материала на диск; не вращается
5 диск 13 или другая неисправность). Этим достигается поставленная цель - контроль технологического процесса рассева удобрений.
Если содержимое ячеек памяти Si и $2
0 не равны нулю, то в блоке 4 управления вычисляется разность этих сумм S3 Si-S2 и полученный результат S3 сравнивается с заранее определенной погрешностью измерений Е и -Е. В зависимости от полярности
5 суммы Sj на втором выходе блока 4 управления формируется сигнал, подаваемый на исполнительный орган 9, который производит включение вращения электродвигателя 22. Если электродвигатель 22 включа0 ется на вращение винта 21 по ходу часовой стрелки (правая резьба) или против хода часовой стрелки (левая резьба). При условии блоке 4 управления формирует сигнал на включение вращения винта 21 против
5 хода (правая резьба) или по ходу (левая резьба) часовой стрелки, перемещая туконапра- витель 19 по пазам пластин 18 в новое положение на один шаг винта 21.
Когда штанга 11 с измерительным пре0 образователем 6 достигнет начала сектора рассева, на первом входе блока 4 управления появится сигнал от датчика 1 начала сектора рассева и процесс работы устройства повторится. Это будет происходить до
5 тех пор, пока не выполнится условие -. , При достижении этого условия сектор рассева устанавливается в заданном положении.
При отклоним сектора рассева от требуемого положения, что возможно при изменении фрикционных свойств удобрений (из- за изменения влажности или вида удобрений), подачи, при работе на склонах и т.д. процесс стабилизации положения сектора рассева возобновляется.
На равномерность распределения удобрений по поверхности поля оказывает влияние место расположения датчиков 1 начала, 2 -заданного положения и 3 - конца сектора рассева. Датчики 1 и 3 необходимо размещать в пределах угла сектора рассева так, чтобы между углом сектора рассева 2 От и углом 1 «сектора контроля выполнялось условие ..:
2ат 2а
Датчик 2 заданного положения сектора рассева должен быть расположен так, чтобы угол между векторами скорости метания V0 частиц в середине вектора и вектором скорости Л/м движения машины был равен заданному. Для однодискового разбрасывателя его обычно принимают равным нулю (см.фиг.6), то есть касательная к окружности условного радиуса Ry диска 13, приведенная через точку пересечения центра измерительного преобразователя 6 в середине сектора рассева на радиусе Вд должна .составлять с- вектором VM заданный угол. Положение штанги 11 позволяет найти место размещение датчика 2 заданного положения сектора, рассева. Датчики 1 и 3 располагают симметрично относительно .датчика 2 ранее описанным способом. У двухдисковых разбрасывателей угол Оср обычно принимают (30-45) град. Радиус Ry связан с радиусом R диска 13 соотношени- ем: -. . : -... - - .. :
Ry (0,85...0,90)R.
мётричность рассева и осуществлять контроль за работой устройства и ходом технологического процесса рассева.
Ф о р м у л а и з о б рете н.и я
5Устройство для стабилизации процесса рассева удобрений центробежным аппаратом, содержащее туконаправитель, установленный с возможностью перемещения, измерительный преобразователь плотности
10 потока частиц, закрепленный на поворотной относительно оси вращения разбрасывающего диска штанге, датчики заданного положения сектора рассева, установленные с возможностью взаимодействия со штан15 гой, блок управления, аналого-цифровой преобразователь, исполнительный орган, включающий усилитель и исполнительный орган, выполненный в виде электродвигате- ляг и винтовой пары, винт которой связан с
20 валом электродвигателя а гайка - с туконап- равителем, при этом к входам блока управления подключены соответственно датчик начала сектора рассева, датчик заданного положения сектора рассева и датчик конца
25 сектора рассева, отличающееся тем, что, с целью контроля за ходом процесса рассева и упрощения конструкции, оно снабжено блоком индикации и электродвигателем постоянного тока, который через
30 схему управления связан с первым выходом блока управления, к второму выходу которого подключен исполнительный орган, к третьему выходу присоединен блок индикации, а к четвертому выходу подключен вто35 ройвход аналого-цифрового преобразователя, к первому входу которого присоединен измерительный преобразователь плотности потока частиц, а выход соединен с четвертым входом блока Использование устройства для стабили- 40 управления, при этом датчики начала и кон-„ и«5 oi/тлпо noorooQ М naTUMIf 1ЯПЯМНЛГП ППзации процесса рассева удобрений центробежными аппаратами позволяет снизить неравномерность рассева до (10-15)%, упростить процесс настройки машины на симца сектора рассева и датчик заданного положения сектора рассева подключены соответственно к первому, третьему и второму входам блока управления,
//
мётричность рассева и осуществлять контроль за работой устройства и ходом технологического процесса рассева.
Ф о р м у л а и з о б рете н.и я
Устройство для стабилизации процесса рассева удобрений центробежным аппаратом, содержащее туконаправитель, установленный с возможностью перемещения, измерительный преобразователь плотности
потока частиц, закрепленный на поворотной относительно оси вращения разбрасывающего диска штанге, датчики заданного положения сектора рассева, установленные с возможностью взаимодействия со штангой, блок управления, аналого-цифровой преобразователь, исполнительный орган, включающий усилитель и исполнительный орган, выполненный в виде электродвигате- ляг и винтовой пары, винт которой связан с
валом электродвигателя а гайка - с туконап- равителем, при этом к входам блока управления подключены соответственно датчик начала сектора рассева, датчик заданного положения сектора рассева и датчик конца
сектора рассева, отличающееся тем, что, с целью контроля за ходом процесса рассева и упрощения конструкции, оно снабжено блоком индикации и электродви. гателем постоянного тока, который через
0 схему управления связан с первым выходом блока управления, к второму выходу которого подключен исполнительный орган, к третьему выходу присоединен блок индикации, а к четвертому выходу подключен вто5 ройвход аналого-цифрового преобразователя, к первому входу которого присоединен измерительный преобразователь плотности потока частиц, а выход соединен с четвертым входом блока управления, при этом датчики начала и кони«5 oi/тлпо noorooQ М naTUMIf 1ЯПЯМНЛГП ППца сектора рассева и датчик заданного положения сектора рассева подключены соответственно к первому, третьему и второму входам блока управления,
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1985 |
|
SU1291049A1 |
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1986 |
|
SU1423028A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА РАБОТЫ МАШИН С ДИСКОВЫМИ РАБОЧИМИ ОРГАНАМИ ПРИ ВНЕСЕНИИ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019948C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫСЕВА МИНЕРАЛЬНЫХ УДОБРЕНИЙ ШНЕКОВЫМ ВЫСЕВАЮЩИМ АППАРАТОМ | 1998 |
|
RU2137338C1 |
| Устройство для внесения удобрений | 1989 |
|
SU1628896A1 |
| Устройство для стабилизации процесса рассева удобрений центробежными аппаратами | 1988 |
|
SU1535420A1 |
| Устройство для контроля неравномерности рассева удобрений центробежным разбрасывателем | 1984 |
|
SU1209065A1 |
| Устройство для стабилизации положения сектора рассева | 1988 |
|
SU1604199A1 |
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2012 |
|
RU2533909C2 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ ВЫСЕВАЮЩЕГО АППАРАТА ПНЕВМАТИЧЕСКОЙ СЕЯЛКИ | 2023 |
|
RU2824462C1 |
Сущность изобретения: устройство содержит датчики 1 и 3 начала и конца сектора рассева, датчик 2 заданного положения сектора рассева, измерительный преобразователь 6 плотности потока частиц, блок 4 управления, аналого-цифровой преобразователь 5, исполнительный орган 9 с электродвигателем 8 постоянного тока, схему 7 управления электродвигателем постоянного тока и блок 10 индикации. 6 ил;
| Устройство для стабилизации процесса рассева удобрений центробежными аппаратами | 1988 |
|
SU1535420A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
