Изобретение относится к машиностроению и может найти применение при изготовлении регулируемых и управляемых подвесок транспортных средств.
Известны различные способы демпфирования колебаний объекта, основанные на введении в устройство различных активных систем управления по скорости и перемещению объекта (подрессоренных масс), а также управляемых подвесок переменной жесткости, перенастраиваемых в зависимости от загрузки транспортного средства.
Эффективность гашения колебаний объекта с помощью указанных устройств невысока и ограничена узким диапазоном параметров внешнего воздействия (его спектром частот и амплитуд).
Ближайшим аналогом предложенного изобретения является устройство гашения колебаний объекта, содержащее из двухкамерного пневматического амортизатора с перепускным электроклапаном и вспомогательным оборудованием, предусматривающее измерение перемещения у и скорости у объекта с помощью датчика ускорений, расположенного на объекте и изменение с помощью блока управления жесткости С амортизатора по закону
С С0+ AClsign(yy).(1) где Со - начальное значение жесткости;
j А С допустимое значение изменения жесткости.
Закон изменения жесткости (1) является оптимальным только для систем, поведение которых описывается уравнением вида
у+а/2 y P(t),
t 0, у у0, у уо,(У) В применении к задаче управления жесткостью демпфирующего элемента это означает, что при использовании управляющего закона (1) эффективно гасятся только колебания, которые возбуждаются в результате силового воздействия P(t), независящего от состояния амортизатора, а начальные значения ус, уо определяются только параметрами возмущающей нагрузки P(t). Известно, что при движении транспортных средств, возникают колебания кинематического возбуждения со стороны поверхности дорог, имеющих неровности q(t) и изменяющих на эту величину состояние амортизатора.
Целью изобретения является повышение эффективности гашения кинематически возбуждаемых колебаний,
Поставленная цель достигается тем, что изменение жесткости С демпфирующего элемента осуществляют по закону
С Со-|А Cjsignye ,(3)
где Б у - q(t) - деформация упругого элемента.
На фиг. 1 изображена структурная схема способа; на фиг. 2 - сравнение процессов
колебаний объекта при демпфировании по предложенному закону и по закону, обоснованному в прототипе.
Система контроля и измерения параметров состояния объекта и демпфирующего устройства 1, содержащая подсистему измерения скорости и перемещения объекта 2, выполненную, например, в виде датчика ускорений с последовательно подключенным к нему апериодическим звеном, подсистему измерения перемещения упругого элемента демпфирующего устройства 3, выполненного, например, в виде емкостного датчика, и подсистему формирования команд 4, содержащую, например, систему соединенных в определенном порядке реле, вырабатывающую сигнал 5, который подается на устройство регулирования жесткости 6, выполненное, например, в виде управляемого
электро-пневмоклапана, разъединяющего полости пневмоцилиндра демпфирующего устройства 7, воздействующего через кинематические звенья 8 на объект 9, при это сигналы о состоянии демпфирующего устройства 7 и объекта 9 по каналам обратной связи 10, 11 подаются на выход системы контроля и измерения параметров состояния 1.
Сущность и предлагаемый закон изменения жесткости поясняется следующим,
Структура уравнений, описывающих поведение системы с кинематическим возбуж- дением колебаний, например, для одномассной системы, имеет вид
У + о;2 у о/2 q(t),(4) где q(t) - высота неровности дороги (начальная величина деформации упругого элемента демпфирующего устройства). Принципиальное отличие уравнений (4), (2) состоит в том, что правая часть уравнения (4) существенно зависит от жесткости демпфирующего устройства С
. (5)
Решение оптимизационной задачи в применении к уравнению (4) с привлечением принципа максимума Л.С.Понтрягина (1) дает следующий закон изменения жесткости
С С0- {ACisingyE ,(6) где е - величина деформации упругого элемента
Ј y-q(t) (7)
Закон изменения жесткости (6) существенно отличается от закона (1), осуществляемого в прототипе тем, что учитывает предварительное состояние демпфирующего элемента, это дает возможность управ- лять кинематически возбуждаемыми колебаниями. На фиг. 2 приведены в сравнении результаты расчетов амплитуды колебаний упругого элемента амортизатора, выполненные на ЭВМ при численном интег- рировании уравнения (2) с законом управления (1), осуществляемом в прототипе - прерывистая линия, и уравнения (4) с предлагаемым законом изменения жесткости (6) -сплошная линия, при P(t)j P|sln % t,q(t) iq| sin t, Шо 10,0 Гц, Со 10 кг/с . Сравнение кривых показывает, что амплитуда колебаний в предложенном случае зна- чительно ниже, что свидетельствует о повышении эффективности демпфирования с учетом предварительного состояния упругого элемента.
Формула изобретения
Способ демпфирования вынужденных колебаний объекта, заключающийся в том, что измеряют скорость перемещения объекта и изменяют жесткость упругого элемента амортизатора, отличающийся тем, что, с целью повышения эффективности гашения колебаний за счет учета колебаний кинематического возбуждения, измеряют деформацию упругого элемента, а жесткость С изменяют по закону
С С0- |AC signyЈ , где е у - q(t) - деформация упругого элемента;
Со - начальное значение жесткости;
/ ДС - допустимое значение изменения жесткости;
у - величина перемещения объекта;
у - скорость перемещения объекта;
q(t) - величина предварительной деформации упругого элемента (высота неровности дороги),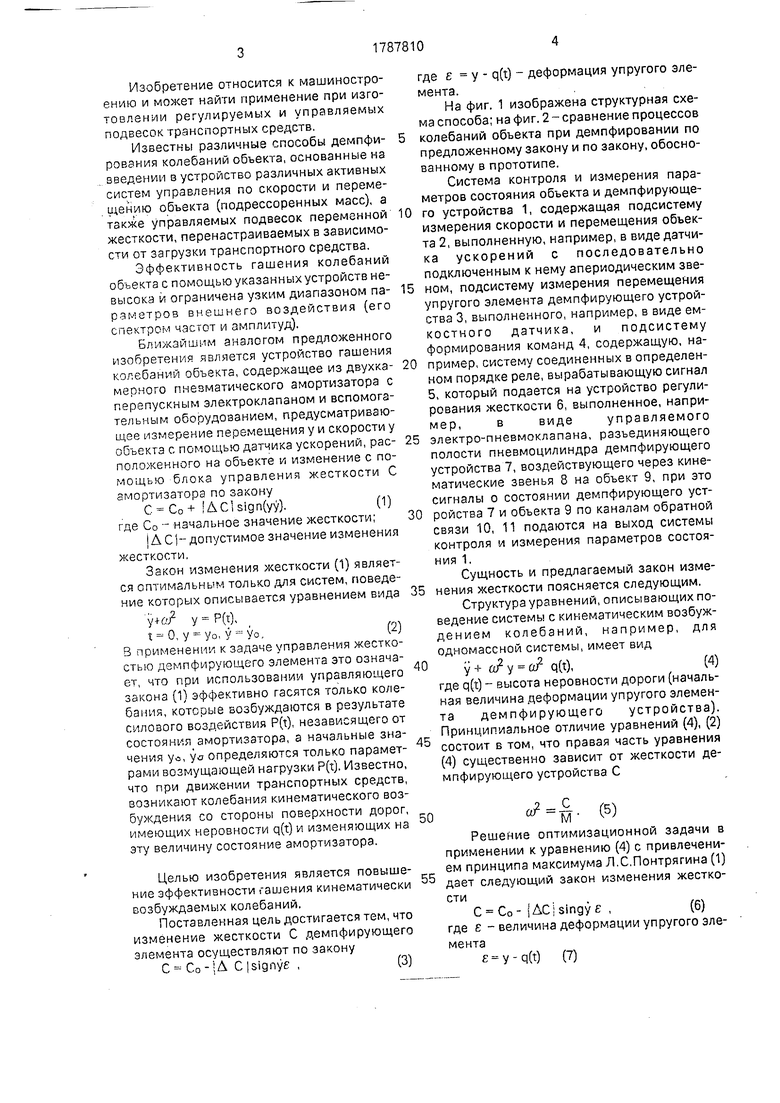
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптимального демпфирования вынужденных колебаний транспортного агрегата | 1991 |
|
SU1808745A1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ УПРУГОПОДВЕШЕННОГО ОБЪЕКТА | 1999 |
|
RU2162034C1 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| КОНТЕЙНЕРОВОЗ | 2000 |
|
RU2174921C1 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| СПОСОБ ИСПЫТАНИЙ УЗЛОВ ТРЕНИЯ | 2006 |
|
RU2343450C2 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| КОНТЕЙНЕРОВОЗ | 2002 |
|
RU2217329C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| ДЕМПФЕР ВЯЗКОГО ТРЕНИЯ | 2019 |
|
RU2723102C1 |
Изобретение относится к машиностроению, в частности к управляемым подвескам транспортных средств. Измеряют деформацию подвески и формируют сигналы управления жесткостью по закону С Со -|А С| sign у Ј . где Ј у - q(t) - деформация подвески; С0 - начальное значение жесткости упругого элемента; АС - допустимое значение изменения жесткости; у - скорость перемещения объекта; у- перемещение объекта; q(t) - величина предварительной деформации упругого элемента (высота неровностей дороги). Закон управления жесткостью реализуется в виде системы контроля и измерения параметров состояния объекта демпфирующего устройства 1, содержащей подсистемы измерения скорости, перемещения объекта 2 и перемещения упругого элемента демпфирующего устройства 3 и подсистему формирования команд 4, которая выдает управляющий сигнал 5 на устройство регулирования жесткости 6 демпфирующего устройства объекта, которое через кинематические звенья 8 осуществляет воздействие на объект 9, а сигнал о состоянии демпфирующего устройства и объекта по каналам обратной связи 10, 11 подается на вход системы контроля и измерения параметров состояния 1. 2 ил. со с
| Понтрягин Л.С | |||
| Математическая теория оптимального управления, М., Наука, 1976, с | |||
| Прибор для нанесения на чертеж точек при вычерчивании углов и треугольников | 1922 |
|
SU392A1 |
| Устройство для гашения колебаний объекта | 1974 |
|
SU568770A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
