(ЗА) АДАПТИВНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| Адаптивный регулятор | 1982 |
|
SU1076873A1 |
| Система адаптивного управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1480878A1 |
| Система автоматического регулирования загрузки мельницы | 1982 |
|
SU1255207A1 |
| Устройство автоматического управления гидроциклоном | 1980 |
|
SU927321A1 |
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Система автоматического управления измельчительным агрегатом | 1982 |
|
SU1052259A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
I
Изобретение относится к аналоговым устройствам автоматики и может быть использовано для управления нестационарными объектами, .например горнообогатительным оборудованием в условиях дрейфа его статических характеристик, вызванного изменением качества перерабатываемого сырья, и износом.
Известен адаптивный регулятор, содержащий пропорционально-инте1 рально-дифференциальный (ПИД) . регулятор с блоком самонастройки коэффициента усиления, реализующий линейный закон управления с перестраиваемым в зависимости от характеристик переходного процесса общим коэффициентом усиления pj.
Недостатком эгого регулятора является то, что в нем имеется только два фиксированных уровня коэффициента усиления, что приводит к неэффективной, низкой точности его адаптации, вследствие чего системы автоматического управления, построенные на базе этих регуляторов, не удовлетворяют требованиям, предъявленным I к качеству переходного процесса.
Наиболее близким к предлагаемому является регулятор, содержащий формирователь управляющего воздействия, последовательно соединенные элемент сравнения, первый блок определения модуля, первый фильтр, первый диф10ференциатор, второй блок определения модуля и амплитудный детектор Zj.
Недостаток известного регулятора малая точность и неудовлетворительное качество переходного процесса.
15
Цель изобретения - повышение точности регулятора и улучшение качества формируемого переходного процесса.
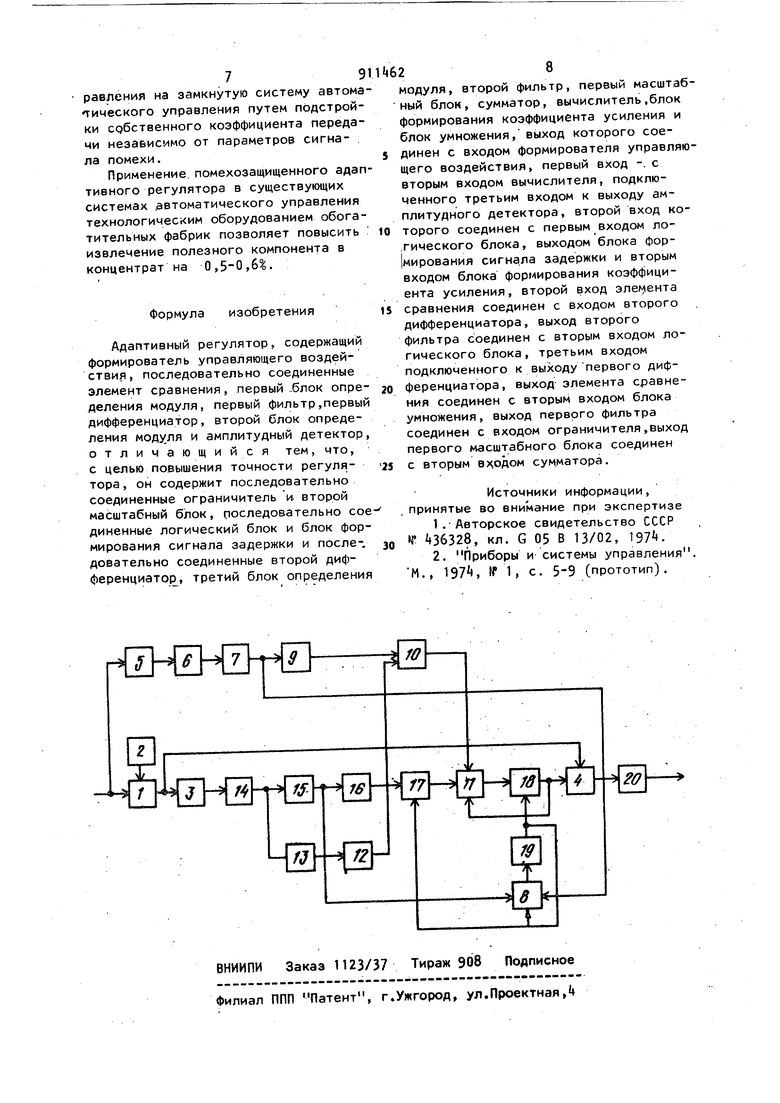
Поставленная цель достигается тем, что регулятор содержитпоследо30вательно соединенные ограничитель и второй масштабный блок, прследовательно соединенные логический блок и блок формирования сигнала задержки и последовательно соединенные второй дифференциатор, третий блок определения модуля, второй фильтр, первый масштабный блок, сумматор, вычислитель, блок формирования koэффициeнтa усиления и блок умножения, выход которого соединен с входом формирователя управляющего воздействия, первый вход с вторым входом вычислителя,подключенного третьим входом к выходу ампли тудного детектора, второй вход котору го соединен с первым входом логического блока, выходом блока формирования сигнала задержки и вторым вхоДОМ блока формирования коэффициента усиления ,второй вход элемента сравнения соединен со входом второго дифференциат(эра, выход второго фильтра соединен со вторым входом логического блока, третьим входом подключенного к выходу первого дифференциатора, выход элемента сравнения соединен со вторым входом блока умножения, выход первого фильтра соединен со входом ограничителя, выход первого масштабного блока соединен со вторым входом сумматора. На чертеже показана блок-схема помехозащищенного адаптивного регулятора . Регулятор содержит элемент 1 срав нения, к первому входу которого подключен задатчик 2, к выходу - вход первого блока 3 определения модуля и первый вход блока t умножения, а второй вход через последовательно соединенные второй дифференциатор 5, третий блок б определения модуля и второй фильтр 7 связан с первым вхо--.-- . - -.дом логического блока В-и входом пер вого масштабного блока 9 подключенного своим выходом к первому входу сумматора 10, выход которого соединен с третьим входом вычислителя 11, а второй вход - через второй масштаб ный блок 12 связан с выходом ограничителя 13, подключенного своим входом к соединенным между собой вых ду первого фильтра 1, вход которого подключен к выходу первого блока 3 определения модуля, и входу первого дифференциатора 15, связанному своим выходом со вторым входом логического блока 8, а через последовательно соединенные второй блок 16 определения модуля и амплитудный детектор 17 со вторым входом вычислителя 11 , выход которого подключен ко второму
входу блока 18 формирования коэффициента усиления, с первым входом которого связан третий вход логического блока 8 и второй вход.амплитудного детектора 17, а через блок 19 формирования сигнала задержки -выход логического блока 8; формирователь
20 управляющего воздействия, ко входу которого подключен выход блока k умножения, второй вход кбторого соединен с выходом элемента Т сравнения, а первый вход связан с выходом блока 18 формирования коэффициента усиления и первым входом вычислителя 11. Регулятор работает следующим образом. Текущее значение выходного сигнала объекта управления х сравнивается на элементе 1 сравнения с сигналом задатчика 2 х-х. В первом блоке 3 определения модуля и первом фильтре 1 выделяется«модуль отфильтрованного сигнала ошибки представляющий собой разность текущего х и заданного х значений выходного сигнала объекта управления. Первый дифференциатор 15 оценивает производную / f модуля сигнала ошибки /6/, а второй блок 16 определения модуля совместно с амплитудным детектором 17 выделяет максимальное значение модуля производной сигнала ошибки у. Как правило, сигнал, характеризующий объект управления, наряду с информацией о состоянии объекта содержит помеху. Для оценки параметров сигнала помехи второй дифференциатор 5, третий блок 6 определения модуля и второй фильтр 7 оценивают модуль усредненного значения производной выходного сигнала объ,ёкта управления. Величина Д со второго фильтра 7, умноженная в первом масштабном блоке 9 на постоянный коэффициент k, складывается в сумматоре 10 с величиной - с первого фильтра I, умноженной на постоянный коэффициент kn во втором масштабном блоке 12. Сумма этих в.еличин, а также значение у поступают в вычислитель 11, который реализует вычисление текущего значения коэффициента передачи адаптивного регулятора (f-f K i -lflKu п -;:-оп, где (Гц - предыдущее значение сГ59Для повышения надежности регулятора .в ограничителе 13 устанавливается диапазон изменения амплитуды сигнала ошибки, которая может быть использована для вычисления сГЛогический блок 8, представляющий собой два последовательно, соединенных триггера, при достижении производной сигнала ошибки . нулевого значения (при условии выхода перед этим значением t за пределы зоны нечувствительности регулятора) за пускает блок 19 формирования сигнала задержки, который через выбранный промежуток времени формирует импульс , которому в блоке 18 формирования коэффициента усиления осуществляется сравнение записанного предыдущего ц и -текущего О-,, значений б, Этот же сигнал осуществляет сброс старого значения {Г в амплитуд ном детекторе 17 и возвращает логический блDk 8 в исходное состояние. Если предыдущее значение сГр и отличается от текущего cT-j., а это возможно в том случае, если не изменились параметры объекта управления (т.е. отношение /у), то ранее записанное и хранимое значение сГ сохраняется, присутствует на выходе блока 18 формирования коэффициента усиления и возвращается в вычислитель 11 . На это же значение в блоке Ц умножения умножается сигнал ошибки б. Измерение значения модуля сигнала ошибки / / через определенный промежуток времени после достижения про изводной С сигнала ошибки f нуле вого -значения, (при условии выхода . перед этим значения за пределы зоны нечувствительности) означает измерение величины /ё/ через некото рое время после достижения сигналом ошибки своего максимального для теку щего переходного режима значения. В случае затухающего переходного процесса это позволяет оценить скорость затухания, а следовательно, быстродействие объекта управления. При уменьшении коэффициента передачи объекта уменьшается его быстро. действие, увеличивается отношение , а следовательно, увеличивается коэффициент передачи регулятора о, формируемый в блоке 18 формирования коэффициента усиления. И наоборот, при увеличении коэффициента передачи 26 объекта растет его быстродействие, уменьшается отношение и, следовательно, уменьшается УВ случае расходящегося переходного процесса на выходе блока 18 формирования коэффициента усиления устанавливается минимальное знамение коэффициента передачи регулятора, что позволяет повысить степень устойчивости замкнутой системы управления. Для компенсации влияния помехи в . выхбдном сигнале объекта управления на формируемый коэффициент передачи регулятора в вычислитель выражения (1) вводится величина Д, характеризующая уровень сигнала помехи.При появлении высокочастотной помехи увеличивается величина у, т.е. знаменатель выражения (1). Однако одновременное увеличение слагаемого в числителе этого выражения компенсирует влияние помехи на вычислительное значение аЛогический, блок .8 осуществляет запуск блока 19 формирования сигнала задержки после достижения 6 определенного выбранного уровня, т.е. выхода значения за пределы зоны нечувствительности логического блока 8. При значительных величинах амплитуды сигнала помехи, возможны ложные срабатывания логического блока 8, что приводит к установке нёоправданного значения , т.е. значению коэффициента передачи регулятора, не соответствующего параметрам объекта управления. Для устранения возможности возникновения подобной ситуации осуществляется коррекция зоны нечувствительности регулятора (логического блока 8) в соответствии с уровнем сигнала помехи, для иего величина Л с выхода второго фильтра 7 подается на первый вход логического блока 8 (на одно из плеч триггера, на второе плечо которого второй вход логического блока 8, поступает величина 6). С блока Ц умножения произведение S поступает на формирователь 20. управляющего воздействия, представляющий собой стандартный ПИД-регу 1Ятор, который формирует выходной сигнал адаптивного регулятор с уметом параметров объекта управления. i Таким образом, помехозащищенный адаптивный регулятор парирует влияние изменения параметров объекта упраеления на замкнутую систему автома тического управления путем подстройки собственного коэффициента передачи независимо от параметров сигнала помехи. Применение, помехозащищенного адап тивного регулятора в существующих системах автоматического управления технологическим оборудованием обогатительных фабрик позволяет повысить извлечение полезного компонента в концентрат на 0,5-0,6%. Формула изобретения Адаптивный регулятор, содержащий формирователь управляющего воздействия, последовательно соединенные элемент сравнения, первый ..блок определения модуля, первый фильтр,первый дифференциатор, второй блок определения модуля и амплитудный детектор, отличающийся тем, что, с целью повышения точности регулятора , он содержит последовательно соединенные ограничитель и. второй масштабный блок, последовательно сое диненные логический блок и блок формирования сигнала задержки и после-, довательно соединенные второй дифференциатор, третий блок определения модуля, второй фильтр, первый масштабный блок, сумматор, вычислитель.блок формирования коэффициента усиления и блок умножения, выход которого соединен с входом формирователя управляющего воздействия, первый вход -. с вторым входом вычислителя, подключенного третьим входом к выходу амплитудного детектора, второй вход которого соединен с первым входом логического блока, выходом блока формирования сигна.ла задержки и вторым входом блока формирования коэффициента усиления, второй вход сравнения соединен с входом второго дифференциатора, выход второго фильтра соединен с вторым входом логического блока, третьим входом подключенного к выходу первого дифференциатора, выход элемента сравнения соединен с вторым входом блока умножения, выход первого фильтра соединен с входом ограничителя,выход первого масштабного блока соединен с вторым в)одом сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР tSGSZe, кл. G 05 В 13/02, 197. 2. Приборы и системы управления. М., IS, tP 1, с. 5-9 (прототип).
