Изобретение относится к области автоматического управления технологическими объектами, например, в комбикормовой промышленности.
Целью изобретения является повышение экономичности за счет минимизации затрат электроэнергии. Положительный эффект достигается за счет адаптивного управления нестационарным нелинейным объектом в оптимальном режиме по критерию минимума удельных энергозатрат.
На чертеже показана блок-схема адаптивной системы управления пресс-грануля- тором.
Адаптивная система управления пресс- гранулятором содержит исполнительный механизм 1. объект управления 2, измеритель управляющего воздействия 3, измеритель сигнала состояния объекта 4, блок идентификации параметров объекта 5 (имеющий 3 входа и один выход), блок памяти параметров объекта б (имеющий один вход и три выхода), блок оптимизации управляющего воздействия 7 (имеющий два входа и один выход), блок модели объекта 8 (имеющий два входа, один выход), блок сравнений 9 (имеющий два входа, один выход), нуль-орган 10, блок синхронизации 11 (имеющий один вход, четыре выхода), генератор тестовых сигналов 12, блок формирования сигнала адаптивного управления 13 (имеющий четыре входа и один выход).
Блок формирования сигнала адаптивного управления 13 последовательно соединен с исполнительным механизмом 1, объектом управления 2, измерителем сигнала состояния объекта 4, блоком идентификации параметров объекта 5. Вход измерителя управляющего воздействия 3 подключен к выходу исполнительного механизма 4. Блок памяти параметров объекта 5 последовательно соединен с блоком модели объекта 8, блоком сравнения 9, нуль-органом 10, блоком синхронизации 11, генератором тестовых сигналов 12. Первый и второй входы блока оптимизации управляющего воздействия 7 подключены соответственно ко вторым входам блока памяти параметров объекта 5;и блока синхронизации ft, третьи выходы которых подключены соответственно к первому и второму выходам блока формирования сигнала адаптивного управления 13, к третьему входу которого подкл ючен выход блока оптимизации управляющего воздействия 7, к четвертому входу - выход измерителя сигнала состояния объекта 4 и второй вход блока сравнения 9, а к выходу - выход генератора тестовых сигналов 12. выход измерителя управляющих воздействий 3 подключен к вторым входам блока модели объекта 8 и блока идентификации параметров объекта 5, третий вход которого подключен к четвертому выходу блока синхронизации 11, а выход - к входу блока памяти параметров объекта 6;
Адаптивная система управления пресс- гранулятором работает следующим образом.
0 Исполнительный механизм 1 на основании сигналов, поступающих от блока формирования сигнала адаптивного управления 13 и генератора тестовых сигналов 12, подает рассыпной комбикорм на объект управле5 ния 2 пресс-гранулятора. Измеритель управляющего воздействия 3 преобразовывает физическую величину - количество рас- сыпного комбикорма поступающего в npecc-гранулятор в электрические сигналы.
0 Измеритель сигнала состояния объекта 4 предназначен для преобразования физической величины, характеризующей состояние объекта в электрические сигналы.
Электрические сигналы входа и состоя5 ния объекта управления 2 поступают на блок идентификации параметров объекта 5. Этот блок оценивает параметры объекта управления 2. Значения этих параметров записываются в блок памяти параметров
0 объекта 6,
По параметрам объекта блок оптимизации управляющего воздействия 7 определяет оптимальную уставку для блока формирования сигнала адаптивного управ5 ления 13. На основании уставки и сигнала состояния объекта блок формирования сигнала адаптивного управления 13 осуществляет управление объектом. Параметры блока формирования сигнала адаптивно0 го управления 13 перестраиваются ъ зависимости от параметров объекта управления 2.
Блок модели объекта 8, используя параметры объекта и его входной сигнал, вычис5 ляет сигнал (состояния модели объекта, который сравнивается блоком сравнения 9 с реальным сигналом состояния объекта. Если рассогласования сигналов нет, то выход нуль-органа 10 равен 0 и блок формиро0 вания сигнала адаптивного управления 13 управляет объектом , 2. Если есть рассогласование сигнала состояния объекта и сигнала состояния модели объекта, то нуль-орган 10 выдает сигнал на блок синхронизации 11,
5 который Отключает блок формирования сигнала адаптивного управления 13, подключает генератор тестовых сигналов 12 и блок идентификации параметров объекта 5,
Генератор тестовых сигналов 12 вырабатывает сигнал, необходимый для идентификации параметров объекта. По окончании процесса идентификации блок синхронизатор 11 отключает блок идентификации параметров объекта 5, включает блок оптимизации управляющего воздействия 7 и затем по окончании работы этого блока отключает генератор тестовых сигналов 12, блок оптимизации управляющего воздействия 7 и включает блок формирования сигнала адаптивного управления 13.
По сравнению с прототипом предложенное устройство обладает преимуществом - позволяет адаптивно управлять нестационарным нелинейным объектом в оптимальном режиме. За счет этого экономится электроэнергия и повышается качество готовой продукции.
Изобретение выполняется следующим образом.
Исполнительный механизм 1 реализован при помощи электропривода постоянного тока БУ3609; объектом управления 2 является пресс-гранулятор Б6-ДГВ; измеритель управляющего сигнала 3 реализован при помощи тахогенератора, входящего в комплект электропривода постоянного тока БУ3609; измеритель сигнала состояния объекта 4 реализован при помощи датчика тока - трансформатора ДТТ 200/5.
Оцениваются параметры модели объекта
lk-M alk+bq+cqz,(1)
где 1 - сигнал состояния объекта; . к - дискретный момент времени;
а, Ь, с - оцениваемые параметры;
q - сигнал управляющего воздействия,
Блок синхронизации 11 осуществляет включение и отключение блока идентификации параметров объекта 5.
Работа блока идентификации параметров объекта заканчивается при отключении питания.
У блока памяти параметров объекта 6 входы и выходы отражают смысловую связь - передачу параметров объекта (1) а, Ь, с. Если модель объекта уложится (в зависимости от конкретной реализации), то необходимо будет передавать большее количество параметров, поэтому связи изображены в виде одной стрелки. Блок памяти параметров объекта 6 работает постоянно, Запись информации и считывание осуществляется с временной дискретностью работы АЦП и ЦАП. АЦП сигнал не записывает в случае его отсутствия.
Блок оптимизации управления воздействия позволяет определить такое значение сигнала состояния объекта I, для которого критерий удельных энергозатрат
(f/q)
минимален (см. Долгозвяг В. А. и др. Математическая модель пресс-гранулятора ДГ-1. Известия ВУЗов. Пищевая технология, №4, 1981, с. 55-59), В литературе отмечено, что 5 критерий имеет экстремум. Причем выбор режима работы пресса вблизи точки экстремума приводит к экономии электроэнергии и повышает качество гранулированного комбикорма.
0 Блок 4 алгоритма соответствует блокам 3,4,3,5. Выполняется операция вычисления состояния объекта I в статике
| bg+cq2
Блок алгоритма соответствует блоку 7. 5 Вычисляется критерий l/q. Выполняется сравнение критерия с предыдущим его значением. Если значения критериев равны с допустимой точностью, то экстремум найден. Найденная величина I, соответствую0 щая критерию, записывается в регистр.
Так как количество параметров модели (1) зависит от структуры модели объекта управления, то связь между блоками 6 и 8 изображена одной линией,
5Блок сравнения 9 реализован при помощи сумматора.
Нуль-орган 10 реализован при помощи последовательного соединения выпрямителя и порогового устройства (компаратора),
0Блок синхронизации 11 реализован при помощи командоаппарата КЭП-12 у, Блок синхронизации 11 осуществляет включение и отключение блоков устройства. Отрезок прямой соответствует состоянию блока
5 включено, иначе блок отключен.
Генератор тестовых сигналов 12 реализован при помощи известного устройства - генератора ступенчатого сигнала. Данный блок может быть реализован также при помо0 щи известных устройств. Генератор тестовых сигналов 12 вырабатывает ступенчатый сигнал. Длительность ступенчатого сигнала г выбирается такой, чтобы затух переходной процесс в объекте. Для пресса Б6-ДГВ это
5 около 30 с.
Длительность работы генератора Т определяется по формуле т - Gmax
0 где Gmax - максимальная производительность пресса (по паспорту);
A q - амплитуда ступенчатого сигнала (минимальное изменение производительности по паспорту).
5Блок формирования сигнала адаптивного управления реализует ПИ закон управления. Известно, что ПИ закон регулирования позволяет управлять объектами, модели которых можно представить апериодическим
звеном I или II порядка. Таковым объектом является пресс-гранулятор.
Так как параметры а, Ь, с модели (1) пресса изменяются во времени и при переходе на иной рецепт комбикорма, то в блоке формирования сигнала адаптивного управления 13 производится пересчет коэффициентов регулятора. Перестройка коэффициентов регулятора выполняется по известному алгоритму.. Формула изобретения Адаптивная система управления, содержащая последовательно соединенные блок формирования сигнала адаптивного управления, исполнительный механизм, объект управления, измеритель сигнала состояния объекта, блок идентификации параметров объекта, а также измеритель управляющего воздействия, вход которого подключен к выходу исполнительного механизма, отличающаяся тем. что, с целью повышения экономичности за счет минимизации затрат электроэнергии, дополнительно введены последовательно соединенные
0
5
0
блок памяти параметров объекта, блок модели объекта, блок сравнения, нуль-орган, блок синхронизации, генератор тестовых сигналов, а также блок оптимизации управляющего воздействия, первый и второй входы которого подключены соответственно к вторым выходам блока памяти параметров объекта и блока синхронизации, третьи выходы которых подключены соответственно к первому и второму входам блока формирования сигнала адаптивного управления, к третьему входу которого подключен выход блока оптимизации управляющего воздействия, к четвёртому входу-выход измерителя сигнала состояния объекта и второй вход блока сравнения, а к выходу - выход генератора тестовых сигналов, выход измерителя управляющих воздействий подключен к вторым входам блока модели объекта и блока идентификации параметров объекта, третий вход которого подключен к четвертому выходу блока синхронизации, а выход - к входу блока памяти параметров объекта. .
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ гибридного сканирования радиоэлектронной аппаратуры | 2020 |
|
RU2781091C2 |
| Автоматизированная система контроля работоспособности и диагностики неисправностей радиоэлектронной аппаратуры | 2017 |
|
RU2653330C1 |
| Система адаптивного управления процессом гранулирования комбикормов | 1987 |
|
SU1531956A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2017 |
|
RU2666979C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС КОНТРОЛЯ И ДИАГНОСТИКИ (ВАРИАНТЫ) | 2003 |
|
RU2257604C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ | 2007 |
|
RU2365966C2 |
| Устройство для контроля и диагностирования цифровых узлов | 1989 |
|
SU1755207A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 1997 |
|
RU2137148C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
Использование: для управления технологическими объектами, например, в комбикормовой промышленности. Сущность изобретения: система содержит 1 блок формирования сигнала адаптивного управления (13), 1 исполнительный механизм (1), 1 объект управления (2), 1 измеритель сигнала состояния объекта (4), 1 блок идентификации параметров объекта (5), 1 измеритель управляющего воздействия (3), 1 блок памяти параметров объекта (6), 1 блок модели объекта (8), 1 блок сравнения (9), 1 нуль-орган (10), 1 блок синхронизации (11), 1 генератор тестовых сигналов (12), 1 блок оптимизации управляющего воздействия (7). 1-2-4-5-6-8-9-10-11-7-13-1, 1-3-5, 3-8,-6-7, 6-13,4-9,4-13, 11-12-1, 11-5, 11-13. 1 ил. ел С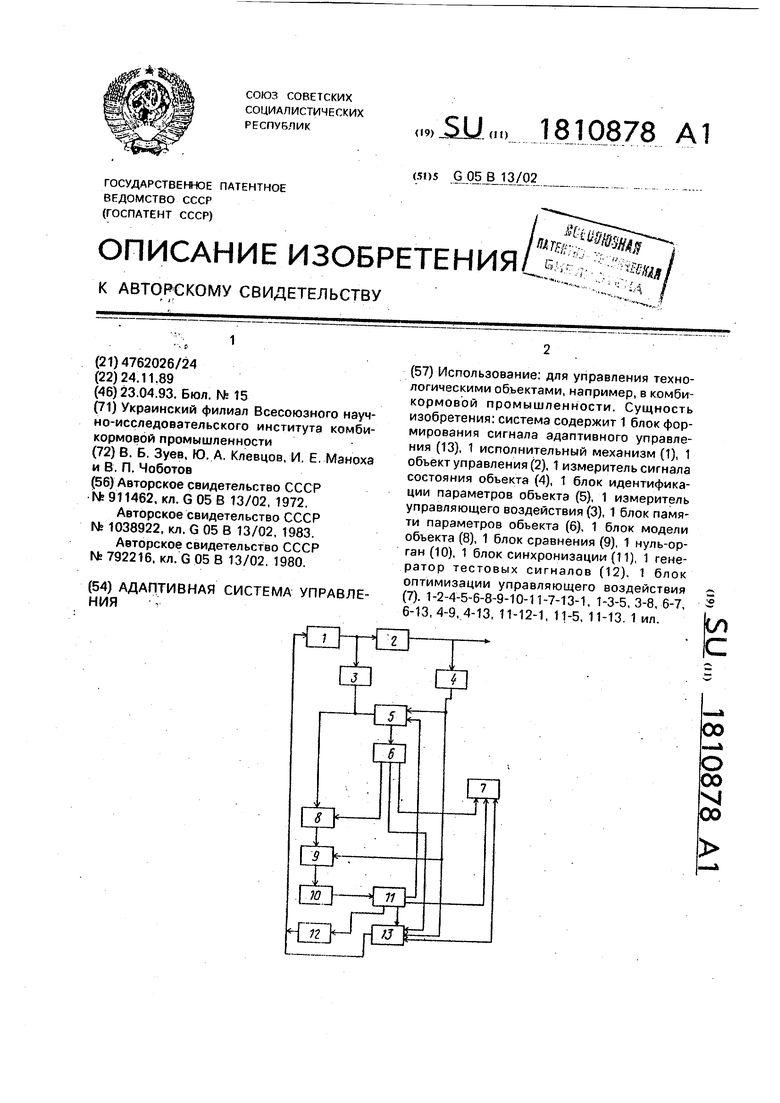
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Идентификатор параметров динамической системы второго порядка | 1981 |
|
SU1038922A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления нестационарным объектом | 1978 |
|
SU792216A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
