Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического регулирования уровня жидкости в емкости.
Цель изобретения - повышение точности и надежности регулятора.
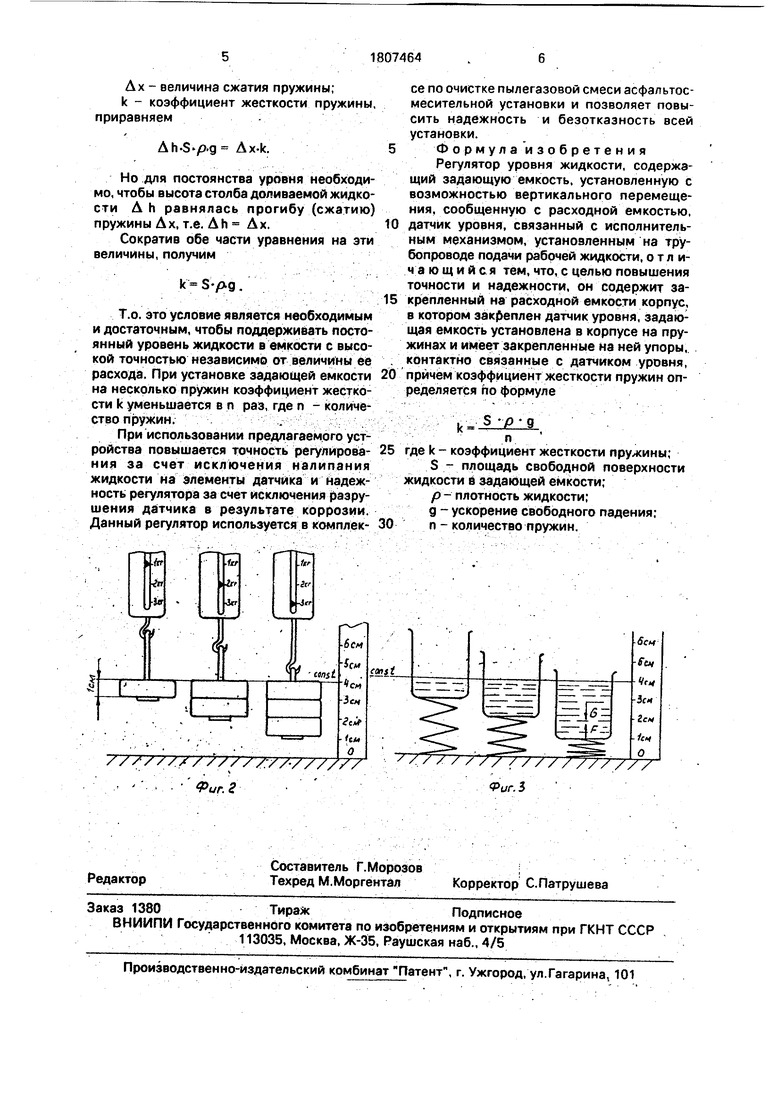
На фиг.1 изображена принципиальная схема регулятора уровня жидкости; на фиг.2 и 3 - принцип удержания постоянного уровня. , - -.
На расходной емкости 1 неподвижно закреплен корпус 2 с закрепленным на нем датчиком 3 уровня, имеющим рычаг 4.
В корпусе 2 закреплена с возможностью вертикального перемещения задающая емкость 5, установленная на пружинах 6 и винтах 7, на которой закреплены упоры 8 и 9, при этом она сообщена с расходной емкостью 1 гибким трубопроводом 11 подачи жидкости, на котором установлен исполнительный механизм в виде мембранного нормально закрытого клапана 12 с пневматическим управлением, связанный с датчиком 3 уровня. .
Датчик 3 уровня соединен с мембранным клапаном 12 через электропневматический клапан 13, преобразующий электрический сигнал датчика в пневматический. Питание электроэнергией производится через выключатель 14. Слив производится через вентиль 15.
Регулятор работает следующим обра.ЗОМ. ..; Л .; - . .. ./. . ... .. . .
При нормальном уровне жидкости в расходной емкости 1 и задающей емкости 5 рычаг 4 датчика уровня 3 переключен в нижнее положение и не касается упоров 8 и 9, его контакты разомкнуты и сигнал на выходе отсутствует. Электропневматический клапан 13, не имея сигнала, то же закрыт и пневматический сигнал на его выходе отсутствует. Мембранный клапан 12, не имея на входе пневматического сигнала, закрыт и жидкость из трубопровода 11 вемкость 1 не поступает. При понижении уровня жидкости в расходной емкости 1 понижается уро: вень жидкости в задающей емкости 5 (по принципу сообщающихся сосудов), масса жидкости в задающей емкости 5 уменьшается и она приподнимается на пружинах б до касания нижним упором 9 рычага 4 датчика 3 и при дальнейшем ее поднятии рычаг 4 переключается в верхнее положение и замыкает контакты. Электрический сигнал поступает на электропневматический клапан 13, который включается и подает сжатый воздух на мембранный клапан 12. Мембранный клапан 12 открывается и жидкость по трубопроводу 11 поступает в емкость 1. Уровень в расходной емкости 1, а следователь
но, и в задающей емкости 5 повышается, при этом она под действием увеличивающейся массы жидкости проседает на пружинах 6 и пускается до нажатия упора 8 на
рычаг 4 датчика 3 и переключает его в нижнее положение, контакты датчика 3 размыкаются, электропневматический клапан 13 обесточивается, выключает подачу сжатого воздуха на мембранный клапан 12, соединяя его с атмосферой. Мембранный клапан 12 перекрывает подачу жидкости из трубопровода 11 в емкость 1. При очередном пони- жении уровня жидкости в расходной емкости 1 цикл повторяется. В процессе повторения циклов уровень жидкости в емкости 1 колеблется на 0,3-0,5 мм, в то время как у прототипа уровень колеблется на 15- 30 мм, т.е. в десятки раз больше, чем у заявляемого регулятора.
Сохранение постоянного уровня данного регулятора поясняется на примере бытового пружинного безмена (фиг.2). Если цена делений на безмене между килограммами равна 1 см, а высота грузов также равна 1
см, то, подвешивая последовательно такие грузики на безмен, можно заметить, что верхний край грузиков будет всегда на одном уровне. То же самое происходит и с емкостью, заполненной жидкостью (фиг.З). Для
данной емкости всегда можно подобрать пружину, когда при заполнении емкости жидкостью или ее расходе уровень этой жидкости будет постоянным, причем коэффициент жесткости k пружины будет прямо
пропорционален свободной поверхности жидкости S,, плотности этой жидкости р, ускорению свободного падения g и определяется по формуле
k S-p jj .
Эта формула определяется из условия равновесия емкости с жидкостью и силы пружины
G F. . :.. . .. -где G - вес жид кости (весом емкости пренебрежем, т.к. он постоянен)
G Ah-S-pfl,
где V - объем жидкости;
S - площадь свободной поверхности;
р- плотность жидкости;
g - ускорение свободного падения;
ДЬ - высота столба наливаемой жидкот сти;
F Дх-k- по закону Гука;
Дх - величина сжатия пружины; k - коэффициент жесткости пружины, приравняем
Ah-S p-g Ax-k.
Но для постоянства уровня необходимо, чтобы высота столба доливаемой жидко- сти Ah равнялась прогибу (сжатию) пружины Ах, т.е. Ah Ах.
Сократив обе части уравнения на эти величины, получим
k .
Т.о. это условие является необходимым и достаточным, чтобы поддерживать постоянный уровень жидкости в емкости с высокой точностью независимо от величины ее расхода. При установке задающей емкости на несколько пружин коэффициент жесткости k уменьшается в п раз, где п - количество пружин..
При использовании предлагаемого устройства повышается точность регулйроба- ния за счет исключения налипания жидкости на элементы датчика и Надежность регулятора за счет исключения разрушения датчика в результате коррозии. Данный регулятор используется в комплексе по очистке пылегазовой смеси асфальтос- месительной установки и позволяет повысить надежность и безотказность всей установки.
Формула изобретения
Регулятор уровня жидкости, содержащий задающую емкость, установленную с возможностью вертикального перемещения, сообщенную с расходной емкостью,
датчик уровня, связанный с исполнительным механизмом, установленным на трубопроводе подачи рабочей жидкости, отличающийся тем, что, с целью повышения точности и надежности, он содержит закрепленный на расходной емкости корпус, в котором закреплен датчик уровня, задающая емкость установлена в корпусе на пружинах и имеет закрепленные на ней упоры, контактно связанные с датчиком уровня,
причём коэффициент жесткости пружин определяется по формуле
V-S -р-д
.--.-. JS, f
-п где k - коэффициент жесткости пружины;
S - площадь свободной поверхности жидкости в задающей емкости; р -плотность жид кости; g - ускорение свободного падения; п - количество пружин.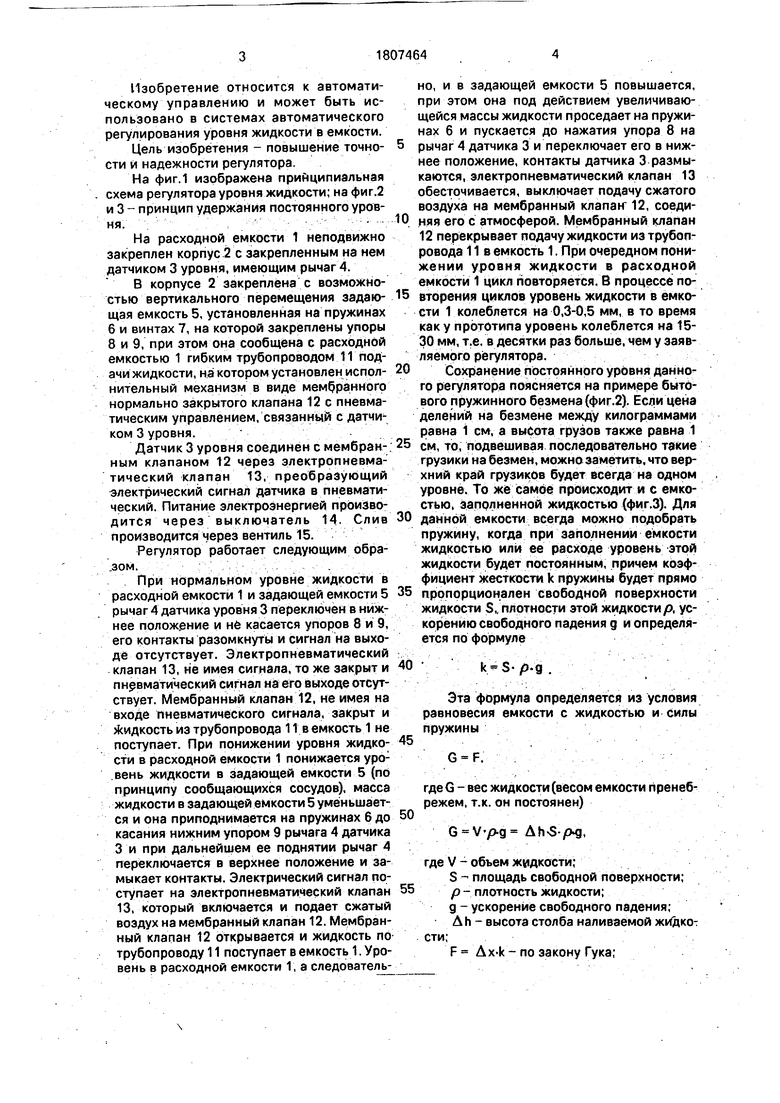
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ПЕННОЙ ФЛОТАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2011420C1 |
| Регулятор уровня в ванне красочной камеры | 1982 |
|
SU1084756A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДНОЙ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ТРАКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582486C1 |
| Устройство для регулирования уровня | 1978 |
|
SU742887A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294556C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА | 2002 |
|
RU2216762C1 |
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2548837C2 |
| Газовый редуктор | 1979 |
|
SU911485A1 |
| Устройство для розлива жидкостей | 1989 |
|
SU1701623A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ ФЛОТОРЕАГЕНТОВ | 2015 |
|
RU2583130C1 |
Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического регулирования уровня жидкости в емкости. Цель изобретения - повышение точности и надежности. Регулятор содержит задаю/ Электропитание 2 щую емкость 5, установленную с возможностью вертикального перемещения, сообщенную с расходной емкостью 1, на которой закреплен датчик 3 уровня, связанный с исполнительным механизмом, установленным на трубопроводе 11 подачи рабочей жидкости. На корпусе задающей емкости 5 закреплены упоры 8 и 9 с возможностью контактирования с датчиком 3 уровня, а задающая емкость 5 установлена на пружинах 6, коэффициент жесткости которых определяется по формуле к Где коэффициент жесткости пружины 6; S - площадь свободной поверхности жидкости в задающей емкости 5: g - ускорение свободного падения; п - количество пружин 6. 3 ил, -с Сжатый воздух w Ё
| Устройство для регулирования уровня жидкости в емкости | 1982 |
|
SU1034019A1 |
| Регулятор уровня в ванне красочной камеры | 1982 |
|
SU1084756A1 |
