Изобретение относится к измерительной технике и может быть использовано для контроля характеристики пружин в диапазоне их рабочих деформаций.
Цель изобретения - повышение эффективности устройства за счет возможности контроля характеристик пружин во всем диапазоне.
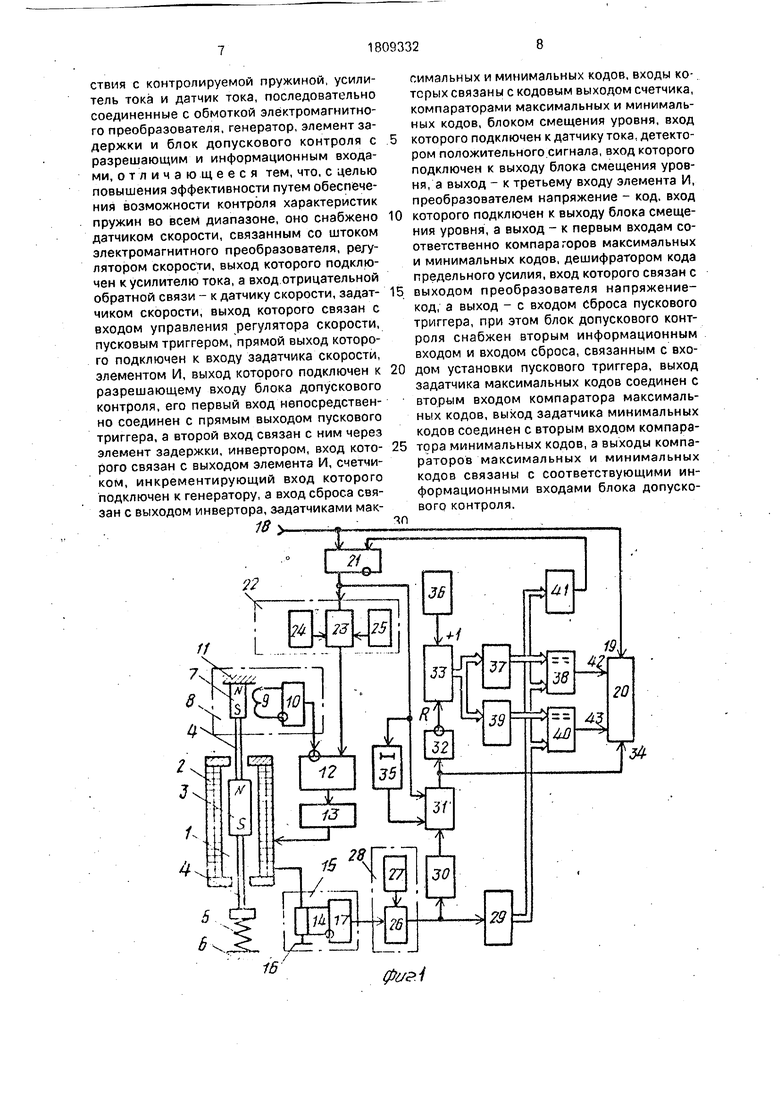
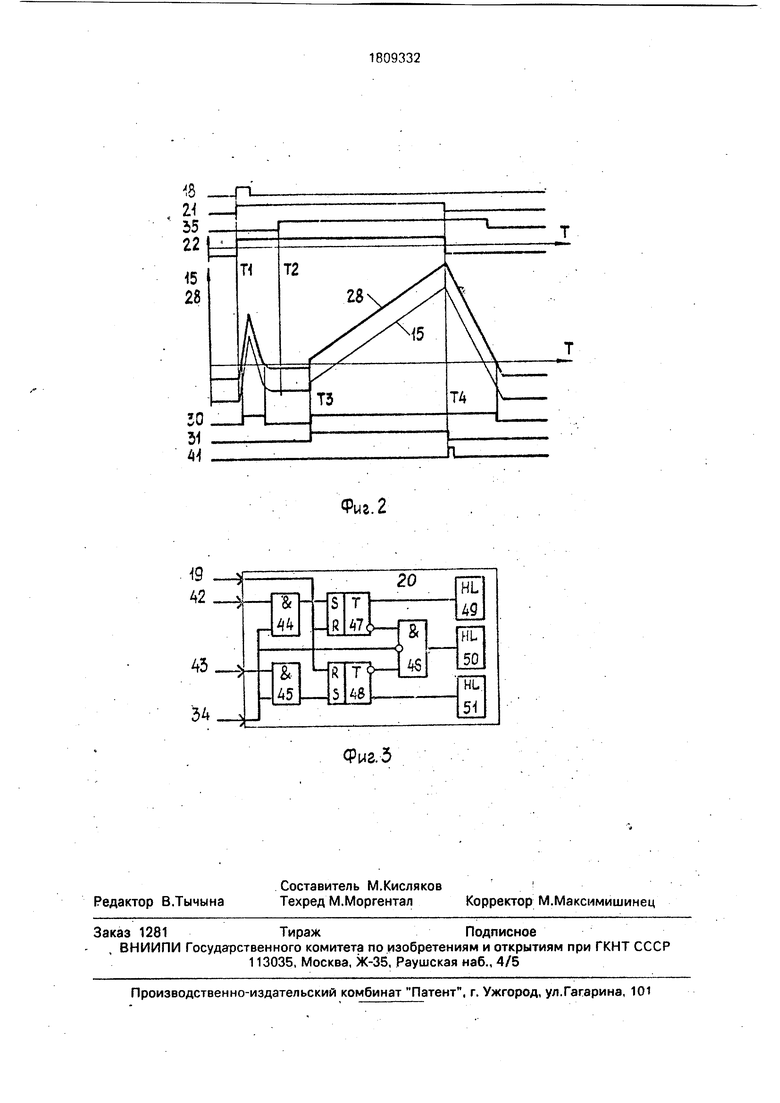
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - временная диаграмма его работы; на фиг. 3 - блок допускового контроля.
Устройство для контроля пружин содержит электромагнитный преобразователь 1, включающий соленоид 2 большой длины и постоянный магнит 3, который установлен на штоке 4, установленном с возможностью воздействия на контролируемую пружину 5, помещаемую в позицию контроля с опорой 6. На другом (верхнем) вылете штока 4 закреплен небольшой постоянный магнит 7 датчика 8 скорости штока. Магнит 7 размещен внутри катушки 9 индуктивности, подключенной к прямому и инвертирующему входам операционного усилителя 10. Верхняя опора 11 служит для ограничения перемещения штока 4 вверх.
Выход операционного усилителя 10 датчика скорости 8 соединен с входом отрица- тельной обратной связи регулятора скорости 12, выход которого через усилитель тока 13 связан с первым выходом соленоида 2, другой вывод которого через шунт 14датчикатока 15 связан собщей шиной 16 устройства. Потенциальные выводы шунта 14 подключены к входам операционного усилителя 17 датчика тока 15.
Пусковая шина 18 устройства соединена с входом 19 сброса блока 20 допускового контроля и с установочным входом пускового триггера 21, прямой выход которого через эадатчик 22 скорости связан с управляющим входом регулятора скорости 12. Задатчик скорости 22 включает мультиплексор 23, задатчик рабочей скорости 24 и задатчик скорости возврата 25.
(А С
00
о ю со со ю
Выход операционного усилителя 17 датчика тока 15 подключен к входу сумматора 26, входящего вместе с источником 27 опорного напряжения в блок смещения уровня 28. Выход его соединен с входом преобразователя 29 напряжение-код и с входом детектора 30 положительного сигнала, выход которого через элемент И 31 и инвертор 32 связан со входом сброса счетчика 33. Выход элемента И 31 подключен также к разрешающему входу 34 блока 20 допускового контроля. Другой вход элемента И через элемент задержки 35 связан с прямым выходом пускового триггера 21.
Инкрементирующий вход счетчика 33 подключен к выходу генератора 36, а кодовый выход счетчика 33 через задатчик максимальных кодов 37 связан с опорным входом компаратора 38 максимальных кодов, а через задатчик минимальных кодов 39 связан с опорным входом компаратора 40 минимальных кодов. Другие входы компараторов 38 и 40 соединены с выходом преобразователя 29 напряжение-код и со входом дешифратора 41 кода предельного усилия, выход которого подключен к входу сброса пускового триггера 21. Этот триггер имеет так:хе вход для сброса в исходное положение (не показан). Выходы компараторов 38 и 40 соединены с информационными входами 42 и 43 блока 20 допускового контроля.
Блок 20 допускового контроля содержит (фиг. 3) три элемента И 44-46, два триггера 47 и 48 и три индикатора 49-51.
Устройство работает следующим образом,
В исходном состоянии пусковой триггер 21 находится в нулевом состоянии. Потенциал низкого уровня с его прямого входа через элемент задержки 35 и элемент И 34 поступает на разрешающий вход 34 блока 20 допускового контроля, где через элементы И 44 и 45 запрещает прохождение сигналов на установочные входы триггеров 47 и 48.
Одновременно низкий потенциал с прямого выхода пускового триггера 21 посредством мультиплексора 23 подключает отрицательный потенциал с выхода задат- чика скорости возврата 25 к управляющему входу регулятора скорости 12. Последний вырабатывает отрицательный потенциал, который через усилитель тока 13 создает ток через соленоид 2 электромагнитного преобразователя 1. Под действием этого тока создается магнитный поток, перемещающий силовой постоянный магнит 3 со штоком 4 вверх. При этом постоянный магнит 7 датчика скорости 8 наводит в катушке индуктивности 9 ЭДС, пропорциональную скорости движения. Эта ЭДС преобразуется опера- - ционным усилителем 10 в напряжение сигнала отрицательной обработкой связи
регулятора скорости 12. При достижении верхней опоры 11 шток 4 останавливается и удерживается в этом положении.
После установки очередной пружины 5 в позиции контроля на нижнюю опору 6 по
шине 18 поступает пусковой импульс (момент времени Т1 на фиг. 2), устанавливающий пусковой триггер 21 в единичное состояние. Высокий потенциал с его прямого выхода посредством мультиплексора 23
5 подключает положительный сигнал, пропорциональный рабочей скорости штока, с выхода задатчика рабочей скорости 24 к управляющему входу регулятора скорости 12. Последний через усилитель 13 создает ток,
0 необходимый для движения постоянного магнита 3 со штоком 4 вниз со стабильной рабочей скоростью. Пока шток 4 не касается пружины 5, он под действием веса опускается вниз. При этом, пока скорость не дости5 . величины рабочей скорости, положительный ток через электромагнитный преобразователь 2 создает значительное усилие, ускоряющее движение штока 4 в начальный момент. По мере увеличения
0 скорости движения штока 4 возрастает ЭДС, наводимая магнитом 7 в катушке 9, возрастает и сигнал обратной связи, поступающий с операционного усилителя 10 на регулятор скорости 12. Ток через прегбра5 зователь сначала уменьшается, затем меняет знак и устанавливается на уровне, необходимом для поддержания заданной скорости.
В момент времэни Т2 элемент задержки
0 35 разрешает прохождение сигналов с детектора 30 положительного сигнала. Однако величина напряжения источника 27 в блоке смещения уровня 28 такова, что в установившемся состоянии движения штока 4 вы5 ходной сигнал датчика тока 15 смещается блоком 28 в положительном направлении, но остается отрицательным. Поэтому низкий потенциал с выхода детектора 30 через элемент И 31 запрещает работу блока допу0 скового контроля 20, а также через инвертор 32 удерживает в нулевом состоянии счетчик - 33.
При касании штоком 4 контролируемой пружины 5 последняя начинает противодей5 стовать штоку 4, поэтому отрицательный ток уменьшается (момент времени ТЗ), а сигнал на выходе блока 28 смещения уровня становится положительным. Выходной сигнал детектора 30 положительного сигнала принимает значение логической единицы.
Нулевой сигнал с выхода инвертора 32 прекращает сброс счетчика 33. который начинает инкрементироваться импульсами с генератора 36. Поскольку скорость движения штока 4 стабильна, то начиная с момента времени ТЗ, приращения счетчика 33 пропорциональны величине деформации пружины 5. Код величины деформации с выхода счетчика 33 поступает на задатчики 37 и 39, представляющие из себя постоянные запоминающие устройства. В задатчике максимальных кодов 37 для каждого значения входного кода, пропорционального деформации пружины, хранится величина максимально допустимого для данной деформации усилия. Код этого максимально допустимого усилия при соответствующей деформации поступает на опорный вход компаратора 38 максимальных кодов. За- датчик минимальных кодов 39 при тех же значениях деформации пружины выдает код минимально допустимых усилий на опорный вход компаратора 40 минимальных кодов.
На другие входы компараторов 38 и 40 при каждом значении деформации поступает код фактического усилия при данной деформации. Усилие измеряется посредством датчика тока 15. Действительно величина тока через электромагнитный преобразователь 1 пропорциональна величине усилия, если в диапазоне перемещений магнита 3 магнитное поле имеет одинаковую форму, Для этого соленоид 2 имеет большую длину, а магнит 3 работает в средней его части. Пропорциональный усилию ток преобразуется датчиком тока 15 в пропорциональное усилию напряжение. Однако это напряжение пропорционально усилию за вычетом веса штока 4 с магнитами 3 и 7. Для приведения напряжения в соответствие с усилием пружины в блоке 28 смещения уровня к измеряемому напряжению прибавляется напряжение, пропорциональное весу штока 3, 4, 7. Поэтому напряжение на выходе блока смещения уровня 28 пропорционально фактическому усилию пружины при данной деформации. Это напряжение преобра- зователем 29 преобразуется в код, пропорциональный фактическому усилию при данной деформации пружины. Этот код в компараторах 38 и 40 сравнивается с граничными значениями.
Если код фактического усилия для каждого значения деформации находится в границах между соответствующими данной деформации кодами максимального и минимального усилий, то сигналы на выходах компараторов 38 и 40 имеют низкий уровень и триггеры 47 и 48 в блоке допускового
контроля 20 остаются в нулевом состоянии. Если код фактического усилия хотя бы для одного из значений деформации пружины превышает соответствующий максималь- 5 ный код из зэдатчика 37, то высокий потенциал с выхода компаратора 38 через вход 42 блока допускового контроля 20 и элемент И 44 устанавливает триггер 47 в единичное состояние. При этом немедленно включает0 ся индикатор брака 49, свидетельствующий об отклонении усилия в большую сторону. Если же фактическое усилие хотя бы для одного из значений деформации пружины меньше соответствующего минимального
5 кода из задатчика 39, то высокий потенциал с выхода компаратора 40 в блоке 20 допускового контроля через вход 43 и элемент И 45 устанавливает в единичное состояние триггер 48, включающий индикатор брака
0 51, свидетельствующий об отклонении усилия в меньшую сторону.
Воздействие на пружину и контроль усилий для каждого значения ее деформации осуществляется до тех пор, пока дешиф5 ратор 41 кода предельного усилия не сбросит пусковой триггер 21, С этого момента (Т4) элементы И 31, 44, 45 закрыты и изменение состояния триггеров 47 и 48 невозможно. Если до этого момента фэктиче0 ское усилие для каждого значения деформации было в границах между допустимыми значениями, то триггеры 47 и 48 остаются в нулевом состоянии. Нулевой сигнал, поступающий через вход 34 блока 20
5 допускового контроля разрешает прохождение сигналов через элемент И 46 (разрешающий вход имеет инверсию). Поэтому элемент И 46 включает индикатор 50 свидетельствующий о годности пружины.
0 Если же хотя бы один раз за период контроля от ТЗ до Т4 фактическое усилие выходило за допустимые границы хотя бы для одного из значений деформации пружины и был установлен хотя бы один из триг5 геров 47 и 48, то сразу включается соответствующий индикатор брака 49 или/и/ 51, но индикатор годности 50 не включается.
Одновременно с закрытием элемента И
0 31 в момент времени Т4 пусковой триггер 21 переключает задатчик скорости 22, обеспечивающий вывод штока 4 в исходное верхнее положение.
5 Формула изобретения
Устройство для контроля пружин, содержащее опору для установки контролируемой пружины, электромагнитный преобразователь с обмоткой и штоком, установленным с возможностью взаимодействия с контролируемой пружиной, усилитель тока и датчик тока, последовательно соединенные с обмоткой электромагнитного преобразователя, генератор, элемент задержки и блок допускового контроля с разрешающим и информационным входами, отличающееся тем, что, с целью повышения эффективности путем обеспечения возможности контроля характеристик пружин во всем диапазоне, оно снабжено датчиком скорости, связанным со штоком электромагнитного преобразователя, регулятором скорости, выход которого подключен к усилителю тока, а вход отрицательной обратной связи - к датчику скорости, задат- чиком скорости, выход которого связан с входом управления регулятора скорости, пусковым триггером, прямой выход которого подключен к входу задатчика скорости, элементом И, выход которого подключен к разрешающему входу блока допускового контроля, его первый вход непосредственно соединен с прямым выходом пускового триггера, а второй вход связан с ним через элемент задержки, инвертором, вход которого связан с выходом элемента И, счетчиком, инкрементирующий вход которого подключен к генератору, а вход сброса связан с выходом инвертора, задатчиками максимальных и минимальных кодов, входы ко-. тсрых связаны с кодовым выходом счетчика, компараторами максимальных и минимальных кодов, блоком смещения уровня, вход
которого подключен к датчику тока, детектором положительного сигнала, вход которого подключен к выходу блока смещения уровня, а выход - к третьему входу элемента И, преобразователем напряжение - код, вход
которого подключен к выходу блока смещения уровня, а выход - к первым входам соответственно компараторов максимальных и минимальных кодов, дешифратором кода предельного усилия, вход которого связан с
выходом преобразователя напряжение- код, а выход - с входом сброса пускового триггера, при этом блок допускового контроля снабжен вторым информационным входом и входом сброса, связанным с входом установки пускового триггера, выход задатчика максимальных кодов соединен с вторым входом компаратора максимальных кодов, выход задатчика минимальных кодов соединен с вторым входом компаратора минимальных кодов, а выходы компараторов максимальных и минимальных кодов связаны с соответствующими информационными входами блока допускового контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Устройство для автоматического контроля интегральных схем | 1986 |
|
SU1401418A2 |
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 1992 |
|
RU2076466C1 |
| Устройство для контроля усилия срабатывания переключателей | 1983 |
|
SU1111136A1 |
| Устройство для контроля сопротивления изоляции проводников | 1985 |
|
SU1291903A1 |
| Устройство для контроля растворов и провалов контактов электрических аппаратов | 1982 |
|
SU1120289A1 |
| Устройство для контроля работы прессового оборудования | 1980 |
|
SU905837A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Устройство автоматизированного контроля | 1987 |
|
SU1525680A2 |
Устройство содержит: 1 электромагнитный преобразователь (1), установленный на штоке (4), который воздействует на пружину (5), закрепленную в опоре (6). Другой конец штока (4) связан с постоянным магнитом (7) датчика 8 скорости штока, 1 регулятор скорости (12), 1 усилитель тока (15), 1 задатчик скорости (22), блок смешения уровня (28), 1 пусковой триггер (21), 1 блок допускового контроля (20), 1 детектор (30) положительного, сигнала, 1 элемент И (31), 1 элемент задержки (33), 1 инвертор, 1 счетчик (33), 1 компаратор (38) максимальных кодов. 1 компаратор (40) минимальных кодов, 1 дешифратор (41), кода предельного усилия. 8-12-13-1, 1-15-28-29-41-21-22-12, 1-15- 28-30-31-32-33, 33-38-20-32-40-20, 21- 35-31-20. Зил.
16
| Авторское свидетельство СССР № 1403763, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
