1 1зобретение относится к гориодо™ Сбывающей технике и может быть использовано при управлении зкскава- торами, проходческими комбайнами и роботами-манипуляторами.
1Дель и.зобретения повьшение быстродействия системы позиционного управления.
На фиг. I изображена функциональная схема предлагаемой системы позиционного управления; на фиг. 2 - принципиальная схема одного из возможных париантов выполнения первого регулирующего блока; на фиг, 3 - принципиальная схема одного из возможных вариантов выполнения блока сравнения.
Система позиционного управления со- содерлсит задатчик 1 , первое регулирующее устройство 2, цифроаналоговый преобразователь 3, первый усилитель 4, от раничитель 5., второе регулирующее устройство б, тормоз 7, объект 8 управления, исполнительный механизм 9, датчик 10 скорости, датчик 11 положения, устройство 12 установки на- мального состояпия, устройство 13 ввода информации о начальном положении об ьекта, устройство 14 пуска системы, компаратор 15, элемент ИЛИ б, элемент НЕ 17, элементы И 18- 20, форшфователи 21-23, триггер 24, реле 25., второй усилитель 26, сумматоры 27-30, регистры 31-34, преобразователь 35 кода, блоки 36 и 37 сравнения, реверсивный счетчик 38, блоки 39-42 элементов И, блок 43 элементов задержки, генератор 44 импульсов, элементы И 45-49, элемент НЕ 50, элементы 51 и ,52 задержки, элементы И 53 п 54, , 55,бО,..., 55
10
15
20
25
1 3 - - Г1 1
60,;, , 61, 62, элементы ИЛИ 63, 64, 65,, 66, 64.,, 65, 663,...,64., 65,,., , 6.6, . и; , V - сигна- лы на информационном, первом и втором управляющих выходах первого регу- лирую1цего устройства, U,| - выходной сигнал блока, Р - выходно й сигнал блоков 36 и 37 сравнения, а , а
),
ь
а - прямые и инверс
пые двоичные сиг налы соответствующих разрядов на первом.входе блока 36 () сравнения, Ъ|, Ъ,, Ъ,, Ъ
Ъ.
Ъ,
п
г прямые и инверсные двоичные сигналы соответствующих разрядов на втором входе блока 36 (гши 37) сравнения.
Задатчик 1 может быть любым, но .в сочетании с первым регулирующим
12478322
устройством 2 (фиг. 2) целесообразно использовать цифровой задатчик I, выполненный в виде последовательного соединения группы многопозиционных 5 переключателей и шифратора с выходом, например, в прямом или дополнительном двоичном коде в зависимости от знака задаваемой координаты.
Первое регулирующее устройство 2 предназначено для формирования регулирующего воздействия по положению. Б его состав входят цифроаналоговый преобразователь 3, сумматоры 27-30, регистры 31-34, преобразователь 35 кода, блоки 36 и 37 сравнения, реверсивный счетчик 38, блоки 39-42 элементов И, блок 43 элементов задержки, генератор 44 импульсов, элементы И 45-49, элемент НЕ 50 и элементы 5.1 и 52 задержки (фиг. 2).
Цифроаналоговый преобразователь 3 может быть выполнен, например, в виде преобразователя прямого ши1 дополни- тельпого двоичного кода в электрическое напряжение.
Первый усилитель 4 служит для масштабирования информационного выходного сигнала первого регулирующего блока 2. В качестве него может быть применен операционный усилитель, а в простейшем случае этот усилитель может быть заменен даже потенциометром.
Второе регулирующее устройство функщюнально является регулирующим устройством скорости. Оно может быть выполнено как в аналоговом, так и -в цифровом виде и в нем может быть реализован любой закон регулирования, например, ПИ-закон регулирования.
Тормоз 7 может представлять собой, например, грузовой или пружинный тормоз с электромагнитным механизмом растормаживания.
Объект 8 управления представляет собой рабочий орган экскаватора или проходческого комбайна, т.е. нагруз- ку, соединенную с валом иснолнитель- ного механизма 9.
ИсполнительньШ механизм 9 представляет собой двигатель и редуктор.
В качестве датчика10 скорости может быть применен тахотенератор.
В качестве датчика 11 положения принципиально может быть применен любой датчик положения. Однако, приведенное на фиг, 2 частное выполнение первого регулирзшщего устройства 2
30
35
40
45
а
50
55
требует применения цифрового датчика положения, вьтолненного, например, в виде преобразователя линейного или углового перемещения в прямой или дополнительный двоичный код в зави- симости от знака контролируемой координаты ,
В качестве устройства 12 установки начального состояния, устройства 13 ввода информации о начальном положе- НИИ объекта и устройства 14 пуска системы могут быть примене1Ш источники постоянного сигнала, соединенные с переключателями ручного управления
без фиксации.
Г
В качестве формирователей 21-23 импульсов могут быть использованы, например, ждущие мультивибраторы, причем первый и второй формирователи импульсов 22 и 23 должны быть выполнены, как формирователи импульсов разной полярности - соответственно отрицательной и положительной.
О Ъ ( ,)(азЪзУ(а .j b)... (V,H-/(V,n-..-,bMb.,bJ...))v
vb, ((,jb.,)(a3b3V()... (a,,b.,v(a,b,va.,b ...)),
где a, a, a, a,.
.M :
мые и инверсные двоичные сигналы соответствующих разрядов кода на первом входе блока 36 (или 37) сравне- ПИЯ, подключаемом к выходу соответственно первого 27 или второго 28 сумматора (без знакового разряда);
ь, , ь.
2
Ч - прямые и инверсные двоичные сигналы со- ответствующих разрядов кода на втором входе блока 36 (или 37) сравнения, подключаемом к выходу третьего регистра 33 (Ь , Ъ. - сигналы на входе знакового разряда);
3 - сигнал, возникающий на выходе блока 36 (или 37) сравнения кодов, если код на его первом входе по модулю больще кода на его втором входе (сравниваемые коды имеют одинаковые знаки);
п - число разрядов срав шваемых кодов.
Принципиальная схема блока 36 (или 37).сравнения, реализующего Бьше указанную логическую функцию, представлена на фиг. 3, где обозначены: элементы И 53 и 54, 55;j-60i,
В качестве триггера 24 может быть использован, например, триггер с раздельными входами.
В качестве усилителя 26 может быть использован, например, аналоговый усилитель сигналов постоянного тока, вьшолняющий функции усилителя мощности.
В качестве сумматоров 27-30 могут быть использованы например, комбинационные двоичные сумматоры с пара- .фазными входами и выходами.
В качестве рагистров 31-34 могут быть использованы, например, регист- ры с парафазными входами и выходами.
Преобразователь 35 кода может быть выполнен, например, в виде комбинационного преобразователя входного кода в дополнительный код.
Каждый из блоков 36 и 37 сравнения может быть выполнен, например, в виде комбинационного логического элемента, реализующего переключательную функцию
(I)
354045
50
55
,... 55,-60., и 61 и 62; элементы ИЛИ 63, 64 -66 , 64 -66 ,..., и 64,,,-66,., ..
В качестве реверсивного счетчика 38 может быть использован, например, реверсивный счетчик с парафазным выходом.
Система позиционного управления работает следующим образом.
С помощью устройства 12 установки начального состояния, сблокированного с кнопкой включения питания, включают питание системы (не показаны). При этом триггер 24 устанавливается в нулевое состояние и начинает работать генератор 44 импульсов. Однако процессы, возни| :ающие при этом в первом регулирующем устройстве 2, до срабатывания устройства 14 пуска системы не оказьшают никакого влияния иа функционирование системы.
Затем с помощью задатчика 1 в первое регулирующее устройство 2 вводят заданное положение Х объекта 8 управления, а с помощью устройства 13 ввода информации о начальном положении объекта - начальное значение X.,
его действительного положения, допол- ннтельпый код которого поступает в первый регистр 31. При этом па выходе первого сумматора 27 образуется код пачального значения оставшегося пути Зо,„ равного S,:,, Х.- Х„,. а па выходе второго сумматора 28 - код пачального значения пройденного пути So, равного So Х Х О,
второго усилителя 26 исполнительны механизм 9 развил пусковой момент, .несколько превышающий номепт сопро тивления объекта 8 управления, в т чение времени, несколько превышающ го время изменения положения.X объ та 8 управления, на величину, соот ветствующую единице младшего разря да цифрового датчика I положения
т.е.-код нуля. Каково бы ни было при Ю (при выбранном пусковом моменте).
этом состояние третьего регистра 33 (п, следовательно, каков бы ни бьш код на его выходе), выход блока 37 сравнения не возбуждается. В связи с этим очередной импульс генератора 44 импульсов проходит через элемент И kl II по истечении времени задержки элемента 52 устанавливает регистры 32 и 33 и реверсивный счетчик 38 п пулевые состояппя. Далее, вплоть до гюыепта пуска системы, саждьп 1 им- 1гульс генератора 44 иппульсов выводит из реверсивного счетчгша 38 в регистр 34 код нуля и но истечении времени задержки элемента 52 подтверходает .установку регистров 32 и 33 и рев-зр- cnBHoi o счетчика 38 в пулевые состояния,
Затем с помощью устройства 14 пус-
ка спстемы осуществляется пуск систе-30 циклов.должно быть больше максималь- Mi,-i, Если заданная координата X , не . ло возмо.жной частоты изменения кода paiiita начальному значению Х,, действи- . действительного положения X, что мо- тел.ьной коо.рдинаты X рабочего меха- жет быть обеспечено..выбором достаточ- ннзма 8, то под воздействием устройст- но высокой частоты.генератора 44 имва 14 пуска системы формирователь 21 35. импульсов формирует импульс устапов-: ки едпни. да триггера 24. Б результате, отого включается реле 25 и. подается силовое питание на тормоз 7 и на
Ш
исполнительный механизм 9. Одновременно в зависимости от знака начального значенргя оставшегося пути .о
пульсов.
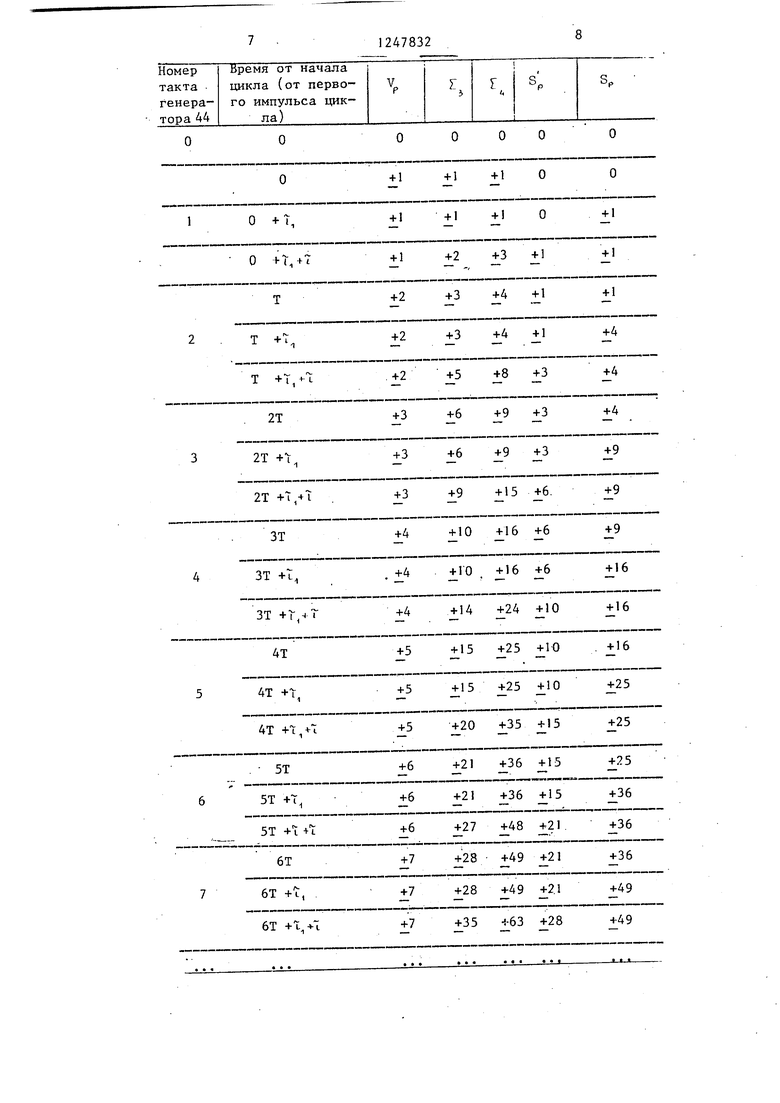
В каждом цикле работы нервого регулирующего устройства 2 происходит накопление импульсов в реверсивном счетчике 38 и соответству1оп;ее изменение содержимого регистров 32 и 33, Изменение содержимого У реверсивного счетчика 38, величин п X . иа
X.
нл ос;тавше1 ося пути Oai-iо ---- ...... -, - . .. . ,-„
формирователь 22 (или 23) выходах сумматоров 29 и 3j, содержимого SP второго регистра 32 и содер- 45 жимого SP регистра 33 юшюстрируется таблицей,
импульсов формирует соответственно отрицательный (или полошп сльный) пусковой импульс, поступающий на пер-, вып (шш второй) вкод второго ус1ши- теля 26. Параметры пусковых иг-1пульсов (ам1шитуда и длительность) должны быть подобраны таким образом, чтобы - при подаче пускового импульса на вход
45
второго усилителя 26 исполнительный механизм 9 развил пусковой момент, .несколько превышающий номепт сопротивления объекта 8 управления, в течение времени, несколько превышающего время изменения положения.X объеь та 8 управления, на величину, соответствующую единице младшего разряда цифрового датчика I положения
Б результате действия пускового импульса объект 8 управления начинает движение и его действительное положение X становится отличным от его начального значения ) , не менее чем .на единицу младшего разряда датчика 11 положения, а пройденный нуть S X Хд становится-отличным от нуля на ту лее единицу. Соответственно уменьшается оставшийся нуть, ко- торьм становится равньп- При S ..0 и 8„„ О, т.е. (S1 0 н /8„ст 0 иервое peryjnipyimuee устройство 2 работает циклически с переменной частотой повторения циклов, зависящей от частоты.генератора 44 импульсов и от величин пройденного ну- пути S и оставшегося пути 3.. Наименьшее значение частоты повторения
пульсов.
В каждом цикле работы нервого регулирующего устройства 2 происходит накопление импульсов в реверсивном счетчике 38 и соответству1оп;ее изменение содержимого регистров 32 и 33, Изменение содержимого У реверсивного счетчика 38, величин п X . иа
---- ...... -, - . .. . ,-„
выходах сумматоров 29 и 3j, содерживыходах сумматоров 29 и 3j, содержи
мого SP второго регистра 32 и содер- жимого SP регистра 33 юшюстрируется таблицей,
где i . период генератора 44 тгаульсов;
ь - время задержки элемента 51; задержгси блока 43 элементов задержки.
000
912Л
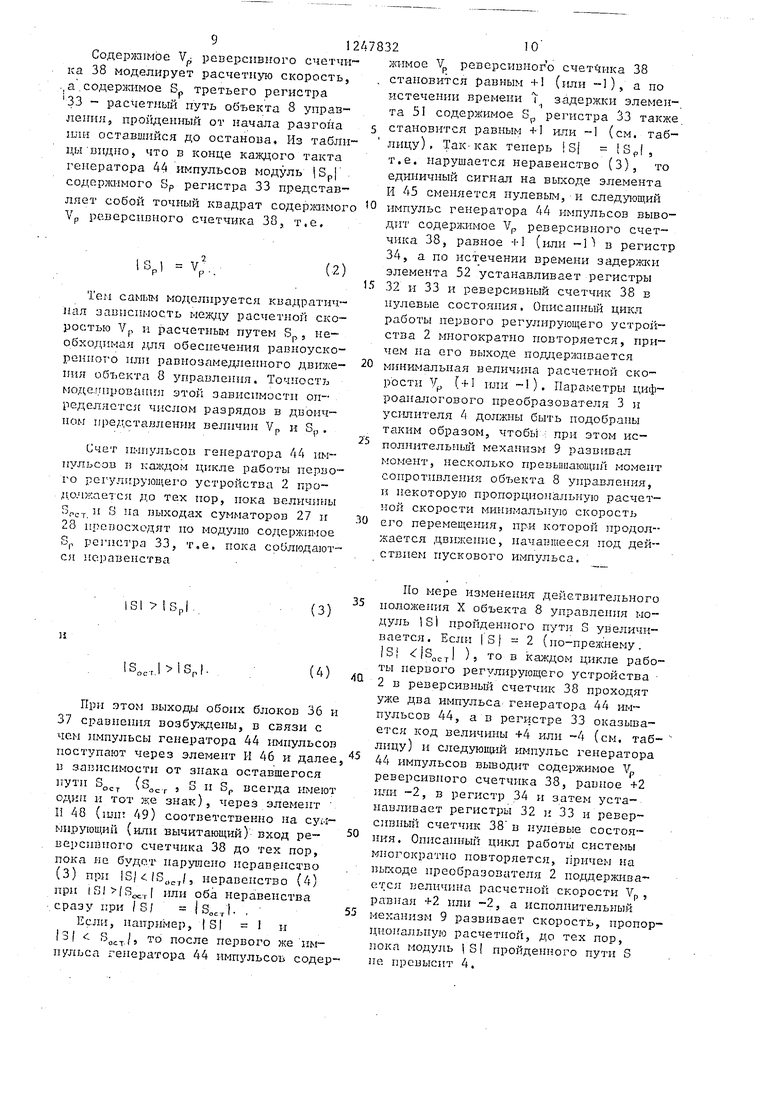
Содердашое V реверсивного счетчика 38 моделирует расчетную скорость, ., а . содержимое Sp третьего регистра 33 - расчетный путь объекта 8 управления, проеденный от начала разгона imii оставшийся до останова. Из таблицы видно, что в конце кавдого такта генератора 44 импульсов модуль |Sp| . содерлшмого Sp регистра 33 нредстав- ллет собой точный квадрат содерж1 1ого VP реверсивного счетчика 38, т.е.
V,
(2)
Тем самым моделируется квадратич нал зависимость между расчетной скоростью VP и расчетным путем S, необходимая для обеспечения равноускоренного или равнозамедленного движения объекта 8 управления. Точность иоделировгипш этой зависимости определяется числом разрядов в двоичном представлении величин Vp и Sp.
Счет импульсов генератора 44 импульсов в каждом цикле работы перво го регулирующег о устройства 2 про- до. окает ся до тех пор, нока велнчиьгы
. ст.
и S на выходах сумматоров 27 и
28 превосходят но модулю содержга-юе S|, регистра 33, т.е. пока соблюдаются 5 еравенства
iSl
(3)
II
13„
1SJ.
(4)
При этом выходы обоих блоков 36 и 37 сравнения возбуждены, в связи с чем импульсы генератора 44 импульсов постз/пают через элемент И 46 и далее в зависимости от знака оставшегося пути 3 (8„. , Б и SP всегда имеют один и тот же знак), через элемент И 48 (шнт 49) соответственно на суммирующий (или вычитающий) вход ре- версивиого счетчика 38 до тех пор, пока не будет napyiaeno неравенство (З) при lS/(, неравенство (4) при .|. ( или оба неравенства сразу при / S/ ./|. ,
Если, например, |8| 1 и |3( , то после первого же им- нульса генератора 44 импульсов содер2 О
пгмое VP реверсивног о 38 становится равным +1 (или -1), а но истечении времени Т задержки элемен-. та 5 содержимое Sp регистра 33 также.
становится равным н-1 или -1 (см. таблицу), Так-как теперь 8| 8р(, т.е. нарушается неравенс.тво (3), то единичный сигнал на выходе элемента И 45 сменяется нулевым, и след пощий
импульс генератора 44 имщшьсов выводит содержимое Vp реверсивного счетчика 38, равное -i-l (или -П в регистр 34, а по истечении времени задержки элемента 52 устанавливает регистры
32 и 33 и реверсивный счетчик 38 в пулевые состояния. Описапный цикл работы первого регулирующего устройства 2 многократно повторяется, причем на его выходе подгдерживается
минимальная величина расчетной скорости Yjj ( + 1 или -1). Параметры циф- роаналогового преобразователя 3 и усилителя 4 должны быть подобраны таким образом, чтобы : при этом исполнительпьпЗ: механизм 9 развивал
момент, несколько превышающий момент сопротивления объекта 8 управления, и некоторую пропорциональную расчетной скорости минимальную скорость
его перемещения, при которой продолжается двп;кепие, пачавшееся под действием пускового импульса.
По мере изменения действительного ноложения X объекта 8 управления модуль ISl пройденного пути 8 увеличивается. Если I 8 t 2 (по-прелснему. |Sj |8„;,.| ), то в каждом цикле работы первого регулирующего устройства - 2 в реверсивньй счетчик 38 проходят уже два импульса генератора 44 импульсов 44, а в регистре 33 оказывается код величины +4 илн -4 (см. таблицу) и следующий импульс генератора 44 импульсов вьшодит содержимое Vp реверсивного счетчнка 38, равное +2 или -2, в регистр 34 и затем устанавливает регистры 32 и 33 и реверсивный счетчик 38 в нулевые состояния. Описанный цикл работы системы многократно повторяется, прпчем на вькоде преобразователя 2 поддерживается величина расчетной скорости Vp, равная +2 или -2, а исполнительный механизм 9 развивает скорость, нронор- цио1гальпую расчетной, до тех пор, пока модуль |8 пройденного пути S пе превысит 4.
Если S 5 (и по-прежнему |S I ), TO в каждой цикле работы первого регулир тощего устройства 2 в реверсивный счетчик 38 проходят три импульса генератора 44 импульсов, а в регистре 33 оказывается код величины +9 или -9.(см. таблицу) и следующий импульс 44 генератора импульсов выводит содерж1-1мое Vp ре- версивного счетчика 38, равное +3 или -3, в регистр 34 и затем устанавливает регистры 32 и 33 и реверсивный счетчик 38 в нулевые состояния. Описанный цикл работы системы многократно повторяется, причем на выходе первого регулирующего устройства 2 поддерживается величина расчетной скорбстп VP, равная +3 или -3, а исполнительный механизм 9 развивает скорость, пропорциональпую расчетной до тех пор, пока модуль |S| пройденного пути пе превысит 9.
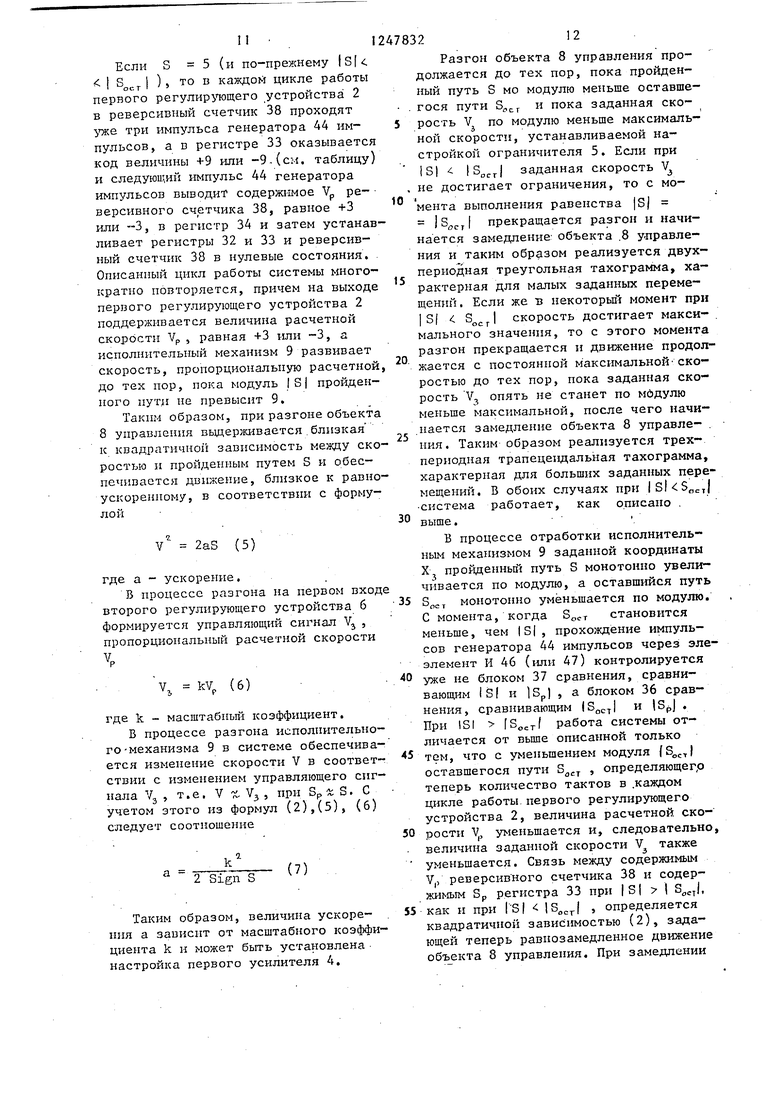
Таким образом, при разгоне объекта 8 управления выдерживается,близкая к квадратично зависимость между скоростью и пройденным путем S и обеспечивается движение, близкое к равноускоренному, в соответствии с формулой
V 2аБ (5)
где а - ускорение.
В процессе разгона на первом входе второго регулирующего устройства б формируется управляющий сигнал Vj , пропорциональный расчетной скорости У„
V, kV,
(6)
где k - масштабпьш коэффициент.
В процессе разгона исполнительного -механизма 9 в системе обеспечива- ется изменение скорости V в соответствии с изменением управляющего сиг, С (6)
нала
УЗ , т.е. V ТС- УЗ , при SP С S
учетом этого из формул (2),(5), следует соотношение
а
2 Sign S
(7)
Таким образом, величина ускоре- . ПИЯ а зависит от масштабного коэффициента k и может бьп-ь установлена настройка первого усилителя 4,
5
0.
5
0
Разгон объекта 8 управления продолжается до тех пор, пока пройденный путь S МО модулю меньше оставше. гося пути и пока заданная скорость Vj по модулю меньше максимальной скорости, устанавливаемой настройкой ограничителя 5. Если при |S| заданная скорость V
, не достигает ограничения, то с момента выполнения равенства |S) jS(.j| прекращается разгон и начинается замедление: объекта .8 управления и таким образом реализуется двух- периодная треугольная тахограмма, характерная для малых заданных перемещений . Если же в некоторый момент при I S( скорость достигает максимального значения, то с этого момента разгон прекращается и движение продолжается с постоянной максимальной скоростью до тех пор, пока заданная скорость Vj опять не станет по модулю меньше максимальной, после чего начинается замедление объекта 8 управле- . ПИЯ. Таким образом реализуется трех- периодная трапеце1здальная тахограмма, характерная для больших заданных перемещений, В обоих случаях при .,|
система работает, как описано , выше. ,
В процессе отработки исполнительным механизмом 9 заданной координаты X пройденньш путь S монотонно увеличивается по модулю, а оставшийся путь
35 5„
е
С момента, когда становится меньше, чем IS|, прохождение импульсов генератора 44 импульсов через эле- элемент И 46 (или 47) контролируется
40 уже не блоком 37 сравнения, сравнивающим IS( и ISp) , а блоком 36 сравнения, сравнивающим 13ост1 и |SpJ . При ISI работа системы отличается от вьше описанной только
тем, что с уменьшением модуля
оставшегося пути S. , определяющего теперь количество тактов в .каждом цикле работы.первого регулирующего
устройства 2, величина расчетной ско50 рости VP уменьшается и, следовательно,
величина заданной скорости V также уменьшается. Связь между содержимым V|, реверсивного счетчика 38 и содержимым SP регистра 33 при |S| I S,|,
$5 как и при I Sl , определяется квадратичной зависимостью (2), задающей теперь равпозамедленное движение объекта 8 управления. При замедлении
13
объекта 8 управления вьщерживается близкая к квадратичной зависимость между скоростью V .и оставшимся путем В„ и обеспечивается движение, близкое к равнозамедленному, ВИИ с формулой
у - -2 a,S,,,,(8)
в соответст- 5
12478
а - замедление.
В процессе замедления, как и при разгоне, управляющий сигнал V на первом входе второго регухшрующего устройства б пропорционален расчетной скорости VP и определяется соотношением (б). При замедлении система обесггечпвает изменение скорости V в соответствии с изменением управляюще го сигнала V,, т.е. V V F у S
-TV
(2).
,5 1 V ij при
с учетом этого из формул (6), (8) следует соотношение
а - :
k2 Sign 3„
(9)
аналогичное (7),
Замедление объекта 8 управления продолжается до тех пор, пока ( So,-J 0. Прн ,| О в каждом цикле работы первого регулирующего устройства 2 на его выходе формируется величина расчетной скорости Vp , равная нулю, а на нервом входе второго регулирующего устройства 6 - управля- юдщй сигнал V , равный нулю. Одновременно .на выходе компаратора 15 формируется сигнал, устанавливающий триггер V в нулевое состояние. Вследствие этого отключается силовое питание тормоза 7 и исполнительного механизма 9, объект 8 управления останавливается с наложением тормоза. На этом заканчивается отработка заданной координаты Xj.
Для отработки нового значения заданной координаты X, необходимо ввести в систему новое значение X н
новое значение Х действительной кО ординаты объекта 8 управленияj а за тем осуществить пуск системы. При последовательной отработке ряда значений Х, ввод новых значений X и фиксация значений Х„ могут производиться не только вручную, но и автоматически, следовательно система позиционного управления может быть использована в составе слозкной уста- 1:овки автоматического или. автоматизи
5
to
15
20
30 552478321
рованного управления одним или , Mrto- гими механизмами.
Предлагаемая система позиционно-. го управления обладает (по сравнении с известными) следующими преимуществами.
Устройство 12 установки начального состояния, элемент ИЛИ 16 и триггер 24 обеспечивают приведение системы в исходное состояние при ее включении.
Устройство 13 ввода информации о начальном положении объекта обеспе- чивает возможность контроля пройденного пути.
Устройство 14 пуска системы, элементы И J8-20, формирователи 21-23 импульсов и реле 25 совместпо с триггером 24 и вторым усилителем 26 обеспечивают при пуске системы подачу на вход исполнительного механизма 9 пускового импульса требуемой полярности, амплитуды и длительности одновременно с подачей силового питания на исполнительный механизм 9 и снятия тормо- за 7.
Ко1 таратор 15 совместно с элементом I-ffll I 16 и триггером 24 обеспечивает приведение системы в исходное состояние, отключение сютового питания исполнительного механизма 9 и наложение тормоза 7 после отработки за данной координаты Х объектом 8 управления,
35 Элемент НЕ 17 обеспечивает блокировку пуска системы при Х X.
В первом регулирующем устройству 2 сумматоры 27 и 28, nepBbni регистр 31, преобразователь 35 кода и блок 39 элементов И обеспечивают вычисление пройденного пути S и оставшегося пути . и выдачу сигналов на его управляющие выходы, сумматоры 29 и 30, регистры 32 и 33, реверсивный счет- .чик 38, блоки 40 и 41 элементов И, блок 43 элементов задержки, генератор 44 импульсов, элементы И.46, 48 и 49 и элемент 5 задержки обеспечивают
25
30
вычисление расчетной скорости Vp и соответствующего ей расчетного пути SP как из УСЛОВИЯ равнозамедленного движения при замедлении привода, так и дз условия равноускоренного движения при разгоне привода.
Блоки 36 и 37 сравнепия и элемент И 45 обеспечивают сравнение расчетного пути SP как с путем 3„ , оставшимся до останова объекта 8 управле
15
ПИЯ, так и с путем S, пройденным от момента пуска исполнительного механма 9, и выбор меньшего из пих по модулю .
Регистр 34, блок 42 элементов И, элемент И 47, элемент НЕ 50 и элеме 52 задержки совместно с генератором 44 импульсов обеспечивают вьтод на информацио1П1ый выход второго регули ру ощего блока 2 величины расчетной скорости VP, соответствующей меньшему по модулю S (или 8д ), пройденнму от. момента пуска привода или оставшемуся до останова рабочего механизма.
Вышеперечисленные преимущества предлагаемой cиcтe I позиционного уравления (по сравнению с известными обеспечивают повышение быстродейств системы за счет приближения процесс разгона исполнительного механизма к равноускоренному движению и реализации тахограммы движения объекта уп-
равления, близкой к оптимальной по быстродействию (треугольной или трапецеидальной)- тахограмме.
Формула изобретения
1, Система позиционного управления, содержащая последовательно соединенные задатчик, первое .регулирующее устройство, первьй усилитель, ограничитель, второе регулирующее устройство, второй усилитель, исполнительный механизм и объект управления, на котором установлены.датчик положения и датчик скорости, соединенные выходами с вторыми информационными входами соответственно первого и второго регулирующих устройств, отличающаяся т-ем, что, с целью повышения быстродействия си- )l, в ней установлены устройство ввода информации о начальном положении объекта, устройство пуска системы, компаратор, первый и второй элементы И, элемент НЕ и два формирователя импульсов,- причем выход устройства ввода информации о начальном положении объекта соединен с управляющим входом первого регулирующего устройства, выходы задатчика и датчика положения подключены к.соответствующим входам компаратора, соединенного выходом через элемент НЕ с первыми входами первого и второго эле- мептпс И, подключенных вторыми входа16
0
5
НИ к выходу устройства пуска системы третьими входами - соответственно к первому и .второму управляющим выходам первого регулир тощего устройства, а выходами через первый и второй формирователи импульсов соответственно - к второму и третьему входам второго усилителя.
2. Система по п. 1, отличающаяся тем, что первое регулирующее устройство содержит четыре сумматора, четыре регистра, преобразователь кода, два блока сравнения, реверснвньн счетчик, четыре блока
5 элементов И, блок элементов задержки, генератор импульсов, пять элементов И, элемент НЕ, два элемента задержки и цифроаналоговый преобразователь, причем первые входы первого и второ0.ro сумматоров, управляющий вход первого блока элементов И, выход цифро- аналогового преобразователя, единичный и нулевой выходы знакового разряда первого сумматора являются соответственно первым и вторым информационными входами, управляющим входом, информационным, первым и вторым управляющими выходами первого регулирующего устройства, первый вход второго сумматора подключен к входу преобразователя кода, соединенного выходом с вторым входом первого сумматора и с информационным входом первого блока элементов И, подключенного выходом через первый регистр к второму входу второго сумматора, модульные выходы первого и второго сумматоров соединены с первыми входами соответственно первого и второго блоков сравнения, подключенных выходами к первому и второму входам первого элемента И, соединенного выходом с первым входом второго элемента И и через элемент НЕ - с первым входом третьего
5 элемента И, подключенного вторым входом к выходу генератора импульсов и второму входу второго элемента И, соединенного выходом с входом первого элемента задержки и с первыми входами
0 четвертого и пятого элементов И, подключенных вторыми входами соответственно к нулевому и единичному выходам знакового разряда первого сумматора, а в ыходами - к суммирующему и к вы5 читающему входам реверсивного счетчика, соединенного выходом с первым входом третьего сумматора, подключенного выходом к информационному входу второ0
5
0
го блока элементов И и первому входу четвертого сумматора, соединенного выходом с информационным входом третьего ,блока элементов И, подключенного ун- равляющим входом к выходу первого элемента задержки..и управляюЕ1ему входу второго блока элементов И, соединенного выходом через блок элементов задержки с информационным входом второго регистра, подключенного выходом к вторым входам третьего и четвертого сумматоров, а входом установки нуля - к выходу второго элемента задержки, к входам установки нуля реверсивного
счетчика и третьего регистра, соединенного информационным входом с выходом третьей группы элементов И, а выходом - с вторыми входами первого и второго блоков сравнения, выход третьего элемента И соединен с входом второго элемента задержки и с управляющим входом четвертого блока элементов И, подключенного информационным входом к выходу реверсивного датчика, а выходом через четвертый регистр - к , входу цифроаналогового преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство для управления сортировкой штучных изделий | 1982 |
|
SU1375535A1 |
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1224444A1 |
| Способ повышения скорости прокатки на мелкосортном прокатном стане и устройство для его осуществления | 1978 |
|
SU910248A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Устройство для селекции признаков объектов | 1990 |
|
SU1725237A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2515215C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2517322C1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277037A1 |


Изобретение относится к .области автоматизации горнодобывающей техники и может найти преимущественное использование при управлении экскаваторами, проходческими комбайнами и роботами-манипуляторами. Целью изобретения является повьшение быстродействия системы. Сигнал задания поступает на информационный вход цифрового регулирующего блока, который формирует сигнал регулирования по положению. Он масштабируется, ограничивается и поступает на вход второго анапогово- го регулирующего блока, . который формирует сигнал регулирования по скорости. Он усиливается по мощности и через исполнительный механизм воздействует на объект управления. Положение объекта контролируется датчиком положения и датчиком скорости, выходные сигналы которых поступают на вторые входы цифрового и аналогового регулирующих блоков. Кроме того, в цифровой блок вводится информация о начальном положении объекта управления. Сигналы задатчика и датчика положения сравниваются в компараторе, инвертируются и поступают на первые входы элементов И, иа втр- .рые входы которых поступают сигналы с выхода устройства запуска системы, а на третьи - управляющие сигналы цифрового блока. Выходные сигналы элементов И через формирователи импульсов воздействуют на усилитель мощности, обеспечивая оптимальный разгон и торможение. Цифровой регулирующий блок рассчитывает оптимальный режим работы. 1 з.п. ф-лы. 3 ип., 1 табл. W с ю 4; СХ) 00 N9
pi/«. /
и,
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU328424A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| КОМБИНИРОВАННАЯ СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU398922A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
