Изобретение относится к роботизированным манипуляторам, а именно к роботизированным станциям для обслуживания железнодорожного подвижного состава [B25J 5/00, B25J 5/02, B25J 9/00, B25J 9/06, B61K 11/00, B61C 8/00, B60S 5/00, B60S 5/02].
Из уровня техники известна ИНТЕЛЛЕКТУАЛЬНАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА ПОДАЧИ ВОДЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И МЕТОД ПОДАЧИ ВОДЫ [CN 112793618 A, опубликовано: 14.05.2021], характеризующаяся наличием подсистемы центрального управления, подсистемы беспроводной связи, интеллектуального робота-наполнителя водой и подсистемы вспомогательного управления, подсистема центрального управления взаимодействует с интеллектуальным роботом-наполнителем водой для заполнения водой и подсистемой вспомогательного управления через подсистему беспроводной связи, подсистема вспомогательного управления выполнена с возможностью идентификации информации о транспортном средстве, подлежащем заправке водой и местоположения точки остановки, а также для отправки идентификационной информации в подсистему центрального управления через подсистему беспроводной связи, подсистема центрального управления используется для получения идентификационной информации от вспомогательной подсистемы управления и отправки команды для подачи воды интеллектуальному роботу-наполнителю водой через подсистему беспроводной связи, интеллектуальный робот-наполнитель водой используется для получения команд подачи воды от подсистемы центрального управления, автоматического определения местоположения резервуара с водой заправляемого вагона и выполнения операций автоматического наполнения водой, при этом интеллектуальный робот-наполнитель водой содержит блок управления, интеллектуальную транспортную тележку и подсистему подачи воды, блок управления соответственно соединен связью с интеллектуальной транспортной тележкой, подсистемой подачи воды и подсистемой центрального управления и используется для получения команды подачи воды от подсистемы центрального управления, управления перемещением интеллектуальной транспортной тележки к резервуару вагона и управления подсистемой подачи воды после позиционирования, интеллектуальная транспортная тележка содержит кузов, приводное устройство, вспомогательное предохранительное устройство, навигационное устройство и устройство электропитания, при этом приводное устройство используется для приведения в движение кузова тележки, навигационное устройство используется для навигации кузова тележки, вспомогательное устройство безопасности используется для обхода препятствий кузовом тележки, устройство электропитания используется для подачи питания, необходимого приводному устройству, вспомогательному устройству безопасности и навигационному устройству, навигационное устройство содержит индукционную катушку с магнитной полосой, установленную на земле, подсистема подачи воды включает в себя устройство подачи воды, устройство мониторинга и вспомогательное устройство позиционирования, при этом устройство подачи воды служит для автоматического впрыска воды, устройство мониторинга используется для контроля объема автоматического впрыска воды, и/или давления воды и/или качества воды, вспомогательное устройство позиционирования используется для определения положения отверстия для впрыска воды в резервуар вагона и позиционирования между трубой подачи воды и отверстием для впрыска воды, вспомогательное устройство позиционирования содержит многоосный гибкий промышленный робот-манипулятор, датчик расстояния и устройство получения изображения, подсистема вспомогательного управления включает в себя устройство распознавания номера транспортного средства и устройство позиционирования транспортного средства, устройство распознавания номера транспортных средств используется для идентификации информации о транспортном средстве, а информация о транспортном средстве включает в себя одну или несколько данных электронной метки, номер транспортного средства, номер терминала, тип транспортного средства, устройство позиционирования транспортного средства используется для определения местоположения места для парковки, устройство позиционирования транспортного средства содержит лазерный дальномер, или ультразвуковой радар, или камеру.
Способ заправки водой на основе интеллектуальной роботизированной системы подачи воды железнодорожного транспортного средства включает следующие этапы:
подсистема вспомогательного управления распознает информацию о транспортном средстве, которое необходимо заправить и местоположение точки парковки и отправляет идентификационную информацию в подсистему центрального управления через подсистему беспроводной связи;
подсистема центрального управления получает и обрабатывает идентификационную информацию от подсистемы вспомогательного управления и отправляет команду на подачу воды интеллектуальному роботу-наполнителю водой через подсистему беспроводной связи;
интеллектуальный робот-наполнитель водой используется для получения команд подачи воды от подсистемы центрального управления, автоматического определения местоположения резервуара с водой заправляемого транспортного средства и выполнения операций автоматического наполнения водой.
Также из уровня техники известен РОБОТ ДЛЯ ВОДОСНАБЖЕНИЯ ПОЕЗДА И СПОСОБ ВОДОСНАБЖЕНИЯ [CN 109367577 A, опубликовано: 22.02.2019], в котором способ включает следующие этапы:
используя компонент позиционирования первого уровня, определяют информацию о местонахождении остановки поезда и отправляют ее в центр управления;
центр управления получает информацию о местонахождении остановки и объединяет информацию о поезде для расчета расчетных координат транспортного средства, в которое необходимо заправить воду, и управляет роботом для заправки поезда, чтобы он двигался к расчетным координатам, при этом компонентом позиционирования второго уровня определяют местоположение вагона, в который необходимо долить воду для остановки робота;
используя компонент позиционирования третьего уровня, определяют местоположение порта впрыска воды на соответствующем вагоне и передают информацию о позиции в центр управления;
после получения информации о местоположении центр управления робота приводит в действие блок подачи воды, чтобы пристыковать порт подачи воды к соответствующему вагону и осуществить подачу воды.
Наиболее близким по технической сущности является СИСТЕМА УПРАВЛЕНИЯ ПОДАЧЕЙ ВОДЫ И СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ВОДЫ ДЛЯ АВТОМАТИЧЕСКОЙ ПОДАЧИ ВОДЫ ВО ВРЕМЯ ОСТАНОВКИ ПОЕЗДА [CN 112644525 A, опубликовано: 13.04.2021], характеризующаяся тем, что служит для нагнетания воды в резервуар для воды поезда на остановке, при этом система управления подачей воды включает в себя автоматического робота для заполнения водой, снабженного первым позиционирующим модулем, механической рукой и приводным механизмом для приведения в движение автоматического робота для заполнения водой, при этом первый позиционирующий модуль предназначен для позиционирования с крышкой отверстия для подачи воды на боковой стенке поезда, механическая рука снабжена вторым позиционирующим модулем и пистолетом для подачи воды, а второй позиционирующий модуль используется после того, как крышка отверстия для подачи воды на боковой стенке поезда открыта, для позиционирования с отверстием для подачи воды, а пистолет для подачи воды сообщается с источником воды через трубопровод, а трубопровод снабжен компонентом управления водой для управления включением и выключением водяного контура, контроллер электрически соединен с первым модулем позиционирования, вторым модулем позиционирования, приводным механизмом, компонентом управления водой и механической рукой, контроллер после работы первого модуля позиционирования управляет приводным механизмом и механической рукой чтобы открыть крышку отверстия для подачи воды и вставить пистолет для подачи воды с помощью второго модуля позиционирования, после чего управляя компонентом управления водой, чтобы осуществить подачу воды в резервуар поезда, при этом система управления подачей воды дополнительно содержит устройство обнаружения остановки поезда, подключенное к входу контроллера, и представляющее собой датчики колес, которые используются для обнаружения колес поезда, или множество фотоэлектрических датчиков, последовательно расположенных на внешней стороне пути по всей длине пути поезда в зоне прибытия, или датчик шума, который используется для определения интенсивности шума, первый модуль позиционирования и второй модуль позиционирования выполнены в виде видеокамер.
Основной технической проблемой аналогов и прототипа является ограниченная функциональность, обусловленная реализацией конструктивных решений, направленных только на заправку вагона, исключающие другие обслуживающие железнодорожный подвижный состав операции, такие как слив канализационных отходов из баков-накопителей вагонов или заправка локомотивов жидким топливом. Известно, что существуют виды локомотивов, энергетические установки которых могут работать на жидком топливе, например, на дизельном топливе, или сжиженном природном газе, или сжиженном водороде и т.д. Заправка единицы железнодорожного состава в патентах аналогов и прототипа не предусматривает мойку горловин от грязи перед заправкой. Последнее приводит к нарушению санитарно-гигиенических требований, или к загрязнению заправляемого топлива, для соблюдения которых потребуется внедрение дополнительных конструктивных решений или привлечение человека, что уже не позволяет говорить об автоматизации процессов.
Задача изобретения состоит в устранении недостатков аналогов и прототипа.
Технический результат изобретения заключается в повышении функциональности обслуживающего железнодорожный подвижный состав роботизированного комплекса.
Указанный технический результат достигается за счет того, что способ слива и налива резервуаров железнодорожного подвижного состава, включающий в себя следующие этапы:
- размещение роботизированного комплекса для слива и налива резервуаров железнодорожного подвижного состава возле путей остановки обслуживаемой единицы железнодорожного подвижного состава в пределах рабочего пространства робота упомянутого комплекса;
- определение местоположения обслуживаемой единицы подвижного состава, необходимого для начала обслуживания с передачей информации в модуль управления робота упомянутого комплекса;
- подача сигнала о начале работы;
- определение с помощью модуля технического зрения местоположения горловины резервуара единицы подвижного состава;
- открывание с помощью манипулятора упомянутого робота горловины резервуара обслуживаемой единицы подвижного состава, при этом для слива жидкости открывают сливную горловину резервуара, а для залива жидкости - заливную горловину резервуара;
- осуществление слива или налива резервуара;
- закрывание с помощью манипулятора упомянутого робота горловины резервуара обслуживаемой единицы подвижного состава;
- подача сигнала о завершении работы;
отличающийся тем, что
используют роботизированный комплекс, оснащенный набором сменных насадок манипулятора в виде инструментов для очистки/мойки и взаимодействия со сливным и/или заправочным узлами, при этом упомянутые открывание и закрывание горловины резервуара осуществляют с использованием соответствующей насадки, а перед открыванием соответствующей горловины резервуара производят очистку резервуара с использованием насадки манипулятора для очистки/мойки.
Роботизированный комплекс для слива и налива резервуаров железнодорожного подвижного состава, содержащий корпус, промышленный интеллектуальный робот, смонтированный внутри корпуса и включающий в себя манипулятор и модуль управления, при этом манипулятор робота выполнен в виде механической руки из шарнирно соединенных между собой звеньев, модуль технического зрения, смонтированный на манипуляторе, резервуары с трубопроводами и средства для определения местоположения обслуживаемой единицы подвижного состава, отличающийся тем, что он снабжен набором сменных насадок в виде инструментов для очистки/мойки и взаимодействия со сливным и/или заправочным узлами обслуживаемой единицы подвижного состава и соединения их трубопроводами с резервуарами комплекса, при этом каждая из насадок размещена в своем гнезде на держателе внутри корпуса, положение каждого гнезда запрограммировано в модуле управления с возможностью программируемого изъятия манипулятором робота требуемой насадки для выполнения соответствующей операции и возврата насадки в свое гнездо держателя после окончания операции, а боковая стенка корпуса со стороны расположения обслуживаемой единицы подвижного состава выполнена с проемом.
В частности корпус выполнен в виде нижнего основания, боковых стенок и крыши или в виде контейнера.
В частности корпус снабжен проушинами с возможностью зацепления с ними крюков подъемного механизма или основание корпуса выполнено в виде поддона с возможностью взаимодействия с вилами погрузчика.
В частности корпус выполнен с возможностью установки на шасси транспортного средства, в том числе отдельного вагона или платформы с возможностью передвижения по железнодорожным путям.
В частности проем в корпусе снабжен сдвижной дверью или подъемными воротами.
В частности при размещении комплекса между железнодорожными путями проемы выполнены в двух боковых стенках корпуса с его противоположных сторон, обращенных к обоим железнодорожным путям.
В частности манипулятор робота выполнен, по меньшей мере, c пятью степенями свободы.
В частности модуль технического зрения манипулятора выполнен в виде сенсорных датчиков, цифровой камеры, считывателей RFID-меток, QR-кодов, штрих-кодов.
В частности модуль управления выполнен с возможностью подключения пульта дистанционного управления.
В частности модуль управления оснащен экраном для интерфейсного взаимодействия с пользователем.
В частности средства для определения местоположения обслуживаемой единицы подвижного состава выполнены в виде индуктивных датчиков, при этом один из датчиков смонтирован на уровне колесной тележки, а второй смонтирован на расстоянии от первого, соответствующем расстоянию от колесной тележки до середины отрезка, соответствующего расстоянию между соседними крайними колесными тележками двух соседних единиц.
В частности средства для определения местоположения обслуживаемой единицы подвижного состава выполнены в виде видеокамеры, смонтированной на боковой стенке корпуса, обращенной к обслуживаемой единице.
В частности набор сменных насадок содержит инструмент для очистки/мойки в виде пистолета высокого давления или распылительной форсунки, сообщенных трубопроводом с резервуаром с водой для очистки узлов единицы подвижного состава.
В частности набор сменных насадок содержит инструмент в виде захвата для открывания/закрывания горловины резервуара обслуживаемой единицы подвижного состава.
В частности набор сменных насадок содержит инструмент, выполненный с возможностью одновременного открывания горловины резервуара и сообщения посредством трубопровода резервуара единицы подвижного состава с резервуаром комплекса.
В частности комплекс снабжен насосами для принудительной откачки/подачи жидкости и подачи воздуха, соединенными с трубопроводами резервуаров комплекса.
В частности резервуары комплекса смонтированы внутри корпуса или снаружи.
Краткое описание чертежей.
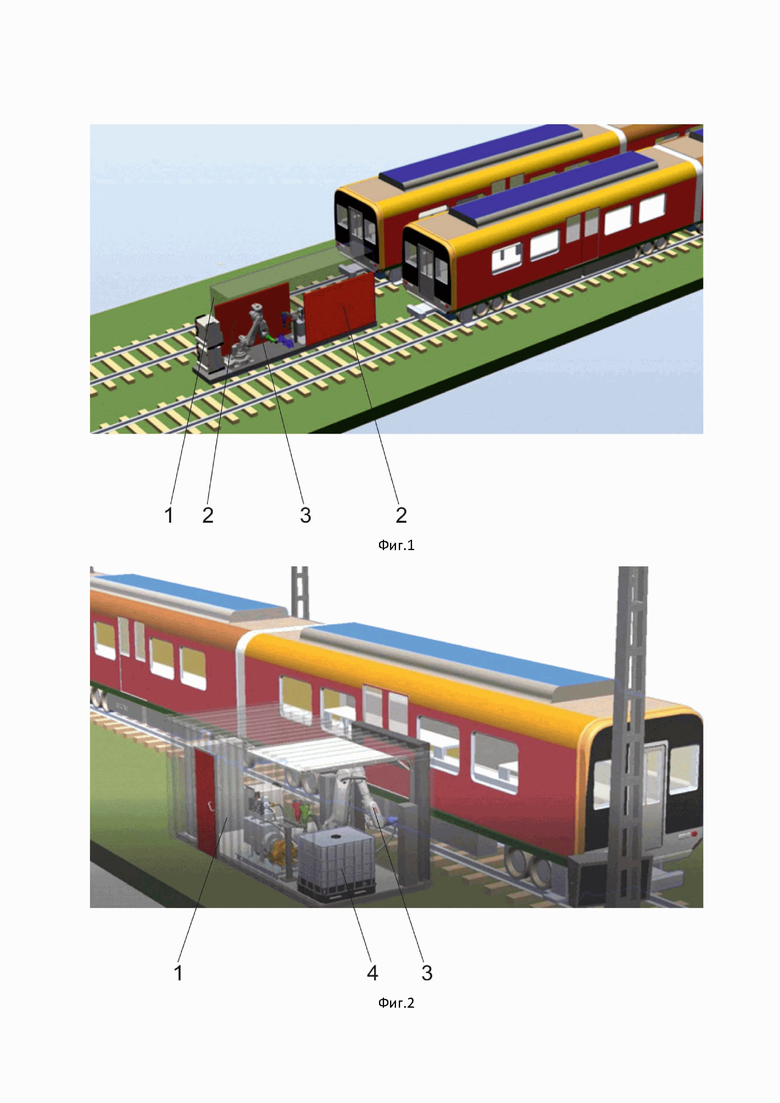
На фиг. 1-2 показан роботизированный комплекс для обслуживания железнодорожного подвижного состава.
На фигурах обозначено: 1 - корпус, 2 - двери, 3 - манипулятор, 4 - резервуары комплекса.
Осуществление изобретения.
Изобретение направлено на проведение обслуживания железнодорожного подвижного состава в части слива баков-накопителей канализационной системы, заправки воды и/или жидкого топлива в резервуары состава, такие как водяные, топливные баки и представляет собой роботизированный комплекс, содержащий необходимые насадки для подключения к соответствующим горловинам баков.
Известно, что железнодорожный подвижной состав представляет собой локомотивы, грузовые вагоны, пассажирские вагоны локомотивной тяги и мотор-вагонный подвижной состав, а также иной предназначенный для обеспечения осуществления перевозок и функционирования инфраструктуры железнодорожный подвижной состав [Федеральный закон от 10.01.2003 N 17-ФЗ "О железнодорожном транспорте в Российской Федерации"].
Единица железнодорожного подвижного состава - отдельный объект железнодорожного подвижного состава. Отдельными объектами железнодорожного подвижного состава являются локомотивы, вагоны, автомотрисы, электро- и дизель-поезда (или их секции), рельсовые автобусы, мотовозы, дрезины, путевые машины на железнодорожном ходу [ГОСТ Р 52944-2008, статья 5].
Роботизированный комплекс для обслуживания железнодорожного подвижного состава содержит закрытый внешний корпус 1 (см. фиг. 1-2), образованный нижним основанием, боковыми стенками и крышей и может быть выполнен, например, в виде контейнера на единой раме, в том числе в некоторых вариантах реализации с устройствами для обеспечения погрузо-разгрузочных работ, что обеспечивает его защиту от внешнего воздействия, мобильность и позволяет оперативно перемещать на любое место эксплуатации. В качестве устройств для обеспечения погрузочно-разгрузочных работ могут быть проушины с возможностью зацепления с ними крюков подъемного механизма, или выполнение основания с зазорами по принципу поддона с возможностью взаимодействия с вилами погрузчика и т.д.
Для обеспечения мобильности комплекс может быть установлен на шасси транспортного средства, в том числе отдельного вагона или платформы с возможностью перемещения на другой участок обслуживания или для обслуживания подвижного состава в требуемом месте.
По крайней мере, в одной из боковых стенок корпуса 1, обращенной при расположении комплекса к обслуживаемой единицы железнодорожного подвижного состава, выполнен проем, который может быть снабжен сдвижной одной или двумя дверями 2. В одном из вариантов реализации при условии размещения комплекса между железнодорожными путями, корпус 1 проемы могут быть выполнены с двух противоположных сторон корпуса 1 обращенных к обоим железнодорожным путям.
Функциональная часть комплекса содержит промышленный интеллектуальный робот, манипулятор 3 которого смонтирован внутри корпуса 1 своим корпусом (основанием) на нижнем или верхнем основаниях и напротив проема. Манипулятор 3 выполнен в виде механической руки из шарнирно соединенных между собой звеньев. Шарнирные соединения звеньев механической руки снабжены сервоприводами. Манипулятор 3 выполнен, как минимум, c пятью степенями свободы.
Манипулятор 3 выполнен с возможностью смены в автоматическом режиме насадок, монтируемых, например, быстроразъемным соединением. Соединение может быть выполнено механическим или магнитным. В одном из вариантов реализации все необходимые насадки могут быть смонтированы на одном основании, монтируемым к манипулятору 3 и их выбор осуществляется исходя из выполняемой операции, для чего они могут быть выполнены револьверными.
На манипуляторе 3 может быть смонтирован, один или несколько модулей технического зрения, выполненных, например, в виде сенсорных датчиков, цифровой камеры, считывателей RFID-меток, QR-кодов, штрих-кодов и т.д.
Управление манипулятором 3 осуществляется с помощью модуля управления промышленного робота, к которому может быть подключен пульт дистанционного управления (на фигурах не показаны). Модуль управления робота оснащен экраном для интерфейсного взаимодействия с пользователем.
Комплекс снабжен средствами определения местоположения обслуживаемой единицы подвижного состава, выполненными в виде датчиков или модуля.
Датчики определения местоположения обслуживаемой единицы железнодорожного подвижного состава (на фигурах не показаны), могут быть выполнены, например, индуктивными, при этом один из таких датчиков, в варианте реализации их индуктивными, смонтирован на уровне колесной тележки единицы подвижного состава, а второй смонтирован на расстоянии от первого, соответствующем расстоянию от колесной тележки до середины отрезка, соответствующего расстоянию между соседними крайними колесными тележками двух соседних единиц состава. Датчики определения местоположения подключены к модулю управления комплекса, который находится в постоянном ожидании срабатывания датчиков и сохранении сигнала в течении Х секунд. Это расценивается как приход состава на обслуживание.
Модуль определения местоположения обслуживаемой единицы железнодорожного подвижного состава может быть выполнен в виде видеокамеры, смонтированная на боковой поверхности корпуса комплекса, обращенной к обслуживаемой единиц подвижного состава. Модуль определения местоположения определяет положение остановки единицы подвижного состава, после чего передает информацию в модуль управления комплекса на начало обслуживания или на корректировку положения подвижного состава, о чем модуль управления оповещает диспетчера станции или машиниста поезда любыми известными способами, например, с помощью системы связи, реализованной на станции.
Опционально - готовность подвижного состава к обслуживанию после его остановки может быть передана по сетям связи, реализованных на станции, звуковым сигналом, с помощью любой принятой для этого системы оповещения и т.д.
Насадки манипулятора 3 комплекса представляют собой конструктивно и функционально связанные с комплексом инструменты, предназначенные для очистки (мойки) и взаимодействия со сливным и/или заправочным узлами соответствующего резервуара обслуживаемой единицы подвижного состава.
Так для очистки (мойки) насадка может быть выполнена, например, в виде пистолета высокого давления или распылительной форсунки, сообщенной трубопроводом с резервуаром с водой для очистки узлов подвижного состава, в том числе сливного и/или заправочного узла от пыли, грязи, налипшего снега с помощью мойки высокого давления и/или сжатого воздуха.
Для взаимодействия со сливной горловиной резервуара обслуживаемой единицы подвижного состава, например, бака-накопителя, или водяного бака с технической и питьевой водой, топливного бака и т.д. насадка может быть выполнена в виде механического или магнитного захвата с возможностью взаимодействия со сливной горловиной взаимозацеплением или за счет магнита для слива из этих резервуаров соответствующих жидкостей и закрытия их после слива. В этом варианте реализации для взаимодействия с горловиной резервуара обслуживаемой единицы подвижного состава, например, бака-накопителя, или водяного бака с технической и питьевой водой, или топливного бака для слива используется дополнительная насадка для взаимодействия с упомянутой горловиной и откачки по трубопроводу, на котором смонтирована упомянутая насадка, жидкости в промежуточную емкость.
В одном из вариантов реализации для слива из резервуара жидкости насадка манипулятора 3 может быть выполнена с возможностью одновременного открывания сливного узла и сообщения резервуара единицы подвижного состава трубопроводом с промежуточной емкостью, для чего упомянутая насадка манипулятора 3 смонтирована, соответственно, на трубопроводе. Слив, как указано выше, преимущественно осуществляется в промежуточную емкость, расположенную, как правило, рядом с комплексом.
Для взаимодействия с заправочным узлом резервуара обслуживаемой единицы подвижного состава, например, водяного бака с технической и питьевой водой или топливного бака, насадка манипулятора 3 может быть выполнена в виде механического или магнитного захвата с возможностью открывания/закрывания этой сливной горловины. В одном из вариантов реализации для заправки резервуара жидкостью насадка манипулятора 3 может быть выполнена с возможностью одновременного открывания/закрывания заливного узла и сообщения резервуара обслуживаемой единицы подвижного состава трубопроводом с емкостью, содержащей заправочную жидкость, для чего упомянутая насадка манипулятора 3 смонтирована, соответственно, на трубопроводе.
В варианте реализации насадки манипулятора 3 для заправочного узла только для открывания/закрывания заливной горловины для заправки резервуара единицы подвижного состава используется дополнительная насадка для взаимодействия с упомянутой горловиной и подачи по трубопроводу, на котором смонтирована упомянутая насадка, жидкости в резервуар подвижного состава.
Сообщающие резервуары единицы подвижного состава и резервуары комплекса трубопроводы снабжены насосами для принудительной откачки/подачи жидкости, подачи воздуха. Резервуары комплекса 4 могут быть смонтированы как внутри корпуса 1 комплекса, так и снаружи.
Все сменные насадки манипулятора 3 размещены в гнездах на держателе внутри корпуса 1 комплекса, каждая в своем гнезде, положение которого запрограммировано в модуле управления комплекса с возможностью программируемого изъятия роботом нужной насадки при выполнении конкретной операции обслуживания и возврата насадки в это же гнездо держателя после окончания операции обслуживания. В одном из вариантов реализации гнездо держателя снабжено меткой позиционирования, например, RFID-меткой, QR-кодом, штрих-кодом и т.д., считываемой модулем технического зрения манипулятора 3.
Способ обслуживания железнодорожного подвижного состава работает следующим образом.
После остановки состава на станции или в тупике роботизированный комплекс для обслуживания, установленный в непосредственной близости от путей остановки состава и, соответственно, обслуживаемой ее единицы, с помощью датчиков или модуля определения местоположения определяет корректное местоположение единицы подвижного состава, необходимое для начала обслуживания. Точность места остановки единицы подвижного состава определяется, прежде всего, рабочим пространством робота.
При срабатывании датчиков или получением от модуля информации, раскрывающей правильное позиционирование единицы подвижного состава модуль управления, по заранее запрограммированному алгоритму, приступает к управлению обслуживанием подвижного состава. Алгоритм может включать в себя максимально возможное количество операций по обслуживанию подвижного состава, различную их совокупность, последовательность, повторяемость и т.д., зависящие от потребности в обслуживании. Варианты таких алгоритмов, как правило, программируются в память модуля управления в виде предустановленных режимов работы, который выбирают перед очередным использованием комплекса.
Заявленный роботизированный комплекс предусматривает выполнение следующих операций:
контроль позиционирования единицы подвижного состава для ее обслуживания;
оповещение о корректной/некорректной остановке единицы подвижного состава для обслуживания;
оповещение о наличии в резервуарах комплекса необходимых жидкостей (воды технической, воды питьевой, жидкого топлива), об отсутствии в промежуточной емкости жидких отходов;
оповещение о начале/окончании слива/залива жидкостей;
очистка сливного и/или заправочного узла единицы подвижного состава от пыли, грязи, налипшего снега с помощью насадки манипулятора 3, представляющей собой насадки для чистки, такую как, пистолет мойки высокого давления и/или сжатого воздуха;
открывание сливной горловины бака-накопителя насадкой для открывания/закрывания и подключение к сливной горловине насадки, сообщающей трубопроводом бак-накопитель с промежуточной емкостью или подключение к сливной горловине бака-накопителя насадки, сообщающей трубопроводом бак-накопитель с промежуточной емкостью с одновременным открыванием горловины;
слив из бака-накопителя жидких канализационных отходов, при этом завершение операции слива модуль управления контролирует по сигналу о разрежении в линии, который поступает от насоса;
отключение от сливной горловины насадки с одновременным этой же насадкой или последующим закрыванием сменной насадкой горловины бака-накопителя;
открывание заливной горловины резервуара единицы подвижного состава насадкой для открывания/закрывания и подключение к заливной горловине насадки, сообщающей трубопроводом резервуар единицы подвижного состава с резервуаром комплекса или подключение к заливной горловине резервуара насадки, сообщающей трубопроводом резервуар единицы подвижного состава с резервуаром комплекса с одновременным открыванием горловины;
подача в резервуар единицы подвижного состава из резервуара комплекса жидкости (воды технической, воды питьевой, топлива);
отключение от заливной горловины резервуара единицы подвижного состава насадки с одновременным этой же насадкой или последующим закрыванием сменной насадкой горловины резервуара обслуживаемой единицы подвижного состава, при этом завершение операции залива модуль управления контролирует по сигналу о переполнении резервуара, в который заливают жидкость или отсечение клапан, которым может быть снабжена насадка манипулятора, или замыканием заливной жидкости датчика насадки манипулятора и т.д.;
смена насадок на манипуляторе;
автоматическое соединение/разъединение манипулятора с насадками;
размещение насадок в гнездах держателя;
включение/отключение насосов, клапанов и т.д.
В некоторых вариантах реализации сливные и/или заливные горловины бака-накопителя и резервуаров единицы подвижного состава вместо крышек могут быть снабжены механическими или электрическими клапанами, выполненными с возможностью взаимодействия с насадкой манипулятора 3 после ее присоединения. В таком случае, отдельной для открывания/закрывания горловины насадки не требуется и открывание/закрывание горловины осуществляется с помощью той же насадки, с помощью которой осуществляется слив/подача жидкости.
По окончании обслуживания железнодорожного состава подвижного состава комплекс возвращается в исходное положение и оповещает об успешном завершении операции.
В случае ошибок в выполнении, заданных в модуле управления алгоритмов, модуль управления выдает предупреждающий сигнал, после чего персоналом считываются ошибки и принимаются меры к их исправлению.
Преимущества настоящего изобретения:
- расширение функций, выполняемых одним комплексом (позиционирование, мойка, сушка, слив, подача, открывание, закрывание, смена насадок, резервуаров);
- сокращение времени обслуживания железнодорожного подвижного состава;
- обеспечение бесперебойной работы удаленных площадок обслуживания;
- освобождение персонала от вредных и тяжелых операций;
- круглосуточная работа;
- снижение себестоимости на обслуживание подвижного состава;
- минимальное техническое обслуживание.
Группа изобретений относится к области робототехники и может быть использована в процессе обслуживания железнодорожного подвижного состава для слива и налива резервуаров состава. Способ включает в себя размещение роботизированного комплекса для слива и налива резервуаров возле путей остановки обслуживаемой единицы состава в пределах рабочего пространства робота упомянутого комплекса, определение местоположения обслуживаемой единицы состава, подачу сигнала о начале работы, определение с помощью модуля технического зрения местоположения горловины резервуара, открывание с помощью манипулятора горловины соответствующего резервуара, осуществление слива или налива резервуара, закрывание с помощью манипулятора горловины резервуара, подачу сигнала о завершении работы. При этом используют роботизированный комплекс, оснащенный набором сменных насадок манипулятора в виде инструментов для очистки/мойки и взаимодействия со сливным и/или заправочным узлами, а открывание и закрывание горловины резервуара осуществляют с использованием соответствующей насадки, причем перед открыванием соответствующей горловины резервуара производят очистку резервуара с использованием насадки манипулятора для очистки/мойки. Использование изобретения позволяет расширить технологические возможности комплекса и повысить качество обслуживания. 2 н. и 16 з.п. ф-лы, 2 ил.
1. Способ слива и налива резервуаров железнодорожного подвижного состава, включающий в себя следующие этапы:
- размещение роботизированного комплекса для слива и налива резервуаров железнодорожного подвижного состава возле путей остановки обслуживаемой единицы железнодорожного подвижного состава в пределах рабочего пространства робота упомянутого комплекса,
- определение местоположения обслуживаемой единицы подвижного состава, необходимого для начала обслуживания с передачей информации в модуль управления робота упомянутого комплекса,
- подача сигнала о начале работы,
- определение с помощью модуля технического зрения местоположения горловины резервуара единицы подвижного состава,
- открывание с помощью манипулятора упомянутого робота горловины резервуара обслуживаемой единицы подвижного состава, при этом для слива жидкости открывают сливную горловину резервуара, а для залива жидкости – заливную горловину резервуара,
- осуществление слива или налива резервуара,
- закрывание с помощью манипулятора упомянутого робота горловины резервуара обслуживаемой единицы подвижного состава,
- подача сигнала о завершении работы,
отличающийся тем, что
используют роботизированный комплекс, оснащенный набором сменных насадок манипулятора в виде инструментов для очистки/мойки и взаимодействия со сливным и/или заправочным узлами, при этом упомянутые открывание и закрывание горловины резервуара осуществляют с использованием соответствующей насадки, а перед открыванием соответствующей горловины резервуара производят очистку резервуара с использованием насадки манипулятора для очистки/мойки.
2. Роботизированный комплекс для слива и налива резервуаров железнодорожного подвижного состава, содержащий корпус, промышленный интеллектуальный робот, смонтированный внутри корпуса и включающий в себя манипулятор и модуль управления, при этом манипулятор робота выполнен в виде механической руки из шарнирно соединенных между собой звеньев, модуль технического зрения, смонтированный на манипуляторе, резервуары с трубопроводами и средства для определения местоположения обслуживаемой единицы подвижного состава, отличающийся тем, что он снабжен набором сменных насадок в виде инструментов для очистки/мойки и взаимодействия со сливным и/или заправочным узлами обслуживаемой единицы подвижного состава и соединения их трубопроводами с резервуарами комплекса, при этом каждая из насадок размещена в своем гнезде на держателе внутри корпуса, положение каждого гнезда запрограммировано в модуле управления с возможностью программируемого изъятия манипулятором робота требуемой насадки для выполнения соответствующей операции и возврата насадки в свое гнездо держателя после окончания операции, а боковая стенка корпуса со стороны расположения обслуживаемой единицы подвижного состава выполнена с проемом.
3. Комплекс по п. 2, отличающийся тем, что корпус выполнен в виде нижнего основания, боковых стенок и крыши или в виде контейнера.
4. Комплекс по п. 2, отличающийся тем, что корпус снабжен проушинами с возможностью зацепления с ними крюков подъемного механизма или основание корпуса выполнено в виде поддона с возможностью взаимодействия с вилами погрузчика.
5. Комплекс по п. 2, отличающийся тем, что корпус выполнен с возможностью установки на шасси транспортного средства, в том числе отдельного вагона или платформы, с возможностью передвижения по железнодорожным путям.
6. Комплекс по п. 2, отличающийся тем, что проем в корпусе снабжен сдвижной дверью или подъемными воротами.
7. Комплекс по п. 2, отличающийся тем, что при размещении комплекса между железнодорожными путями проемы выполнены в двух боковых стенках корпуса с его противоположных сторон, обращенных к обоим железнодорожным путям.
8. Комплекс по п. 2, отличающийся тем, что манипулятор робота выполнен по меньшей мере c пятью степенями свободы.
9. Комплекс по п. 2, отличающийся тем, что модуль технического зрения манипулятора выполнен в виде сенсорных датчиков, цифровой камеры, считывателей RFID-меток, QR-кодов, штрих-кодов.
10. Комплекс по п. 2, отличающийся тем, что модуль управления выполнен с возможностью подключения пульта дистанционного управления.
11. Комплекс по п. 2, отличающийся тем, что модуль управления оснащен экраном для интерфейсного взаимодействия с пользователем.
12. Комплекс по п. 2, отличающийся тем, что средства для определения местоположения обслуживаемой единицы подвижного состава выполнены в виде индуктивных датчиков, при этом один из датчиков смонтирован на уровне колесной тележки, а второй смонтирован на расстоянии от первого, соответствующем расстоянию от колесной тележки до середины отрезка, соответствующего расстоянию между соседними крайними колесными тележками двух соседних единиц.
13. Комплекс по п. 2, отличающийся тем, что средства для определения местоположения обслуживаемой единицы подвижного состава выполнены в виде видеокамеры, смонтированной на боковой стенке корпуса, обращенной к обслуживаемой единице.
14. Комплекс по п. 2, отличающийся тем, что набор сменных насадок содержит инструмент для очистки/мойки в виде пистолета высокого давления или распылительной форсунки, сообщенных трубопроводом с резервуаром с водой для очистки узлов единицы подвижного состава.
15. Комплекс по п. 2, отличающийся тем, что набор сменных насадок содержит инструмент в виде захвата для открывания/закрывания горловины резервуара обслуживаемой единицы подвижного состава.
16. Комплекс по п. 2, отличающийся тем, что набор сменных насадок содержит инструмент, выполненный с возможностью одновременного открывания горловины резервуара и сообщения посредством трубопровода резервуара единицы подвижного состава с резервуаром комплекса.
17. Комплекс по п. 2, отличающийся тем, что он снабжен насосами для принудительной откачки/подачи жидкости и подачи воздуха, соединенными с трубопроводами резервуаров комплекса.
18. Комплекс по п. 2, отличающийся тем, что резервуары комплекса смонтированы внутри корпуса или снаружи.
| CN 112644525 A, 13.04.2021 | |||
| СПОСОБ ОЧИСТКИ РЕЗЕРВУАРА ОТ ОТЛОЖЕНИЙ | 2020 |
|
RU2729673C2 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА С НЕСКОЛЬКИМИ СМЕННЫМИ РАБОЧИМИ МОДУЛЯМИ И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 2006 |
|
RU2313442C1 |
| 0 |
|
SU213533A1 | |
| CN 216988870 U, 19.07.2022. | |||

