Исобретение относится к приборостроению и может быть использовано в измерительных блоках .робототехнических комплексов.
Цель изобретения - повышение точности и расширение функциональных возможностей, за счет умножения габаритов.
На фиг. 1 изображен предлагаемый датчик; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - блок линеаризации; на фиг. 4 - блок нелинейных функций.
Датчик содержит профилированную коническую трубку 1 с размещенным в ней шариком 2. Первый конец трубки 1 соединен со стабилизатором 3 расхода сжатого воздуха, вход которого соединен с источником 4 сжатого воздуха. Второй конец трубки 1 соединен с атмосферой, при этом оба конца трубки 1 снабжены ограничителями, предназначенными для исключения выпадения шарика 2 из трубки 1. Для определения положения шарика 2 используется датчик положения 5, выходной канал 6 которого соединен через интегратор 7 с управляющим входом 8 стабилизатора 3, а также через блок линеаризации 9 с регистратором 10.
Датчик положения 5 выполнен в виде последовательно соединенных с источником 4 сжатого воздуха через редуктор давления 11 дросселя 12 и сопла 13 с треугольным профилем отверстия (см, фиг, 2). объем 14 между которыми связан с выходным каналом б, что позволяет использовать общий со стабилизатором 3 источник питания и обеспечить дополнительную стабилизацию шарика 2 струей, обтекающей шаркк в перпендикулярном его движению направлении.
Блок линеаризации 9 выполнен в виде первого квадратора 15, вход которого связан с выходным каналом интегратора 7, а выход - с первым входом 16 первого блока умножения 17, выход которого соединен со входом блока 18 нелинейных функций. Выход блока 18 соединен через первый вход 19 второго блока умножения 20 с регистратором 10. Вторые входы 21 и 22 блокоа 17 и 20 соединены соответственно с выходами первого и второго задатчиков 23 и 24, задающих постоянные коэффициенты.
Блок 18 нелинейных функций выполнен в виде второго квадратора 25, вход которого связан с выходом первого блока умножения 17, а выход - с входами 26 и 27 третьего 28 и четвертого 29 блока умножения. Первый вход 30 четвертого блока умножения 28 также связан с выходом первого блока умножения 17, а второй вход 31 четвертого блока умножения 29 - с выходом третьего блока
умножения 28, который также соединен со вторым входом 32 пятого блока умножения 33. Первый вход 34 пятого блока умножения 33 соединен с третьим задатчиком 35 коэффициента 1 /6, а выход - с первым входом 36 сумматора 37, второй вход 38 сумматора 37 соединен с выходом первого блока умножения 17, а третий вход 39 - с выходом шестого блока умножения 40. Первый вход 41 шестого блока умножения 40 соединен с выходом четвертого блока умножения 29, а второй вход 42 - с четвертым задатчиком 43 коэффициента 3/40. Выход сумматора 37 соединен с первым входом 19 второго блока
умножения 20.
Датчик работает следующим образом. При установке трубки 1 на поверхность 44. угол наклона а которой необходимо измерить, включают питание сжатым воздухом через стабилизатор 3. Шарик 2 занимает при этом некоторое положение в трубке 1, которое определяется датчиком положения 5. При этом, если шарик 2 расположен ниже (выше) некоторого нулевого положения, за счет отработки сигналов в .линии обратной связи увеличивается (уменьшается) величина управляющего сигнала Y на управляющем входе 8 стабилизатора 3, в результате чего увеличивается
(уменьшается) расход сжатого воздуха через трубку 1 до такой величины, пока шарик 2 не займет требуемое нулевое положение. Под нулевым положением шарика в трубке понимается такое положение шарика, при котором датчик положения 5 имеет условно принимаемый за нуль уровень сигнала. Данное положение шарик занимает всегда в конце переходного процесса при измерении угла наклона а (т.е. соответствующего углу а расхода G).
Этот процесс осуществляется путем обработки информации отдатчика 5 при помощи интегратора 7. Так, например, если
шарик 2 располагается ниже нулевого положения, то сигнал от датчика 5 имеет положительный знак (то есть значение большее, чем при положении шарика 2 в нулевом положении), и в результате интегрирования
этого сигнала блоком 7 происходит увеличение управляющего сигнала Y, т.е. увеличение расхода через трубку 1. При расположении шарика 2 выше нулевого положения сигнал Y уменьшается, что приводит к уменьшению расхода. В случае расположения шарика 2 в нулевом noflq Ke- нии Y const (как интеграл от нуля), что соответствует постоянной величине массового расхода G через трубку 1.
Таким образом, по величине этого расхода (и, соответственно, установившемуся значению величины Y) можно судить о значении угла наклонам . Однако для удобства использования угломера величина Y преобразуется блоком линеаризации 9 в величину Yn, которая линейно зависит от а,
Yn Kot a,
где К dL. - коэффициент линейности. Величина Yn выводится на регистратор 10.
Блок линеаризации 9 составлен из стандартных блоков систем промышленной электро- или пневмоавтоматики. Поступивший с выхода интегратора 7 сигнал Y возводится в квадрат (умножением самого значения Y на себя) блоком 15 и после дом- ножения результата (Y2) на коэффициент KG KY от задатчика 23 блоком умножения 17 поступает на вход блока нелинейных функций 18. Блок нелинейных функций 18 реализует функцию Z arcsinZ. После умножения блоком умножения 20 результата выполнения этой операции на значение К задаваемое задатчиком 24, получается значение Yn Kpt arcsln(Kc KY Y2), которое поступает на вход регистратора 10.
Поскольку, блок нелинейных функций имеет на порядок большую величину погрешности, чем блоки умножения, суммирования и задатчики коэффициентов, для повышения точности линейной характеристики при измерении малых углов используется в качестве блока нелинейных функций, схема, приведенная на фиг. 4, составленная из квадратора 25, блоков умножения 28, 29, 33, 40, задатчиков 35 и 43 и сумматора 37.
Для построения данной схемы использовано известное из литературы разложение функции-arcstnZ в ряд.
В этом случае блок нелинейных функций реализует функцию Z Z + Т/6 Z + +3/40 Z5 и работает следующим образом: сигнал Z с выхода блока умножения 17 поступает на в квадратор 25 и блок умножения 28, с выхода которого сигнал Z поступает на вход 32 блока умножения 33 и на вход 31 блока умножения 29, на другой вход 27 которого поступает сигнал Z2 с выхода блока 25. После перемножения блоком 33 величины Z3 на величину 1/6 от задатчика 35 и блоком 40 величины Z на величину 3/40 от задатчика 43 сигналы 1 /6 Z3 и 3/40 Z5 поступают на соответствующие входы 36 и 39 сумматора 37, еще один вход 38 которого соединен с выходом блока умножения 17. После суммирования сумматором 37 этих значений на его выходе получается требуемое значение Zl Z + 1 /6 Z3 + 3/40 Z5. которое поступает на вход 19 блока умножения 20 и преобразуется далее.
В качестве датчика положения 5 шарика 2 в конструкции угломера может исполь- 5 зеваться пневматический датчик, который не требует дополнительных, кроме имеющегося источника 4, источников питания. Так как шарик 2 занимает разное положение в трубке 1, то и величина перекрытия им тре0 угольного отверстия сопла 13 будет различной, за счет чего и величина давления в полости 14, связанной со входом 6 интегратора 7, будет различной (большей при нахождении шарика 2 ниже этого нулевого
5 положения). При такой реализации датчика 5 интегратор 7, а также блок линеаризации 9 могут быть выполнены, например, на базе устройств промышленной пневмоавтоматики, что позволяет отказаться от дорогостоя0 щих элементов электроавтоматики. Кроме того, это позволит располагать все блоки угломера в зонах с повышенным уровнем радиации, а также пожаро- и взрывоопасных зонах, где использование элементов
5 электроавтоматики невозможно.
Формула изобретения
1. Датчик угла наклона, содержащий трубку с установленным в ней с возможностью перемещения шариком, источник и
0 стабилизатор расхода сжатого воздуха, соединенный трубопроводом с первым концом трубки, второй конец которой соединен с атмосферой, и измеритель положения шарика, отличающийся тем, что, с целью
5 повышения точности и расширения функци-. опальных возможностей, он снабжен редуктором, дросселем, интегратором, блоком линеаризации и регистратором, трубка выполнена конической, измеритель положе0 ния шарика - в виде треугольного выреза в трубке, выход источника сжатого воздуха по трубопроводу через редуктор и дроссель соединен с треугольным вырезом трубки и входом интегратора, выход которого соеди5 нен с управляющим входом стабилизатора и через блок линеаризации с входом регистратора.
2. Датчик по п. 1,отличающийся тем, что блок линеаризации выполнен в ви0 де последовательно соединенных первого квадратора, первого блока умножения, блока нелинейных функций и второго блока ум- ножения, а также первого и второго задатчиков, выходы которых соединены с
5 вторыми входами соответственно первого и второго блоков умножения.
3. Датчик по пп. 1 и 2, о т л и ч а ю щ и й- с я тем, что блок нелинейных функций выполнен в виде последовательно соединенных второго квадратора, третьего и пятого блоков умножения и сумматора, а также третьего и четвертого задатчиков, четвертого и шестого блоков умножения, причем выход первого блока умножения соединен с входом второго квадратйра, первым входом третьего блока умножения и вторым входом сумматора, выход второго квадратора соединен с первым входом четвертого блока
умножения, выход третьего блока умножения через второй вход четвертого блока умножения - с первым входом шестого блока умножения, выход четвертого задатчика через второй вход шестого блока умножения соединен с третьим входом сумматора, а выход третьего задатчика - с вторым входом пятого блока умножения.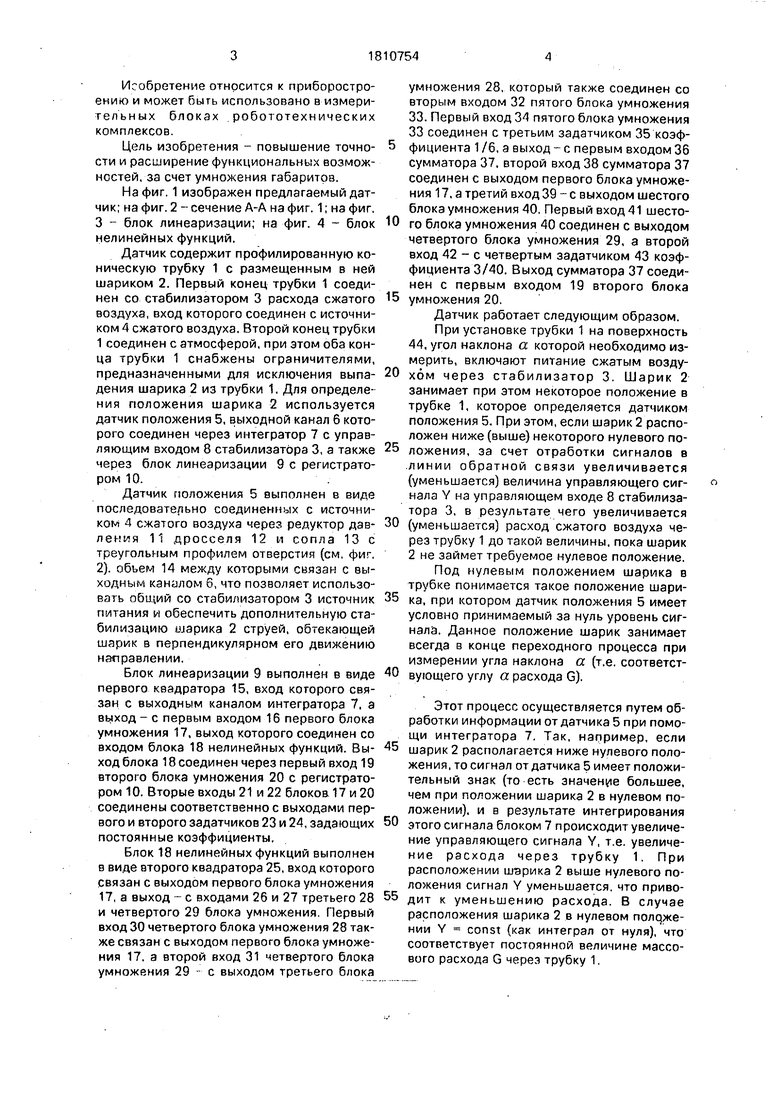

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| Устройство автоматического контроля прогибов роликов машины непрерывного литья заготовок | 1985 |
|
SU1271641A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2524034C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |

Изобретение относится к приборостроению. С целью повышения функциональных возможностей устройство содержит трубку 1 в виде конуса с установленным в ней шариком 2 и измерителем его положения 5. Источник сжатого воздуха 4 через стабилизатор расхода 3 соединен с узким концом трубки и через редуктор давления 11, дроссель 12 - с интегратором 7 и измерителем положения шарика 5, выполненным в виде треугольного выреза в трубке 1. Выход интегратора 7 соединен с управляющим входом стабилизатора расхода сжатого воздуха 3 и через блок линеаризации 9 - с входом регистратора 10. 2 з.п. ф-лы, 4 ил.
К
15
to
±
Фиг.1
13 2 ак&/11 J -arcSLnz
- V-, ш
брФ-г р
Фиг.З
ФигЛ
| Датчик угла наклона | 1975 |
|
SU584181A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения углов наклона | 1985 |
|
SU1318788A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
