Изобретение относится к машиностроению, к регулируемым и управляемым подвескам транспортных средств.
Для предотвращения пробоя подвески, повышения эффективности гашения колебаний, описываемых уравнением
у+2 Ју+ Шо2у Wo2 , (t)+2of (t). (I)
сгде у - вертикальное перемещение подрессоренных масс;
rj- ткущее значение радиуса дорожной неровности;
е- коэффициент демпфирования амортизатора;
сое, - собственная частота колебаний подрессоренных масс осуществляют изменение сопротивления hf. амортизатора по закону
tj(i)
(2)
где &Ј - изменение сопротивления амортизатора.
Для осуществления такого закона управления активная подвеска транспортного агрегата содержит 2 емкостных датчика, один из которых установлен перед передним колесом транспортного средства, другой на днище транспортного средства на равных расстояниях от поверхности земли. Имеется электрод, контактирующий с поверхностью земли и подключенный к первой диагонали мостовой схемы, состоящей из потенциометров и датчиков. Другая диагональ мостовой схемы запитывается от генератора высокой частоты, а в первую диагональ включен детектор с выходом на операционный усилитель.
00
о
00 VJ
N
ел
Второй операционный усилитель подключен к массе через резистор.
В ыход первого операционного усилителя подключен к первой обмотке электромагнитного клапана гидравлического амортизатора, а выход второго операционного усилителя подключен ко второй обмотке электромагнитного клапана. Обмотки расположены на магнитопроводах с зубцами, которые расположены над зубчатым магнитопроводом цилиндрической задвижки. В средней части задвижка закреплена на штоке амортизатора, а в нижней части задвижка подвижно установлена в кольцевой выемке поршня амортизатора. Поршень имеет входные и выходные клапаны, которые сообщают пространство под поршнем амортизатора с пространством над поршнем амортизатора через отверстия в цилиндрической задвижке.
При движении транспортного средства по ровному участку дороги расстояние от поверхности земли до пластин датчиков одинаково, поэтому мостовая схема сбалансирована и гидравлический амортизатор имеет минимальное сопротивление.
При появлении на дороге перед транспортным средством неровности, радиус которой вызывает в подвеске удары или колебания корпуса средней частоты со значительными амплитудами, расстояние между пластиной датчика, установленного перед передним колесом, и поверхностью дороги, изменяется по сравнению с расстоянием от второго датчика, на днище, до поверхности дороги. Баланс мостовой схемы нарушается и на его диагонали появляется сигнал, пропорциональный величине неровности на дороге. Поступивший сигнал приводит в действие рабочую схему, в результате чего сопротивление амортизатора увеличивается на величину, пропорциональную величине неровности на дороге. Поскольку интенсивность воздействия одной и той же неровности дороги на подвеску и амортизатор зависит от скорости движения транспортного средства и с увеличением скорости все более приобретает характер удара, то сопротивление амортизатора должно увеличиваться пропорционально скорости движения для ликвидации пробоев в подвеске. Для этого служит датчик скорости движения транспортного средства (штатный спидометр), к приводу которого кинематически подключен потен циометр, сопротивление которого увеличивается пропорционально скорости движения. Таким образом, чем больше скорость движения транспортного средства, тем больше величина сопротивления и уве-
личивается жесткость амортизатора на величину, необходимую для ликвидации пробоя в подвеске при данной скорости движения транспортного средства. 5Закон управления (2) по авт.св. N; 1461650 обеспечивает лишь защиту подвески от пробоя и не улучшает плавность хода транспортного средства.
10 Это является следствием того, что:
1. Емкостные датчики установлены на днище транспортного средства (раме) и поэтому управление жесткостью амортизатора фактически осуществляется не по
15 величине дорожной неровности, как утверждается в описании изобретения, а по величине геометрической разности амплитуды колебаний и перемещения объекта, а управление по величине радиуса дорожной неров20 ности осуществляется только до момента наезда колес на неровность.
2. Закон, предусматривающий только увеличение коэффициента сопротивления амортизатора по скорости движения к радиу25 су дорожной неровности не приводит к улучшению плавности хода, т.к. его изменение должно происходить по программе, вытекающей из характера колебаний транспортного средства и характеристик дорожных неровно30 стей. Кроме того, при изменении амплитуды колебаний жесткость амортизатора должна изменяться не прямопропорционэльно частоте и амплитуде дорожных неровностей, а пропорционально квадрату частоты кинема35 тического возбуждения со стороны дороги и обратно пропорционально квадрату амплитуды дорожных неровностей,
Указанное доказывается следующим: известно, что для транспортного сред 0 ства колебания возникают в результате кинематического возбуждения со стороны дороги и описываются при наличии амортизатора в подвеске уравнением вида (1). В этом случае заменой переменных
45
yftKWe (3) оно приводится к стандартному виду 50 Ј (t)+ wz Ј (t) (t) од,2+2 vj e& сЛ(г); (4) t(, , где (i ah2-a.
Co К Co
55
или a
jЈ
M
к: с
M M
(40
где М -- приведенная к оси масса;
Со - жесткость упругого элемента;
k - сопротивление амортизатора.
Принципиальным здесь является то, что от коэффициента демпфирования зависит как левая часть уравнения (4), так и правая, поэтому при осуществлении колебаний необходимо сопротивление амортизатора или жесткость (С) согласно (41) менять по некоторому закону, определяемому как характером неровностей, так и характером колебаний.
Цель изобретения - повышение плавности хода и эффективности гашения колебаний.
Поставленная це ль достигается тем, что измеряется скорость движения транспортного средства, длина волны дорожной неровности, амплитуда дорожной неровности и формируется сигнал на изменение жесткости, пропорциональный квадрату скорости движения транспортного средства и обратно пропорциональный квадратам длины волны и амплитуды колебаний дорожной неровности согласно формуле
С учетом этого, уравнение (4) будет иметь
вид:
| + аЈ+(1 +Р)|(Ыо(1 +Р)7, (7)
где
АС
р гV43
(8)
Для определения оптимального закона изменения жесткости используется метод принци/ia максимума Л.С.Понтрягина. Со- гласно этого метода оптимальное значение управления р находится из условия максимума функции Гамильтониана Н
vЈ + Vt ™(Ј V р). О)
Здесь р - область допустимого изменения р; ip - переменная сопряженного уравнения


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демпфирования вынужденных колебаний объекта | 1990 |
|
SU1787810A1 |
| Активная подвеска транспортного средства | 1986 |
|
SU1461650A2 |
| САМОРЕГУЛИРУЕМЫЙ ГИДРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2024 |
|
RU2831315C1 |
| Задняя подвеска транспортного средства | 2021 |
|
RU2769203C1 |
| ДВУХРЕЖИМНАЯ СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2705472C1 |
| Способ защиты экипажа и оборудования наземного бронированного транспортного комплекса с колёсной самоходной обитаемой эвакокапсулой | 2019 |
|
RU2710867C1 |
| АКТИВНАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019439C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2312029C2 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| ПОДВЕСКА ХОДОВОЙ ЧАСТИ АВТОМОБИЛЯ | 2014 |
|
RU2570014C2 |
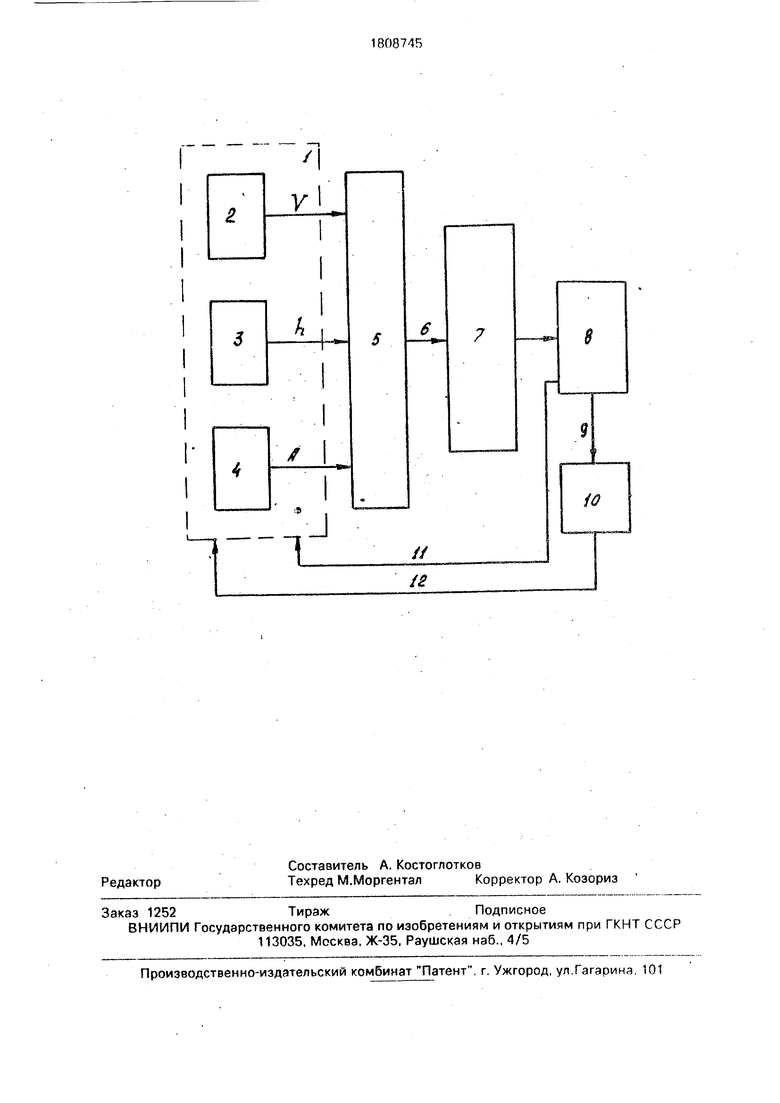
Изобретение относится к машиностроению, в частности к регулируемым и управляемым подвескам транспортных средств. Сущность изобретения: измеряется скорость движения транспортного средства, длина волны дорожной неровности, амплитуда дорожной неровности и формируется сигнал на изменение жесткости амортизатора по закону, который формируется системой контроля и измерения параметров состояния объекта, демпфирующего устройства и дорожного покрытия, содержащую подсистему измерения скорости движения объекта, перемещение упругого элемента демпфирующего устройства, измерения параметров дорожных неровностей и подсистему формирования команд, которая выдает управляющий сигнал на устройство регулирования жесткости демпфирующего устройства, которое через кинематические звенья осуществляет воздействие на объект, а сигналы о состоянии демпфирующего устройства и объекта по каналам обратной связи подаются на вход системы контроля и измерения параметров состояния объекта. 1 ил. СО С
где Mk - приведенная к оси масса транспортного средства;
v - скорость движения транспортного средства;
S -длина волны дорожной неровности;
т/о - амплитуда дорожной неровности;
hg - динамический ход подвески.
Полученный закон доказывается следующими положениями:
Пусть в качестве критерия, характеризующего эффективность гашения колебаний, назначено время гашения колебаний так, чтобы в момент окончания процесса амплитуда колебаний Ak не превышала заданной величины, а время при этом было бы минимальным. Т.е. математическая формулировка цели оптимизации будет следующая:
tk
min
(5)
1/2
t-tk. $+%/afi Ak,
. .. из которого следует, чтобы управление было
В качестве оптимизирующей функции уп- 55 оптимальным и доставляло максимум га- равления выберем отклонение жесткости МИЛЬтониануН, необходимо выполнение ус- упругого элемента от его номинального значения Со
ловия:
АС С-Со .
(6)
30
которое в развернутом виде записывается так:
35
+оё(1+Р)0 0.
(11)
Краевые значения для сопряженной временной получим из условий трансверсальности при .
Здесь они имеют вид
уъ А & ; t/s -AЈk/Ak,(12) Akuf
H(Јk,Vk. P,tk)0,
где А- множитель Лагранжа.
Раскрывая выражение (9) с помощью(7). будем иметь
н -1-н/Ј+(), С13)
оптимальным и доставляло максимум МИЛЬтониануН, необходимо выполнение
ловия:
(-ЈДО ,
(14)
Ј
ПоО) J-a
{vsintwt - cuslmtf+
-f jcosort + sinon.
L
(16)
V 7ЈuJЈj + is|nQ tJ + i--t)
-twii±
Т ft)
X COSft/t I + 1 -1)1,лп „Я .,2JA/
v J алг-i у;
где Јj - значение основной переменной при
j (в начальный момент времени);тогда Ј}- откуда
Јн-1 - значение основной переменнойv при (в конечный момент времени). 45
ле а - ,
Пусть , Tj+i 1. tjo В момент t n, ij ( TI) %(т 1), т.е.
(П) - /(ri) {vsinwri - wsinvn - osivt J1°V 9 toslnQ i - vslnvn Oj(17) к -or
Из условия (17) определяется момент переключения п управления. Перемещение и скорость перемещения в этот момент будут
где hg - динамический ход 50 и величину изменения жес мо изменить с учетом част ского возбуждения колеб движения агрегата, длины сти), амплитуды неровнос 55 верхности дороги, допуст амплитуды колебаний т средства.. На последующ t TJ + 1 величина и зн ются аналогично.
На последующих интервалах t E ц, TJ + знак управления меняется периодически.
Таким образом, решение построено полностью.
Рассмотрим на примере движения системы на интервале t E{0, r-i порядок вычисления жесткости упругого элемента.
Пусть допустимое значение Јi задано, iHhgHH
(21)
tjo
где hg - динамический ход подвески, и величину изменения жесткости необходимо изменить с учетом частоты кинематического возбуждения колебаний v (скорости движения агрегата, длины волны неровности), амплитуды неровностей опорной по- верхности дороги, допустимого значения амплитуды колебаний транспортного средства.. На последующих интервалах t TJ + 1 величина и знак ДС определяются аналогично.
| Понтрягин Л.С | |||
| Математическая теория оптимального управления | |||
| М., Наука, 1979 | |||
| Активная подвеска транспортного средства | 1986 |
|
SU1461650A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
