Изобретение относится к локационным системам и может быть использовано для дистанционного измерения параметров атмосферы с помощью лидаров, а также для экспресс-контроля за. текущими и суммарными показателями в газовых выбросах промышленных предприятий.
Цель изобретения - повышение точности и сокращение времени определения параметров пространственного распределения концентраций аэрозолей в выбросе.
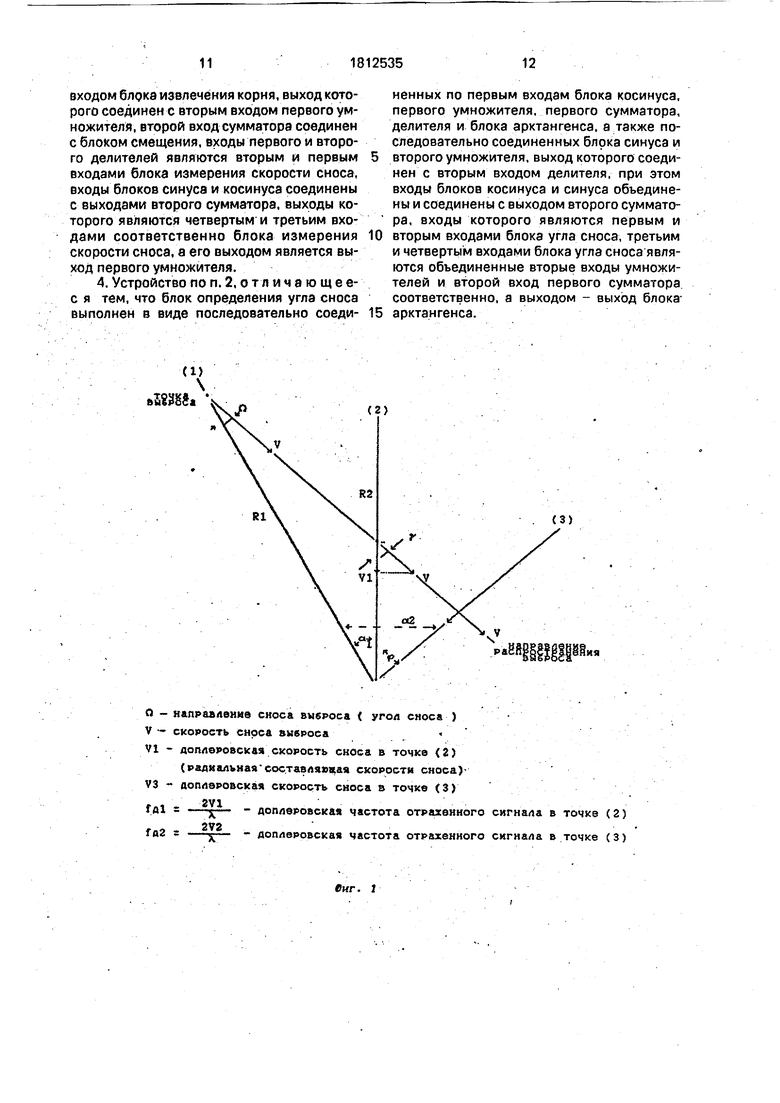
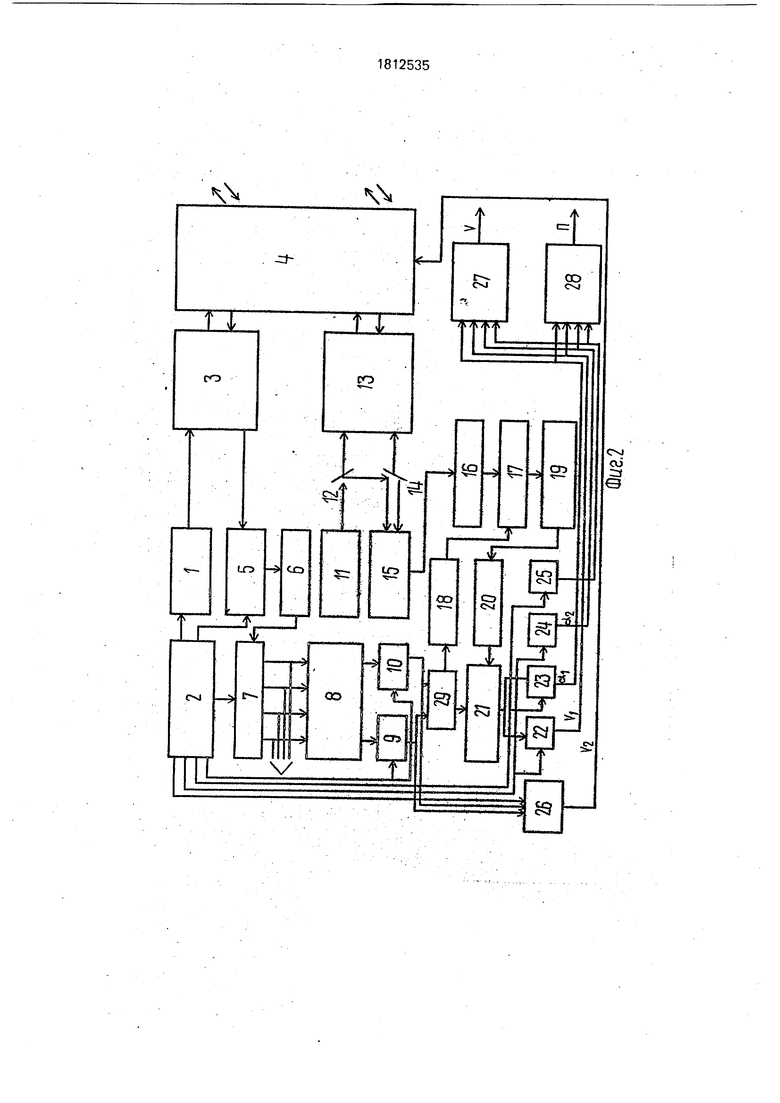
На фиг. 1 приведен график, поясняющий предлагаемый способ; на фиг. 2 - функциональная схема предлагаемого
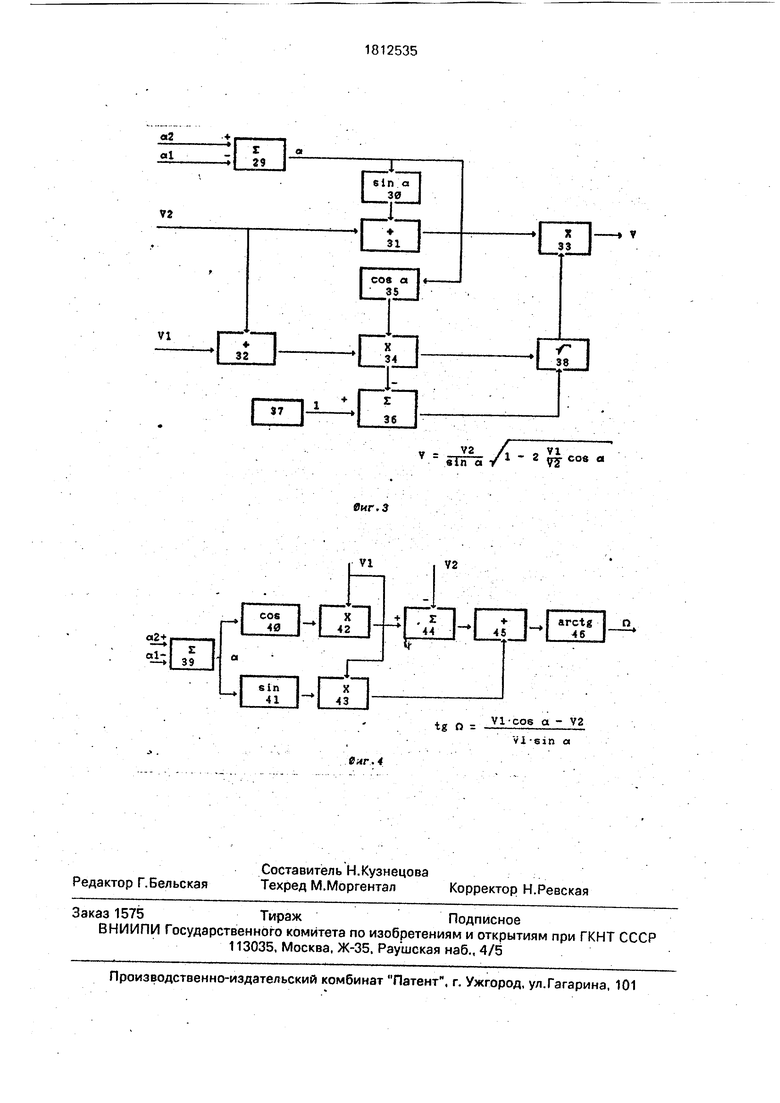
устройства; на фиг. 3 и 4 - функциональные схемы блоков определения скорости сноса и угла сноса.
На фиг. 1 изображены 1 - точка выброса; 2 - точка повторного зондирования импульсным лазерным излучателем и постоянным лазерным излучателем; 3-точка повторного зондирования постоянным лазерным излучателем.
Устройство содержит (фиг. 2) импульсный лазерный излучатель 1, вход которого, соединен с выходом синхронизатора 2, первая фокусирующая система 3, сканер 4, фотоприемник 5, выход которого соединен с усилителем б, ЁЫХОДОМ соединенный с первым входом измерителя пространственного распределения концентраций 7, соединенного с 1 входом блока определения предварительных значений скорости и угла сноса 8, выходы которого соединены с первыми входами запоминающих устройств 9 и 10. Непрерывный лазерный излучатель 11 оптически сопряжен со светоделителем 12 и второй фокусирующей системой 13, оптически сопряженной через светоделитель 14 с гетеродинным фотоприемным устройством 15, выход которого соединен с последовательно подключенным усилителем 16, смесителем 17, второй вход которого соединен с управляемым гетеродином 18, а выход -с последовательно соединенным усилителем промежуточной частоты 19, измерителем частоты 20 и суммирующим масштабирую- щим усилителем 21, выходы которого соединены с первыми входами запоминающих устройств 22 и 23, вторые входы которых, а также вторые входы запоминающих устройств 24 и 25, соединены с соответствующими выходами синхронизатора. Первые входы запоминающих устройств 24, 25 соединены с блоком определения угла разворота сканера 2.6. Выходы запоминающих устройств 22, 23, 24, 25 соединены с соответствующими входами блока определения скорости сноса 27 и соответствующими входами блока определения угла сноса 28. Выходы запоминающих устройств 9, 10 соединены со входами блока определения предварительных значений допплеровской скорости выброса и угла сноса 28. Работа блоков 8, 9, 10, 26 синхронизирована.
Блок определения скорости сноса (фиг. 3) содержит сумматор 29, выход которого соединен с блоком синусов 31, первый 31 и второй 32 делители, первый и второй умножители 33 и 34, и блок косинусов 35, при этом выходы блоков синусов 30 и косинусов 35 соединены соответственно со вторыми входами первого делителя 31 и второго умножителя 34. выход которого соединен с
первым входом второго сумматора 36, второй вход которого соединен с блоком смещения 37, а выход которого через блок извлечения корня 38 соединен со вторым
входом первого умножителя 33. Первые входы первого и второго умножителей 33 и 34 соединены соответственное выходами первого и второго делителей 31 и 32, входы которых являются соответственно первым и
0 вторым входами блока определения скорости сноса, а входы сумматора 29 являются третьим и четвертым входами блока определения скорости сноса выброса, выходом которого является выход первого умножителя
5 23.
Блок определения угла сноса 28 (фиг. 4) содержит первый сумматор 39, подсоединенный своим выходом к блоку косинусов 40 и блоку синусов 41, два умножителя 42 и 43,
0 первые входы которых соединены с выходами блоков косинуса 40 и синуса 41 соответственно, второй сумматор 44, первый вход которого соединен с выходом первого умножителя 41, делитель 45, первый и второй
5 входы которого соединен с выходами второго сумматора 44 и второго умножителя 43 соответственно, и блок арктангенса 46, вход которого соединен с выходом делителя 45, а выход является выходом блока измерения
0 угла сноса выброса. При этом входы первого сумматора 39 являются первым и вторым входами блока измерения угла сноса 28, а объединенные входы умножителей 42 и 43 и второй вход второго сумматора 45-третьим
5 и четвертым входами блока измерения угла сноса 28 соответственно.
Реализация способа и функционирование устройства осуществляется следующим образом.
0 Оптическая ось системы направляется в точку начала выброса (1).
Импульсный лазерный излучатель под действием команд блока 2 синхронизации формирует первый световой импульс, кото5 рый фокусируется передающим каналом оптической системы 3 и с помощью сканера 4 излучается в начальную точку выброса (1) (фиг. 1,2). Рассеянное выбросом оптическое излучение через сканер 4 попадает в прием0 ный канал оптической фокусирующей системы 3, которая фокусирует принятое оптическое излучение на фотоприемнике 5. Сформированный фотоприемником электрический сигнал усиливается усилителем б
5 и поступает в измеритель 7, который определяет распределение по дальности концентрации загрязняющих веществ ав выбросе по направлению зондирования. Это распределение имеет вид зависимости S(R). где R - текущая дальность до точек
зондирования. Измеренные значения зависимости S(R) подаются в блок 8 определения предварительных значений скорости и угла сноса выброса, где они запоминаются под действием соответствующей команды блока 1 синхронизации.
После этого блок 2 синхронизации выдает команду в блок 26 определения угла разворота сканера, под действием которой сканер 4 разворачивает оптическую ось си- стемы вдоль сноса выброса на небольшой угол ai (0,5-1,5°).
Затем импульсный лазерный излучатель 1 формирует второй оптический импульс, который через оптическую фокусирующую систему 2 и сканер 4 направляется в точку (2) вдоль направления распространения выброса, и измеритель 7 аналогичным образом по отраженному сигналу определяет второе значение распределения по дальности загрязняющих веществ S2(R) по направлению второго импульсного зондирования. Полученное распределение S2(R) также поступает в блок 9 и запоминается.
На основании данных, полученных при первом и втором импульсном зондированиях, блок 8 определения предварительных значений скорости и угла сноса выброса рассчитывает предварительные оценки величин скорости сноса выброса vnp и угла сноса Ллр. Для этого блок 8 определяет дальности до точек максимальной концентрации загрязняющих веществ в выбросе RI и R2 по первому и второму направлениям импульсного зондирования по формулам
Кмакс
р |мин
лаке
/ Si(R)RdR
Кмакс
Si (R) dR
RMHH
Vnp
Ri-R2 ARi-AR2
где Удиф - скорость диффузии вредных веществ в атмосфере (являющаяся постоянной величиной для данного района наблюдения; Д RI и A R2 - толщина выброса при первом и втором импульсном зондированиях:
ARi
г
ДМ
RMSKC „
/R2Si(R)RdR
RMMH
Яма ice
/Si(R)dR
RMMH RMBKC
/R2S2(R)RdR
RMHH
Кмакс
/S2(R)dR
RMHH
Полученные в блоке 8 приближенные значения vnp и Лпр запоминаются в ЗУ 9 и ЗУ 10 под действием соответствующих команд блока 2 синхронизатора. Схема 29 вы- числяет приближенное значение допплеровской скорости выброса и угла сноса второго импульсного зондирования в
точку выброса (2)
Удоппл.пр- - Vnp Sin Лпр
и на основе вычисленного значения устанавливает частоту управляемого гетеродина 18 допплеровского лидара равной
f „2 Удоппл.пр.
пч
, п Удоппл.пр.
-
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| Устройство для измерения голографических характеристик фоторегистрирующих сред | 1984 |
|
SU1254428A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Акустический локатор | 1981 |
|
SU991345A1 |
| Способ определения профиля неоднородности среды с частотной дисперсией | 1988 |
|
SU1608597A1 |
Изобретение относится к локационным системам. Цель изобретения - повышение точности и сокращение времени измерения. Устройство содержит импульсный лазерный излучатель, вход которого соединен с выходом синхронизатора, первую фокусирую щую систему, сканер, фотоприемник, выход которого соединен с усилителем, выходом соединенным с первым входом измерителя пространственного распределения концентраций, соединенного с первым входом блока определения предварительных значений скорости и угла сноса, выходы которого соединены с первыми входамипервых запоминающих устройств. Непрерывный лазерный излучатель оптически сопряжен со светоделителем и второй фокусирующей системой, оптически сопряженной через светоделитель с гетеродинным фотоприемным устройством, выход которого соединен с последовательно подключенным усилителем, смесителем, второй вход которого соединен с управляемым гетеродином, а выход - с последовательно соединенными усилителем промежуточной частоты, измерителем частоты и суммирующим масштабирующим усилителем, выходы которого соединены с первыми входами вторых запоминающих устройств вторые входы которых, а также вторые входы других третьих запоминающих устройств соединены с соответствующими выходами синхронизатора. Первые входы третьих запоминающихустройств соединены с блоком определения угла разворота сканера. Выходы вторых и третьих запоминающих устройств соединены с соответствующими входами блока измерения скорости сноса и соответствующими входами блока измерения угла сноса. Выходы первых запоминающих устройств соединены с входами блока определения предварительных значений допплеровской скорости выброса и угла сноса. Работа некоторых блоков синхронизирована. 2 с. и 2 з.п.ф-лы, 4 ил. ел с 00 to
Кмакс
/ S2(R)RdR
§мин
Ямакс
J S2 (R) dR
RMHH
где Нмакс - максимальная дальность импульсного зондирования, RMHH минимальная дальность зондирования. Предварительные значения направления угла сноса выброса определяются зависимостью
I R2-slnai AnP arctgRi R2Cosai ,
а приближенное значение скорости сноса выброса - формулой (рис.2}
где Я-длина волны излучения непрерывного СО-лазера (10,6мкм), fn4- промежуточная частота усилителя 19 промежуточной частоты.
После этого производится допплеровское зондирование выброса в направлении (2)(фиг. 2). Для этого излучение непрерывного СО-лазера 11 через светоделитель 12, вторую фокусирующую оптическую систему 13 и сканер 4 направляется вдоль оптической оси по направлению второго импульсного зондирования в точку выброса (2). Рассеянный выбросом догтплеровский оптический сигнал через сканер 4, вторую фокусирующую оптическую систему 13 и светоделитель 14 направляется в гетеродинное фотоприемное устройство 15, где принятый допплеровский оптический сигнал смешивается с опорным оптическим излучением, ответвленным из лазерного излучения непрерывного СО-лазера 11с помощью второго светоделителя 12.
Выделенный гетеродинным фотоприемным устройством 15 допплеровский сигнал с частоты Тд1 (сигнал разностной частоты) усиливается усилителем 16 и поступает в смеситель 17, который, используя сигналы управляемого гетеродина 18, переносит спектр допплеровского сигнала на промежуточную частоту. Сигнал промежуточной частоты усиливает усилителем 19 промежуточной частоты и подается в измеритель 20 частоты, выходом которого является измеренное значение частоты преобразованного смесителем 17 допплеровского сигнала
fl-fr + ffll
Суммирующий масштабирующий усилитель 21 преобразует измеренное значение частоты первого допплеровского зондирования fi в допплеровскую скорость выброса VAI по направлению первого допплеровского зондирования
уД1 АО
fl-fr
где АО - масштабирующий коэффициент, которая под действием соответствующей команды блока 2 синхронизации запоминается в ЗУ 22. Одновременно с этим в ЗУ 24 запоминается значение угла первого допплеровского зондирования а. После этого блок 26 определения угла разворота сканера рассчитывает угловую координату второй точки (3) допплеровского зондирования «2 относительно направления первого импульсного зондирования. Значение угла &2 рассчитывается по формуле
VAI
az - arctg
cos(/Vip+QI)
sin Лпр
Ri -КУд1
cos Лпр
cos (Лпр +QM)
где К - постоянная величина.
Затем производится второе допплеров- ское зондирование точки выброса (3) под углом щ по направлению к первому импульсному зондированию, и измеритель 20 частоты измеряет значение частоты второго допплероеского зондирования fz- Суммирующе-масштабный усилитель 21 аналогичным образом преобразует измеренное значение fa в оценку допплеровской скорости выброса Уд2 по направлению второго до пплеровского зондирования
, Т2 - f г Уд2 АО -g-
которая под действием соответствующей команды блока 2 запоминается в ЗУ 23. Одновременно с этим в ЗУ 25 запоминается значение угла второго допплеровского зондирования az.
После этого в устройстве определяются точные значения двух параметров пространственного распределения концентрации аэрозоля - скорости и угла сноса зондируемого выброса. Для этого данные из
ЗУ 22, 23, 24 и 25 вводятся в блок 27 определения точного значения скорости сноса выброса v. Расчет ведется согласно формуле
V4q1 Уд1СОз(02 -g.l)F
sin (02
icps(a
ту
Одновременно данные из ЗУ 22, 23, 24 и 25 поступают в блок 28 определения угла сноса выброса Л. Расчет ведется согласно формуле
,
Формула изобретения
точности и сокращения времени определения пространственного распределения концентраций аэрозоля в выбросе, импульсное зондирующее излучение направляют в точ- ку выброса, дополнительно осуществляют
повторное импульсное зондирование во второй точке, смещенной относительно точки выброса вдоль направления выброса, определяют пространственное распределение концентраций по направлению
дополнительного зондирования, определяют предварительные значения угла сноса и скорости распространения зондируемого выброса по убыванию максимума концентрации, осуществляют допплеровское зондирование во второй точке, определяют частоту fi отраженного допплеровского излучения и уточняют скорость распространения зондируемого выброса, повторно осуществляют посылку допплеровского зондирующе- го излучения в точку, смещенную в направлении убывания максимума концентрации на угол а,равный
......./dr+7 TsinAnP
01 - arctg
соз(Лпр +сцу
Ri -КVfll
cos (Лпр -f- «1)
COS Лпр
где К - const;
Уд1 и Лпр - предварительные значения угла сноса и скорости сноса выброса;
«1 - угол разворота направления зондирования во вторую точку относительно точки выброса;
RI - дальность до источника выброса, принимают отраженный допплеровский сигнал, определяют его частоту и определяют точные значения двух параметров про- странственногораспределения концентрации аэрозоля - скорости и угла сноса зондируемого выброса.
5
10
25
55
лазерного излучения посредством двух светоделителей и второй оптической системой в обратном ходе луча, второй усилитель. вход которого соединен с выходом гетеродинного фотоприемного устройства, последовательно соединенные смеситель, первый вход которого соединен с выходом второго усилителя, усилитель промежуточной частоты, измеритель частоты, суммирующий масштабирующий усилитель, а также управляемый гетеродин, выход которого соединен с вторым входом смесителя, два запоминающих устройства, первые входы которых соединены с первым и вторым входами соответственно блока определения предварительных значений скорости и угла сноса, вторые входы - с выходами синхронизатора, а выходы - с первым и вторым входами соответственно дополнительно введенного блока определения предварительного значения допплеровской скорости выброса и угла сноса, выход которого-одновременно соединен с вторым входом суммирующего масштабирующего усилителя и входом управляемого гетеродина, блок определения угла разворота сканера, первый вход которого соединен с соответствующим выходом синхронизатора, а второй и третий входы - с выходом первого и второго запоминающих устройств соответственно, третье и четвертое запоминающие устройства, первые входы которых соединены с выходом суммирующего масштабирующего усилителя, пятое и шестое запоминающие устройства, первые входы которых соединены с выходом блока определения угла разворота сканера, а вторые входы с третьего по шестое запоминающих устройств соединены с соответствующими выходами синх- рогенератора, блок определения скорости сноса, четыре входа которого соединены с выходами с третьего по шестое запоминающих устройств, и блок определения угла сноса, четыре входа которого соединены с выходами с третьего по шестое запоминающих устройств.
входом блоке извлечения корня, выход которого соединен с вторым входом первого умножителя, второй вход сумматора соединен с блоком смещения, входы первого и второго делителей являются вторым и первым входами блока измерения скорости сноса, входы блоков синуса и косинуса соединены с выходами второго сумматора, выходы которого являются четвертым и третьим входами соответственно блока измерения скорости сноса, а его выходом является выход первого умножителя.
V - СКОРОСТЬ сноса выброса«
VI - долларовойая СКОРОСТЬ сноса в точке 2
(радиальная-составляющая СКОРОСТИ сноса) V3 - доплэровская СКОРОСТЬ сноса в точке (3) 2V1
fai
ffl2
272
- доплеровская частота отраженного сигнала в точке (2)
- доплеровская частота отраженного сигнала в точке (3)
виг. Г
0
5
ненных по первым входам блока косинуса, первого умножителя, первого сумматора, делителя и блока арктангенса, а также последовательно соединенных блока синуса и второго умножителя, выход которого соединен с вторым входом делителя, при этом входы блоков косинуса и синуса объединены и соединены с выходом второго сумматора, входы которого являются первым и вторым входами блока угла сноса, третьим и четвертым входами блока угла сноса являются объединенные вторые входы умножителей и второй вход первого сумматора соответственно, а выходом - выход блока- арктангенса.
.-.яй/7
сое а
V i s i n a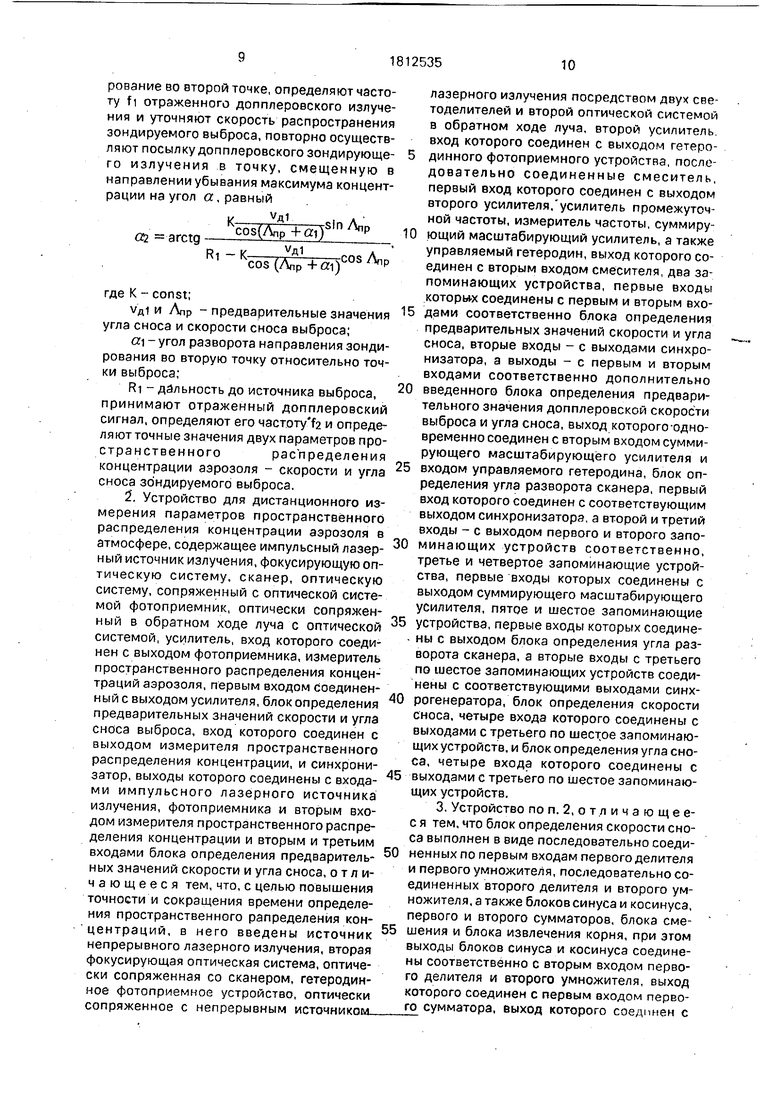
| Авторское свидетельство СССР № 833061, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения оптических характеристик атмосферы | 1976 |
|
SU606442A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
