Изобретение относится к сельскому хо зяйству. в частности к орошаемому растениеводству, и может быть использовано как устройство фитобазисной технологии возделывания растений в тепличных хозяйствах, лесных питомниках, селекционных делянках, а также в жестких природных условиях: на крутых склонах, откосах, оврагах и песчаных землях.
Цель изобретения - расширение технологических возможностей путем выполнения устройством полного цикла фитобазисной технологии возделывания растений по заданной программе, повышение точности выполнения операций и маневренности устройства в жестких природных условиях, механизация ручного труда.
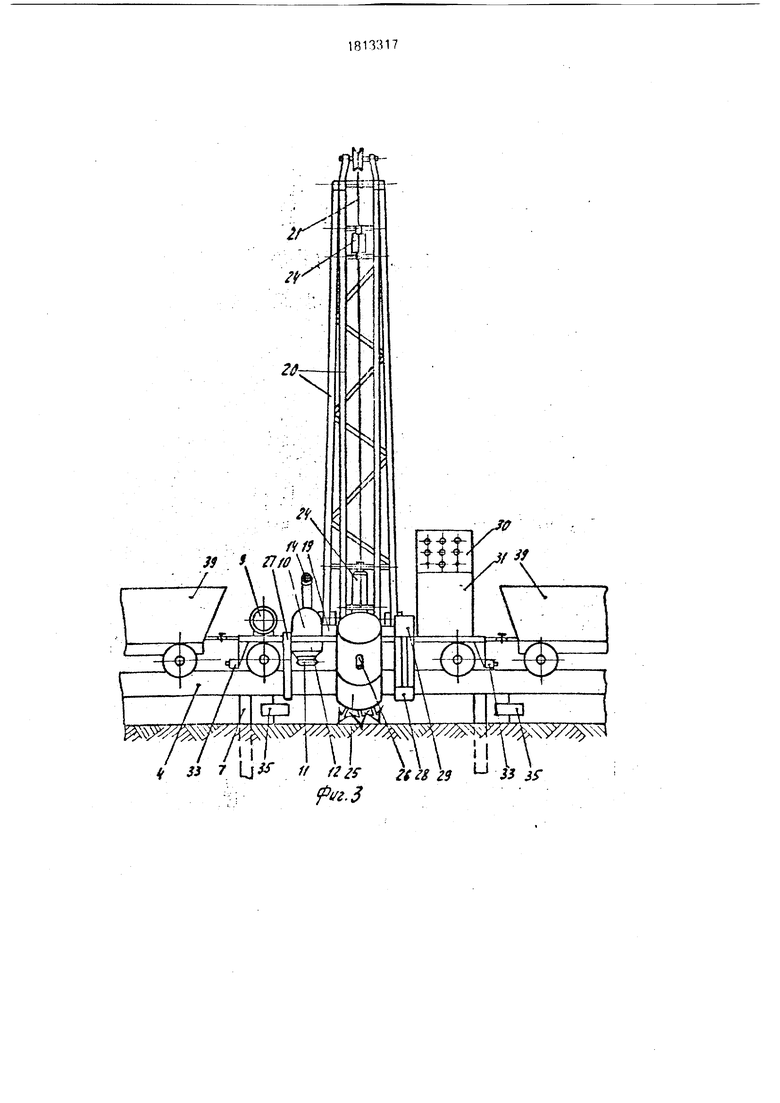
На фиг.1 показано устройство в плане; на фиг.2 - устройство, вид спереди; на фиг.З - устройство, вид сбоку; на фиг.4 - схема электрического структурного устройства.
Устройство для программированного возделывания растений Фитобазис (фиг.1) содержит центральную низконапорную насосную станцию 1, низконапорные надземные магистральные трубопроводы 2 с поворотными кругами 3 и полевой сборно- разборный монорельс 4, на котором смонтированы трубопровод 5 (фиг.2,3), токоподвод б и съемные опоры 7. На монорельсе 4 установлена приводная тележка 8 с электроприводом 9, на которой размещен насосный агрегат 10. Всасывающий патрубок 11 агрегата снабжен электромагнитным приводом 12, а его напорный трубопровод 13 оснащен водовыпусками 14.
Система энергоснабжения устройства включает трансформаторную подстанцию 15, соединенную через кабель 16 и вводное устройство 17 с троллеями 18 закрытого типа, установленными под монорельсом 4.
На приводной тележке 8 смонтирована поворотная платформа 19с двумя механическими руками 20 и трособлочной системой 21 с контактными датчиками 22 и толкателем 23. Каждая механическая рука 20 снабжена приводами 24 перемещения, сменными рабочими органами 25 и бесконтактным чувствительным датчиком 26, служащим для опознавания места нахождения растений.
На приводной тележке 8 установлены токосъемные 27, находящиеся в контакте с троллеями 18 и служащие для передачи энергии потребителям устройства:
На приводной тележке 8 установлены также захваты 28 с электромагнитными приводами 29 (фиг.4). шкаф 30 управления с
микропроцессором 31, датчик 32 позиционирования и конечные выключатели 33.
На монорельсе 4 установлены пластины 34 позиционирования, зажимы 35, краныклапаны 36 и гибкие поливные рукава 37. По концам монорельса 4 установлены упоры 38, с которыми взаимодействуют конечные выключатели 33 приводной тележки 8. Две транспортные тележки 39, соединенные
разъемно с приводной тележкой 8, также установлены на монорельсе 4. Растения 40 снабжены кольцами-метками 41.
Устройство работает следующим образом.
На механические руки 20 навешиваются сменные рабочие органы 25 согласно требо: ваниям технологии возделывания растений. В ручном режиме передвигают устройство по магистральному трубопроводу 2 через
поворотный круг 3 на сборно-разборный монорельс 4. По команде Пуск со шкафа 30 управления, приводная тележка 8 перемещается вперед при помощи электропривода 9. При прохождении датчика 32 позиционирования над пластиной 34 позиционирования сигнал с выхода датчика 32 поступает на вход микропроцессора 31, который выдает сигнал Останов и шкаф 30 управления, Приводная тележка 8 останавливается, механические руки 20 при помощи приводов
24 раздвигаются, сменные рабочие органы
25 выполняют одну из операций по возделыванию растений, записанную в память микропроцессора 31. Далее механические руки
20 складываются в транспортное положение, и. устройство перемещается вперед до следующей позиции останова. Цикл по возделыванию растений повторяется.
При подходе приводной тележки 8 к
концу монорельса 4 за счет взаимодействия конечных выключателей 33 с упорами 38 происходит останов устройства и возвращение его на исходную позицию. Процесс работы устройства осуществляется автоматически без участия оператора,
На всех позициях останова при движении механических рук 20трособлочная система 21 с контактными датчиками 22 и
толкателем 23 корректирует движение, а именно в момент рассогласования толкатель 23 действует на один из контактных датчиков 22, сигнал с которого поступает в микропроцессор 31, который выдает сигнал
в шкаф 30 управления на уменьшение скорости движения руки 20 до полного восстановления синхронизации. Кроме того, трособлочнэя система 21 поддерживает заданный уклон работы механических рук 20 и повышает устойчивость их опоры.
Используя бесконтактные чувствительные датчики 26 и кольца-метки 41 на растениях 40, устройство может определить точное место расположения растения, что расширяет технологические возможности устройства, например позволяет вести подвязку растений, убирать отдельные растения при индивидуальной селекции и т.п. Кольца-метки 41 наносятся алюминиевой краской или фольгой.
В зависимости от задачи устройство позволяет оперативно вести сборку-разборку монорельса 4, Управляя устройством в ручном режиме со шкафа 30, бурят скважины, устанавливают съемные опоры 7, на кото- рые крепят секции сборно-разборного мо- норельса 4. Секции монорельса 4 соединяются между собой при помощи зажимов 35. Передвигая устройство вперед, операции монтажа повторяют до полной сборки монорельса 4.
Устройство с транспортными тележками 39 доставляет на поле гибкие поливные рукава 37, которые крепятся к кранам-кла панам 36. ГТолив, опрыскивание растений можно вести при помощи насосного агрегата 10, всасывающий патрубок 11 которого снабжен электромагнитным приводом 12, а его напорный трубопровод 13 оснащен во- довыпусками 14. При точном останове уст- ройства , всасывающий патрубок 11 опускается при помощи привода 12 и входит в зацепление с краном-клапаном 36, наносный агрегат 10 включается и подает воду на поле, ....
Предложенное устройство является мобильным, компактным механизмом двустороннего действия со сменными рабочими органами, работающими в автоматическом и ручном режимах на делянках, в теплицах, на крутых склонах, на малых площадках, на песчаных почвах.
Использование устройства позволяет подавать на поле воду, сыпучие, твердые, жидкие вещества, органические и мине- ральные слаборастворимые удобрения, а
также транспортировать с поля урожай и отходы производства. Устройство исключает движение тракторов, машин по почве, тем самым сохраняет ее структуру.
Наличие сменных рабочих органов позволяет устройству выполнять большинство технологических операций по возделыванию растений:завоз грунта, выравнивание, планировку, глубокое рыхление, прикатыва- ние, посев, посадку растений, прополку в рядах и междурядьях, внесение удобрений, подкормку, полив, опрыскивание, опыление, косьбу, срезку кустов на пень, обрезку по контуру, уборку луковиц, уборку корнеплодов, сгребание пожнивших остатков, транспортирование урожая и пожнивших остатков.
Ф о р м у л а и з о б р е т е н и я
1. Устройство для программированного возделывания растений, содержащее подводящую сеть и приводную тележку с энергетической установкой, насосным агрегатом и системой автоматического управления приводами, отличающееся тем, что, с целью расширения технологических возможностей, повышения маневренности устройства, точности выполнения операций и механизации ручного труда, приводная тележка снабжена поворотной платформой с двумя манипуляторами с трособлочной системой их синхронизации, при этом каждый манипулятор снабжен приводом перемещения, сменными рабочими органами и бесконтактным датчиком наличия и расположения растений, а подводящая сеть выполнена в виде сборно-разборного монорельса, совмещенного с трубопроводом, то- коподводом и съемными опорами, причем на сборно-разборном монорельсе установлены транспортные тележки, разъемно соединенные с приводной тележкой.
2. Устройство поп.1,отличающее- с я тем, что всасывающий патрубок насосного агрегата установлен с возможностью перемещения в вертикальной плоскости.
w
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоопорная дождевальная установка непрерывного действия | 1979 |
|
SU1083973A1 |
| Многоопорная дождевальная установка непрерывного действия | 1979 |
|
SU1110417A2 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Устройство сбора саранчи | 2022 |
|
RU2799752C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| СПОСОБ СЛИВА И НАЛИВА РЕЗЕРВУАРОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2834081C1 |
| Стационарный секционный пробоотборник для нефти и нефтепродуктов | 2024 |
|
RU2838472C1 |
| Фронтальная дождевальная машина | 1983 |
|
SU1172494A1 |
| Установка для уничтожения неприятных запахов "Мокрый барьер" | 2016 |
|
RU2633081C1 |
| СПОСОБ МОСТОВОГО ОРОШАЕМОГО ЗЕМЛЕДЕЛИЯ С МИНИМАЛЬНОЙ ОБРАБОТКОЙ ПОЧВЫ И АГРОМОСТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2149530C1 |


Сущность изобретения: устройство содержит сборно-разборный монорельс 4 с трубопроводом, токоподводом и съемными опорами, на котором установлена приводная тележка с электроприводом 9 и насосным агрегатом 10. На приводной тележке смонтирована поворотная платформа 19 с двумя манипуляторами 20 и трособлочной системой 21. Манипуляторы 20 со сменными рабочими органами 25 раздвигаются с заданной скоростью и выполняют заложенную в память микропроцессора программу возделывания растений. 1 з.п. ф-лы, 4 ил.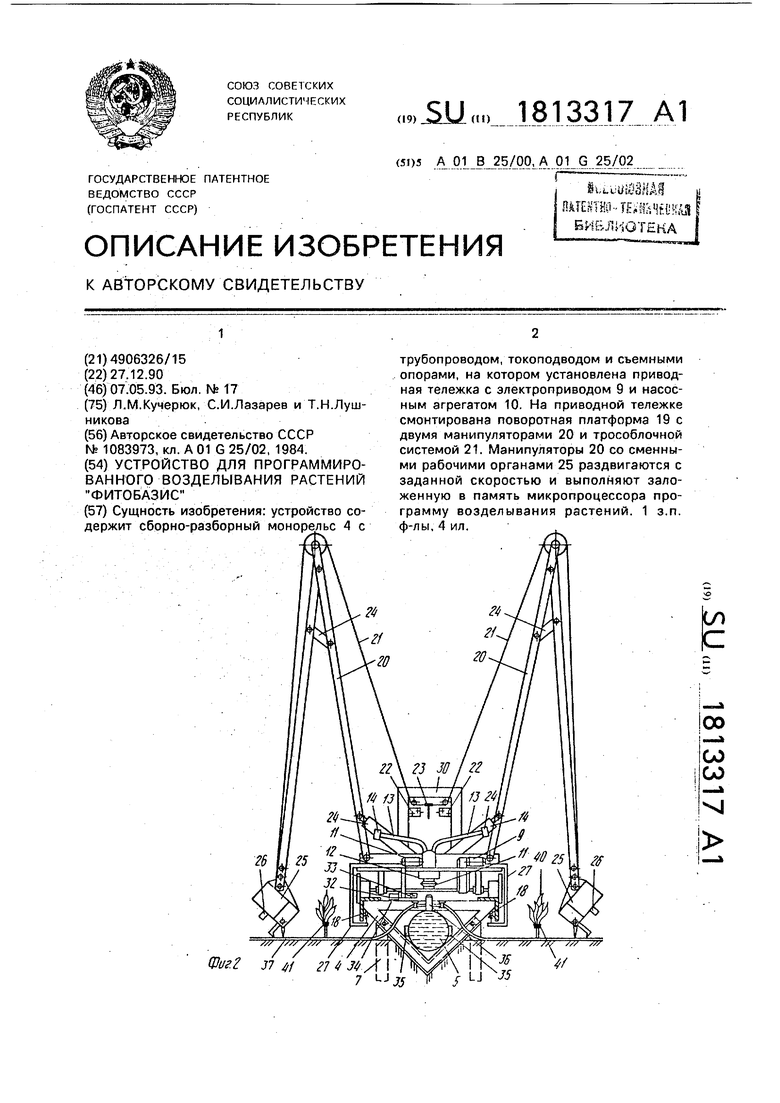
| Многоопорная дождевальная установка непрерывного действия | 1979 |
|
SU1083973A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
