и 2
Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для внесения минеральных удобрений и их смесей, оборудованных центробежно-дисковыми рабочими органами.
Целью изобретечия является повыше-1 ние равномерности рассева удобрений путем повышения стабилизации подачи на диск.
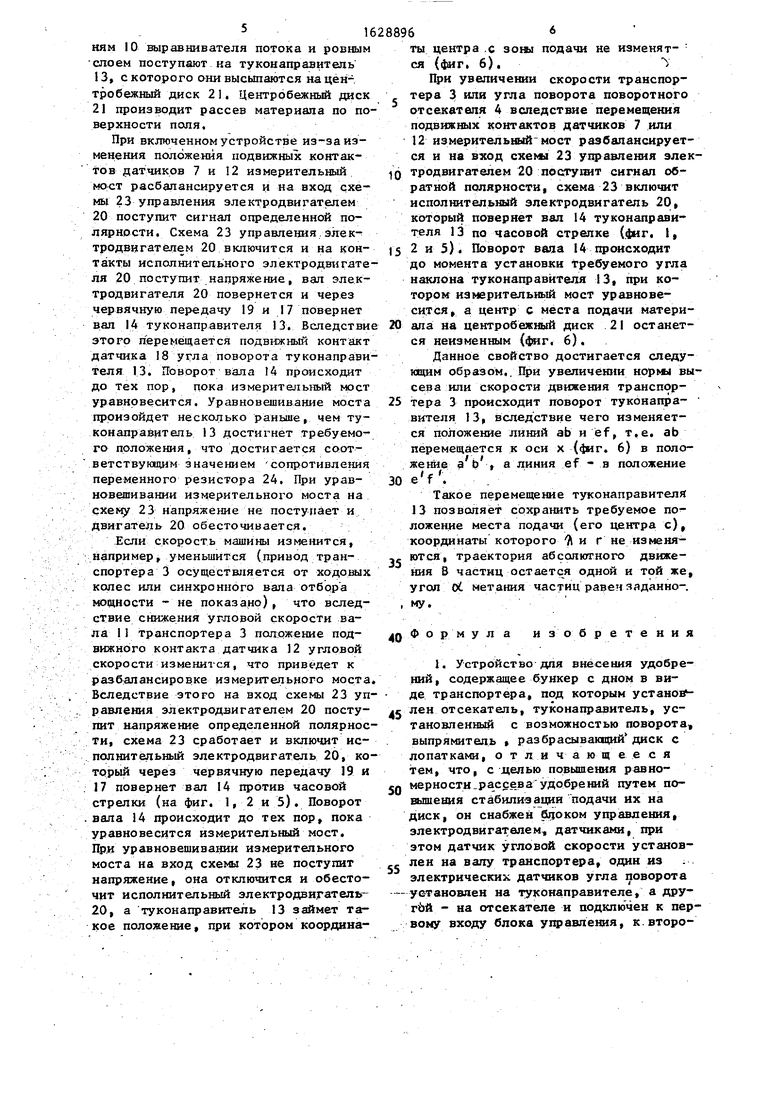
На фиг. 1 изображено устройство для стабилизации места подачи удобрений на диск; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2 на фиг. 4 - функциональная схема устройства; на фиг. 5 - принципиальная схема устройства; на фиг. 6 - распределение и траектория движения частиц по центробежному диску.
Устройство для стабилизации места подачи удобрений на диск содержит раму 1, на которой установлен бункер 2 с транспортером 3 (фиг, 1 2). На выходе из бункера 2 над транспортером 3 установлен поворотный отсекатель 4, жестко установленный на валу 5. Поворот отсекателя 4 осуществляется с помощью штурвала 6. Положение поворотного отсекателя 4 над транспортером 3 фиксируется фиксатором (не показан), удерживающим штурвал 6. На валу 5 поворотно.го отсекателя 4 установлен датчик 7 угла поворота поворотного отсекателя 4. На раме 1 по боковым граням транспортера 3 установлены ограничительные пластины 8, в которых жестко закреплен вал 9, где закреплены подпружиненные стержни 10, примыкающие одним концом к транспортеру 3. На валу 11 (фиг. 5} транспортера 3 установлен датчик 12 угловой скорости вала I1 (фиг. 1 и 5). Под транспортером 3 (фиг. 1 и 2) на ограничительных пластинах 8 с возможностью поворота установлен туконап- равитель 13. Вал 14 и туконаправитель 13 соединены посредством кронштейнов 15 жестко. С одной стороны вала 14 установлена опора 16 скольжения, жестко связанная с ограничительной пластиной 8, а с другой стороны вал 4 связан с колесом 17 червячной передачи. На валу 14 установлен датчик 18 угла поворота туконаправителя 13. Вал 19 (фиг. 5) червяка соединен с валом исполнительного электродвигателя 20. Под туконаправителем 1 3 на раме I ус20
25
-10
15
30
35
40
45
50
55
тановлен разбрасыьающий диск 21 (фиг. 1 и 2).
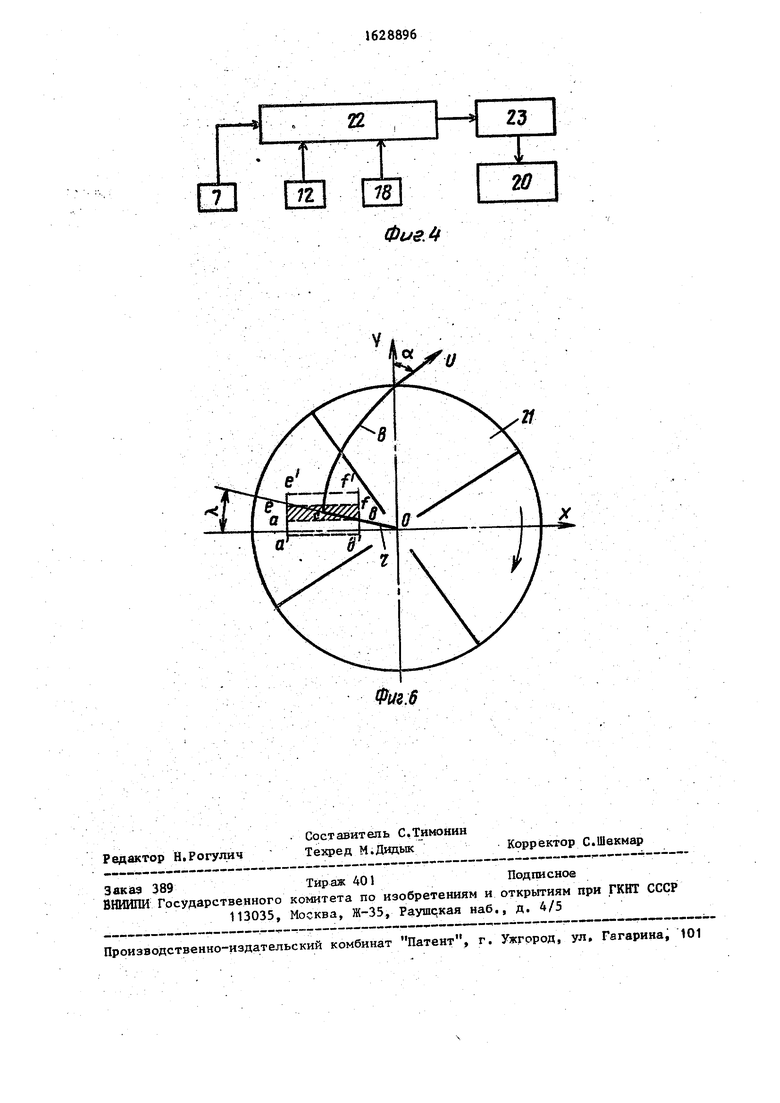
Выход датчика 7 угла поворота поворотного отсекателя 4 подключен к первому входу блока 22 управления, к второму входу которого подключен выход датчика 12 угловой скорости вала 11 (фиг. 4 и 5) транспортера 3. К третьему входу блока 22 управления подключен выход датчика 18 угла поворота туконаправителя 13. .Выход блока 22 управления через схему 23 управления соединен с исполнительным электродвигателем 20,
Блок 22 управления (фиг. 5) выполнен по схеме уравновешенного моста, в плечи которого включены: в одно - датчик 7 угла поворота поворотного отсекателя 4 и датчик 12 угловой скорости вала 1 транспортера 3; во второе - подстроечный резистор 24; в третье - датчик 18 угла поворота туконаправителя 13; в четвертое - постоянный резистор 25. Питание блока 22 управления осуществляется стабилизированным напряжением Uc блока 26 питания электросистемы агрегата,
Датчики 7 и 18 угла поворота выполнены в виде переменных резисторов. Датчик 12 угловой скорости вала 11 транспортера 3 - механического центробежного типа, ползун которого связан с подвижным контактом переменного транзистора.
Схема 23 управления электродвигателем 20 выполнена на основе схемы нуль-индикатора с тремя устойчивыми состояниями.
Перед.началом работы оператор, пользуясь таблицей норм высева, путем поворота штурвала 6 устанавливает требуемый угол поворота вала 5 поворотного отсекат.еля 4 и фиксирует штурвал 6. Совместно с валом 5 поворачивается подвижный контакт датчика 7 угла поворота поворотного отсекателя 4.
При движении разбрасывателя по полю включаются рабочие органы: привод 21 центробежного диска и вала 11 транспортера 3. Совместно с валом 11 получает привод и вал датчика 12 угловой скорости вала 11 транспортера 3. Вследствие вращения вала 11 перемещается подвижный контакт резистора 12.
Удобрения, ограниченные от высыпания ограничительными пластинами 8, транспортером 3 перемещаются к стержним 10 выравнивателя потока и ровным слоем поступают на туконаправитель 13, с которого они высыпаются на центробежный диск 21. Центробежный диск 21 производит рассев материала по поверхности поля.
При включенном устройстве из-за изменения положения подвижных контактов датчиков 7 и 12 измерительный мост расбалансируется и на вход схемы 23 управления электродвигателем 20 поступит сигнал определенной полярности. Схема 23 управления электродвигателем 20 включится и на контакты исполнительного электродвигателя 20 поступит напряжение, вал электродвигателя 20 повернется и через червячную передачу 19 и 17 повернет вал 14 туконаправителя 13. Вследствие этого перемещается подвижный контакт датчика 18 угла поворота туконаправителя 13. Поворот вала 14 происходит до тех пор, пока измерительный мост уравновесится. Уравновешивание моста произойдет несколько раньше, чем туконаправитель 13 достигнет требуемого положения, что достигается соответствующим значением сопротивления переменного резистора 24, При уравновешивании измерительного моста на схему 23 напряжение не поступает и двигатель 20 обесточивается.
Если скорость машины изменится, например, уменьшится (привод транспортера 3 осуществляется от ходовых колес или синхронного вала отбора мощности - не показано), что вследствие снижения угловой скорости вала 11 транспортера 3 положение подвижного контакта датчика 12 угловой скорости изменится, что приведет к разбалансировке измерительного моста. Вследствие этого на вход схемы 23 управления электродвигателем 20 поступит напряжение определенной полярности, схема 23 сработает и включит исполнительный электродвигатель 20, который через червячную передачу 19 и 17 повернет вал 14 против часовой стрелки (на фиг. 1, 2 и 5). Поворот вала 14 происходит до тех пор, пока уравновесится измерительный мост. При уравновешивании измерительного моста на вход схемы 23 не поступит напряжение, она отключится и обесточит исполнительный электродвигателъ- 20, а туконаправитель 13 займет такое положение, при котором координа
5
0
5
изменит-
ты центра с зоны подачи не ся (фиг, 6).
При увеличении скорости транспортера 3 или угла поворота поворотного отсекателя 4 вследствие перемещения подвижных контактов датчиков 7 или
12измерительный-мост разбалансирует- ся и на вход схемы 23 управления электродвигателем 20 поступит сигнал обратной полярности, схема 23 включит исполнительный электродвигатель 20, который повернет вал 14 туконаправителя 13 по часовой стрелке (фиг. 1,
5 2 и 5). Поворот вала 14 происходит до момента установки требуемого угла наклона туконаправителя 13, при котором измерительный мост уравновесится, а центр с места подачи материала на центробежный диск 21 останется неизменным (фиг. 6}.
Данное свойство достигается следующим образом, При увеличении нормы высева или скорости движения транспортера 3 происходит поворот туконаправителя 13, вследствие чего изменяется положение линий ab и ef, т.е. ab перемещается к оси х (фиг. 6) в положение a b , а линия ef - в положение e f .
Такое перемещение туконаправителя
13позволяет сохранить требуемое положение места подачи (его центра с), координаты которого ft и г не изменяются, траектория абсолютного движения В частиц остается одной и той же, угол Oi. метания частиц равен заданно-, му.
0
5
O
5
с возможностью поворота, , разбрасывающий диск с
Формула изобретения
1. Устройство для внесения удобрений, содержащее бункер с дном в виде транспортера, под которым установ лен отсекатель, туконаправитель, установленныйвыпрямитель лопатками, отличающееся тем, что, с делью повышения равномерности .рассева удобрений путем повышения стабилизации подачи их на диск, он снабжен блоком управления, электродвигателем, датчиками, при этом датчик угловой скорости установлен на валу транспортера, один из электрических датчиков угла поворота установлен на туконаправителе, а дру- гЬй - на отсекателе и подключен к первому входу блока управления, к второму входу которого подключен датчик угловой скорости, к третьему входу блока управления подключен датчик угла поворота туконаправителя, причем выход блока управления, соединен с электродвигателем, вал которого посредством червячной передачи соединен с валом туконаправителя.
2. Устройство по п, отличающееся тем, что выравниватель потока выполнен в виде подпружиненных стержней.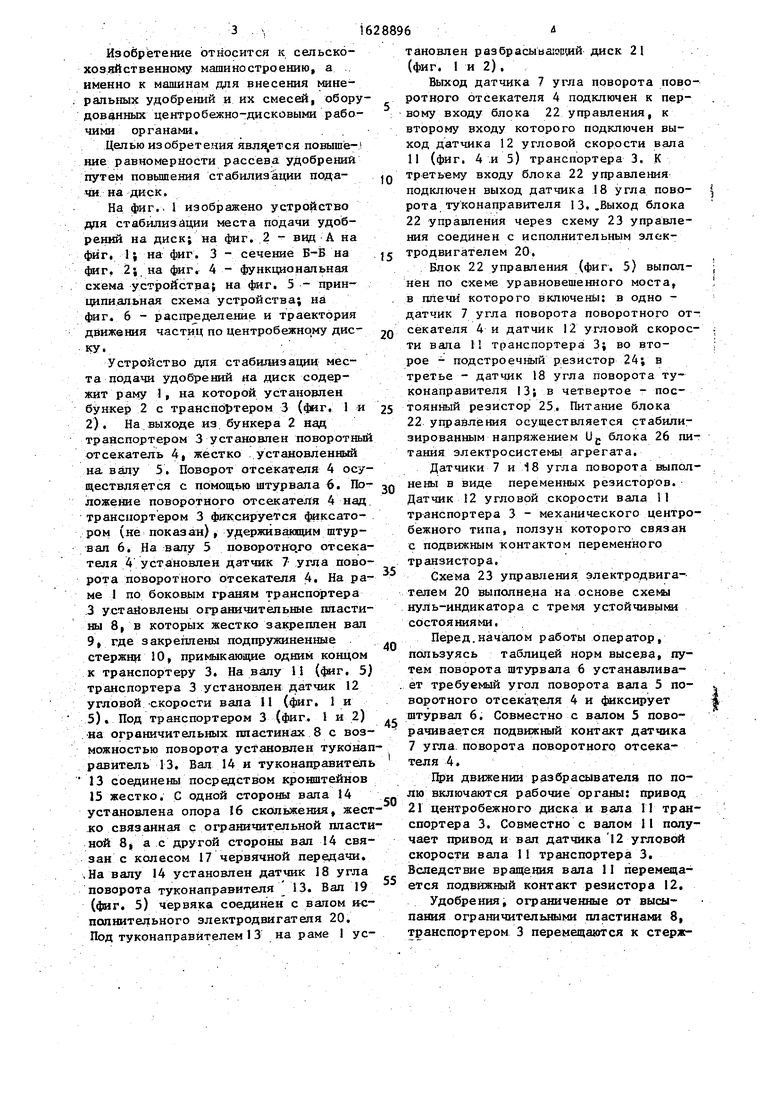
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации процесса рассева удобрений центробежным аппаратом | 1991 |
|
SU1806516A1 |
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1985 |
|
SU1291049A1 |
| Устройство контроля качества внесения удобрений центробежным разбрасывателем | 1986 |
|
SU1423028A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА РАБОТЫ МАШИН С ДИСКОВЫМИ РАБОЧИМИ ОРГАНАМИ ПРИ ВНЕСЕНИИ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019948C1 |
| УПРАВЛЕНИЕ ПРЕИМУЩЕСТВЕННО РУЛЕВОГО ТИПА | 2004 |
|
RU2278796C2 |
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1991 |
|
RU2024333C1 |
| СПОСОБ ПОВЕРХНОСТНОГО ВНЕСЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236776C2 |
| Центробежное устройство для внесения удобрений | 1987 |
|
SU1526598A1 |
| Теневой проектор тренажера транспортных средств | 1977 |
|
SU741312A1 |
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2012 |
|
RU2533909C2 |
Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является повышение равномерности рассева удобрений при изме23 20 19 17 нении дозы удобрений или скорости движения транспортера. В устройстве установлен блок 22 управления, выполненный в виде измерительного моста. Изменение дозы внесения удобрений осуществляется датчиком 7 угла поворота, установленным в одном плече с датчиком 12 угловой скорости вала 11 привода транспортера 3. Небаланс этого плеча измерительного моста устраняется через вращение электродвигателем 20 туконаправителя 13 и датчика 18 угла поворота туконаправителя 13. В результате поворота туконаправителя 13 сохраняется положение центра тяжести моста подачи материала на разбрасывающем диске, 1 э.п.ф-лы, 6 кл. о Л--22 О5 Фиг. 5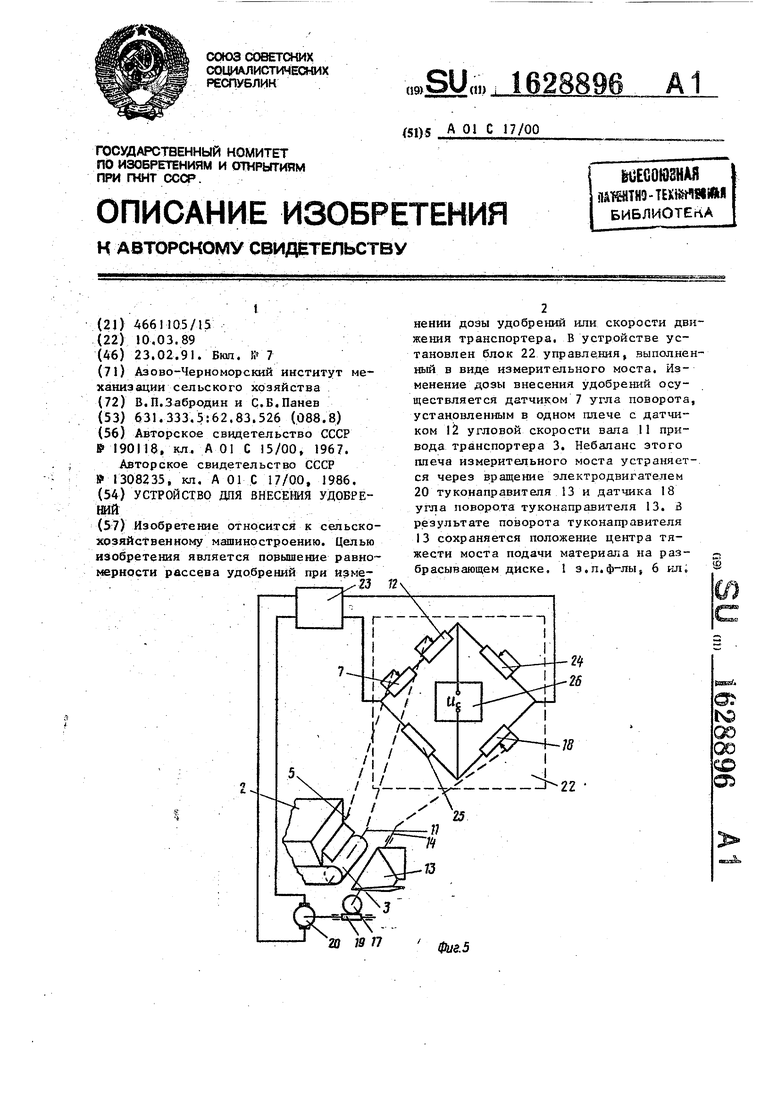
17
ю
8
Фиг.1
9
v
96P9Z91
,е/
si
sf-з
8
ФигМ
и
21
Фиг.6
| ПРИСПОСОБЛЕНИЕ К РАЗБРАСЫВАТЕЛЯМ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 0 |
|
SU190118A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для внесения удобрений | 1986 |
|
SU1308235A1 |
