fut 1
Изобретение относится к балансировочной технике и может быть использовано для балансировки малогабаритных роторов лучом лазера.
Цель изобретения - повышение точности, производительности и качества путем сжигания продуктов эрозии в окисляющем газе.
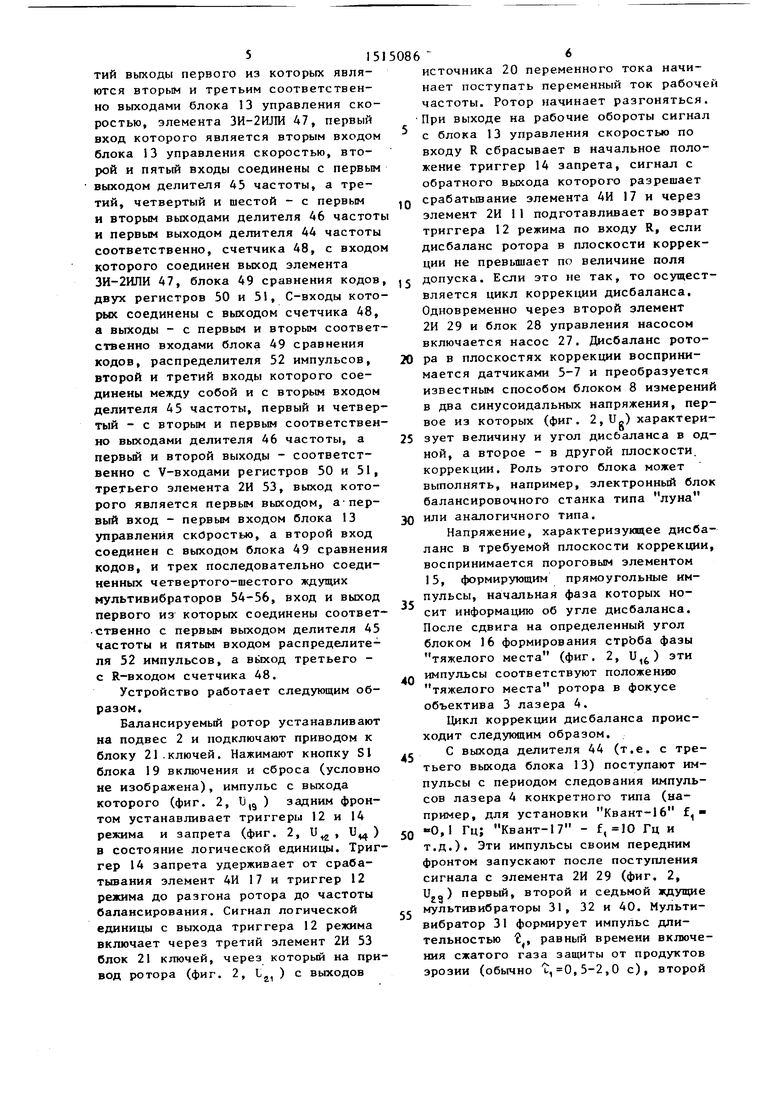
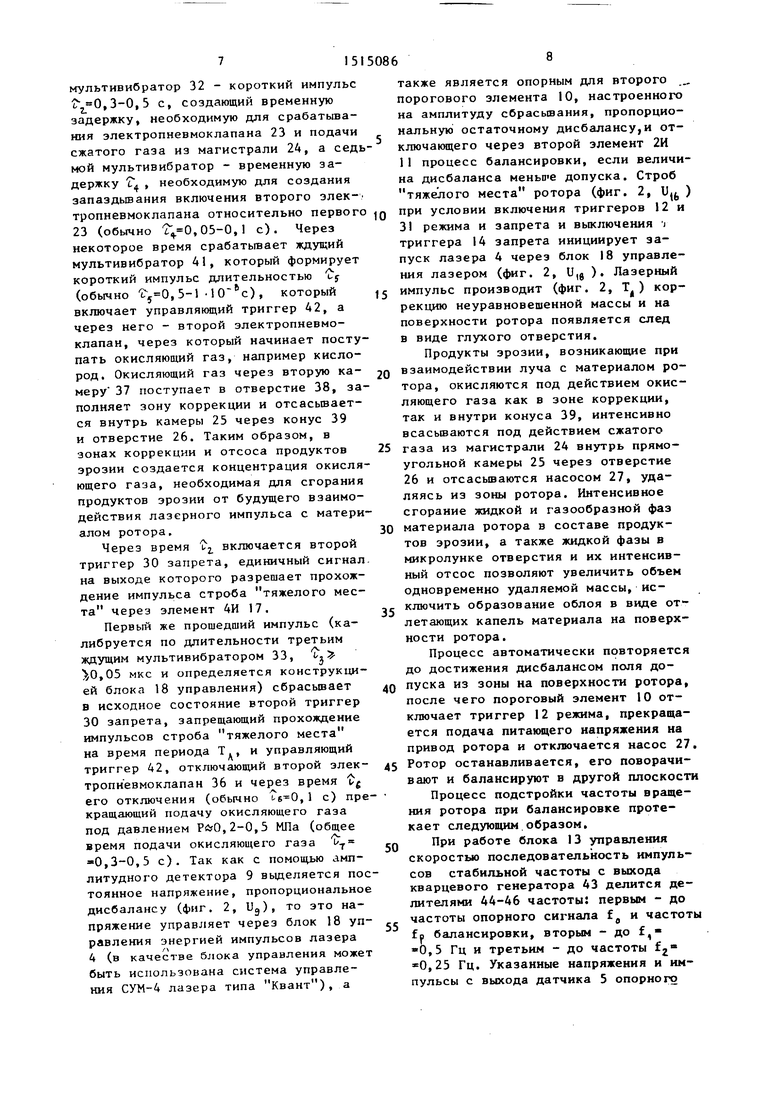
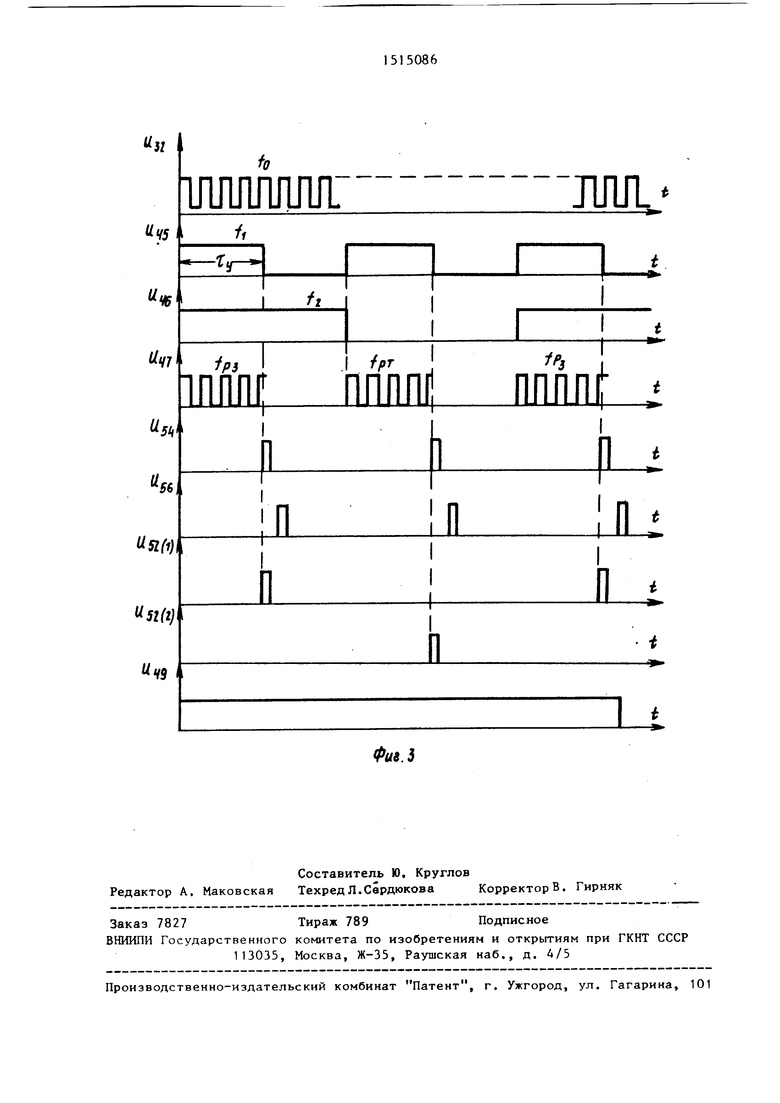
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - осциллограммы работы устройства; на фиг.З осциллограммы работы блока управления скоростью ротора.
Устройство содержит основание 1, подвес 2, в котором устанавливается ротор с приводом, расположенные соос но фокусирующий объектив 3 и корректирующий лазер 4, датчик 5 опорного сигнала и датчики 6 и 7 дисбаланса, механически связанные с подвесом 2, соединенный с датчиками 5-7 блок 8 измерений, последовательно соединенные амплитудный детектор 9, пороговый элемент 10, элемент 2И 11, соединенный с R-входом триггера 12 режима, блок 13 управления скоростью, второй-вход которого соединен с выходом датчика 5 опорного сигнала, соединенный также с R-входом триггера 14 запрета, обратный выход которого связан с вторым входом элемента 2И 11, последовательно соединенные второй пороговый элемент 15, связанный входом с выходом блока В измерений, блок 16 формир чания строба фазы тяжелого места, второй вход которого соединен с вторым выходом блока 13 управления скоростью, и элемент 4И 17, второй и третий входы которого соединены соответственно с выходом триггера 12 режима и обратным выходом триггера 14 запрета, блок 18 управления лазером, выход которого связан с лазером 4, а первый вход подключен к выходу амплитудного детектора 9, блок 19 включения и сброса, выход которого связан с соединенными между собой S-Bходами триггеров 12 и 14 режима и запрета, источник 20 переменного тока и связанный с ним сигнальным входом блок 21 ключей, выход которого соединен с входом привода ротора, а управляющий вход - с первым выходом блока 13 управления скоростью, систему 22 удаления продуктов эрозии, выполненную в виде последовательно соединенных электропневмоклапана 23, предназна
5
0
5
0
5
0
5
0
5
ченного для соединения с пневмомаги- стралью 24 высокого давления, камеры 25 с отверстиями 26, расположенными соосно герметично закрепленному на камере 25 фокусирующему объективу 3 и перпендикулярно оси камеры 25, насоса 27, предназначенного для удаления продуктов эрозии, блока 28 управления насосом, выход которого соел динен с входом насоса 27, второго элемента 2И 29, входы которого соединены соответственно с выходом триггера 12 режима и обратным выходом триггера 14 запрета, а выход - с входом блока 28 управления насосом, второго триггера 30 запрета, выход которого соединен с четвертым входом элемента 4И 17, трех ждущих мультивибраторов 31-33, выходы которых соединены соответственно с входом элект ропневмоклапана 24, S-входом второго триггера 30 запрета и соединенными между собой R-входом триггера 30 запрета и вторым входом блока 18 управления лазером, управляющие входы ждущих мультивибраторов 31 и 32 соединены между собой и с выходом второго элемента 2И 29, сигнальные входы - с третьим выходом блока 13 управления скоростью, а вход ждущего мультивибратора 33 - с выходом элемента 4И 17, систему 34 подачи окисляющего газа, выполненную в виде последовательно соединенных пневмомагистрали 35 окисляющего газа, второго электропневмоклапана 36 и коаксиальной первой второй камеры 37 с отверстием 38, соосным выходному отверстию 26 и большим по диаметру, чем выходное отверстие 26, защитный конус 39, размещенный в отверстиях 26 и 38 камер 25 и 37, и последовательно соединенные первый дополнительный ждущий мультивибратор 40, входы которого соединены с выходом второго элемента 2И 29 и третьим выходом блока 13 управления скоростью, второй дополнительный ждущий мультивибратор 41, соединенный с S-входом управляющего триггера 42, R-вход которого соединен с выходом третьего ждущего мультивибратора 33, а выход - с управляющим входом второго электропневмоклапана.
Блок 13 управления скоростью вы-i полнен в виде последовательно соединенных кварцевого генератора 43, делителей 44-46 частоты, второй и тре515
тий выходы первого из которых являются вторым и третьим соответственно выходами блока 13 управления скоростью, элемента ЗИ-2ИЛИ 47, первый вход которого является вторым входом блока 13 управления скоростью, второй и пятый входы соединены с первым выходом делителя 45 частоты, а третий, четвертый и шестой - с первым и вторым выходами делителя А6 частот и первым выходом делителя АА частоты соответственно, счетчика А8, с входо которого соединен выход элемента ЗИ-2ИПИ А7, блока А9 сравнения кодов двух регистров 50 и 51, С-входы которых соединены с выходом счетчика А8, а выходы - с первым и вторым соответственно входами блока А9 сравнения кодов, распределителя 52 импульсов, второй и третий входы которого соединены между собой и с вторым входом делителя А5 частоты, первый и четвертый - с вторым и первым соответственно выходами делителя А6 частоты, а первый и второй выходы - соответственно с V-входами регистров 50 и 51, третьего элемента 2И 53, выход которого является первым выходом, а-первый вход - первым входом блока 13 управления скоростью, а второй вход соединен с выходом блока А9 сравнения кодов, и трех последовательно соединенных четвертого-шестого ждущих мультнвибраторов 5А-56, вход и выход первого из которых соединены соответ- ственно с первым выходом делителя А5 частоты и пятым входом распределителя 52 импульсов, а вьгход третьего - с R-входом счетчика А8.
Устройство работает следующим образом.
Балансируемый ротор устанавливают на подвес 2 и подключают приводом к блоку 21.ключей. Нажимают кнопку SI блока 19 включения и сброса (условно не изображена), импульс с выхода которого (фиг. 2, Ujj ) задним фронтом устанавливает триггеры 12 и 1А режима и запрета (фиг. 2, U U ) в состояние логической единицы. Триггер 1А запрета удерживает от срабатывания элемент АИ 17 и триггер 12 режима до разгона ротора до частоты балансирования. Сигнал логической единицы с выхода триггера 12 режима включает через третий элемент 2И 53 блок 21 ключей, через который на привод ротора (фиг. 2, Ijj, ) с выходов
086 6
источника 20 переменного тока начинает поступать переменный ток рабочей частоты. Ротор начинает разгоняться. При выходе на рабочие обороты сигнал с блока 13 управления скоростью по входу R сбрасывает в начальное положение триггер 1А запрета, сигнал с обратного вьсхода которого разрешает Q срабатьюание элемента АИ 17 н через элемент 2И 11 подготавливает возврат триггера 12 режима по входу R, если дисбаланс ротора в плоскости коррекции не превьпиает по величине поля jr допуска. Если это не так, то осуществляется цикл коррекции дисбаланса. Одновременно через второй элемент 2И 29 и блок 28 управления насосом включается насос 27. Дисбаланс рото- 20 ра в плоскостях коррекции воспринимается датчиками 5-7 и преобразуется известным способом блоком 8 измерений в два синусоидальных напряжения, первое из которых (фиг. 2, U-) характерио
25 зует величину и угол дисбаланса в одной, а второе - в другой плоскости, коррекции. Роль этого блока может выполнять, например, электронный блок балансировочного станка типа луна 30 или аналогичного типа.
Напряжение, характеризующее дисбаланс в требуемой плоскости коррекции, воспринимается пороговым элементом 15, формирующим прямоугольные импульсы, начальная фаза которых носит информацию об угле дисбаланса. После сдвига на определенный угол блоком 16 формирования стрЬба фазы тяжелого места (фиг. 2, U,) эти импульсы соответствуют положению тяжелого места ротора в фокусе объектива 3 лазера А.
Цикл коррекции дисбаланса происходит следующим образом.
С выхода делителя АА (т.е. с третьего вькода блока 13) поступают импульсы с периодом следования импульсов лазера А конкретного типа (например, для установки Квант-16 f 0 «0,1 Гц; Квант-17 - f, 10 Гц и т.д.). Эти импульсы своим передним фронтом запускают после поступления сигнала с элемента 2И 29 (фиг. 2, U-) первый, второй и седьмой ждущие , мультивибраторы 31, 32 и АО. Мультивибратор 31 формирует импульс длительностью , равный времени включения сжатого газа защиты от продуктов эрозии (обычно L, 0,5-2,0 с), второй
5
0
5
мультивибратор 32 - короткий импульс ,3-0, 5 с, создающий временную задержку, необходимую для срабатьша- ния электропневмоклапана 23 и подачи сжатого газа из магистрали 24, а седмой мультивибратор - временную задержку Г , необходимую для создания запаздывания включения второго электропневмоклапана относительно первог 23 (обычно ,0,05-0,1 с). Через некоторое время срабатьшает ждущий мультивибратор 41, который формирует короткий импульс длительностью C j (обычно ,5-l -Ю с), который включает управляющий триггер 42, а через него - второй электропневмо- клапан, через который начинает поступать окисляющий газ, например кислород. Окисляющий газ через вторую ка- меру 37 поступает в отверстие 38, заполняет зону коррекции и отсасьюает- ся внутрь камеры 25 через конус 39 и отверстие 26. Таким образом, в зонах коррекции и отсоса продуктов эрозии создается концентрация окисляющего газа, необходимая для сгорания продуктов эрозии от будущего взаимодействия лазерного импульса с материалом ротора.
Через время и включается второй триггер 30 запрета, единичный сигнал на выходе которого разрешает прохождение импульса строба тяжелого места через элемент 4И 17.
Первый же прошедший импульс (калибруется по длительности третьим ждущим мультивибратором 33, I j 0,05 МКС и определяется конструкцией блока 18 управления) сбрасьшает в исходное состояние второй триггер 30 запрета, запрещающий прохождение импульсов строба тяжелого места на время периода Т., и управляющий триггер 42, отключающий второй элек- тропн евмоклапан 36 и через время и его отключения (обьнно ,1 с) пре кращающий подачу окисляющего газа под давлением ,2-0,5 МПа (общее время подачи окисляющего газа I Y 0,3-0,5 с). Так как с помощью амплитудного детектора 9 выделяется постоянное напряжение, пропорциональное дисбалансу (фиг. 2, Ug), то это напряжение управляет через блок 18 уп- равления энергией импульсов лазера 4 (в качестве блока управления может быть использована система управления СУМ-4 лазера типа Квант), а
также является опорным для второго порогового элемента 10, настроенного на амплитуду сбрасьшания, пропорциональную остаточному дисбалансу,и отключающего через второй элемент 2И 11 процесс балансировки, если величина дисбаланса меньп е допуска. Строб тяжелого места ротора (фиг. 2, I),. при условии включения триггеров 12 и 31 режима и запрета и выключения триггера 14 запрета инициирует запуск лазера 4 через блок 18 управления лазером (фиг. 2, U,g ). Лазерный импульс производит (фиг. 2, Т ) коррекцию неуравновещенной массы и на поверхности ротора появляется след в виде глухого отверстия.
Продукты эрозии, возникающие при взаимодействии луча с материалом ротора, окисляются под действием окисляющего газа как в зоне коррекции, так и внутри конуса 39, интенсивно всасьшаются под действием сжатого газа из магистрали 24 внутрь прямоугольной камеры 25 через отверстие 26 и отсасьшаются насосом 27, удаляясь из зоны ротора. Интенсивное сгорание жидкой и газообразной фаз материала ротора в составе продуктов эрозии, а также жидкой фазы в микролуике отверстия и их интенсивный отсос позволяют увеличить объем одновременно удаляемой массы, исключить образование облоя в виде отлетающих капель материала на поверхности ротора.
Процесс автоматически повторяется до достижения дисбалансом поля допуска из зоны на поверхности ротора, после чего пороговый элемент 10 отключает триггер 12 режима, прекращается подача питающего напряжения на привод ротора и отключается насос 27 Ротор останавливается, его поворачивают и балансируют в другой плоскост
Процесс подстройки частоты вращения ротора при балансировке протекает следующим образом.
При работе блока 13 управления скоростью последовательность импульсов стабильной частоты с выхода кварцевого генератора 43 делится делителями 44-46 частоты: первым - до частоты опорного сигнала f и частот fj) балансировки, вторым - до ,« 0,5 Гц и третьим - до частоты f 0,25 Гц. Указанные напряжения и импульсы с выхода датчика 5 опорного
сигнала ротора коммутируются элементом ЗИ-2ИЛИ 47 в последовательность пачек импульсов длительностью t 1 каждая,содержащих четные импульсы с частотой f
Рг
а нечетные - частотой fp вращения, и несут информацию о текущем и заданном значениях частоты вращения ротора. Эти импульсы записьюаются счетчиком 48, предварительно сбрасываемым в нулевое положение импульсами с частотой f, выхода шестого ждущего мультивибратора 56.Параллельные коды, соответствующие заданной fpj и текущей ffu. частотам вращения ротора,последовательно записьюаются регистрами 50 и 51 по импульсам с выходов распределителя 52 импульсов, причем последний вьщает импульсы частотой f., сдвинутые один относительно другого на половину периода (фиг. 3, Uj., Uj . - ). Это необходимо для того, чтобы записьшать в регистре 50 код, соответствующий заданной частоте вращения ротора,- и в регистре 51 - текущей частоте вращения ротора. Коды выходов регистров 50 и 51 сравниваются блоком 49 сравнения кодов, так что сигнал, на его выходе равен логической единице при fp fp и логическому нулю, если наоборот. Этот сигнал через третий элемент 2И 53 и блок 21 ключей управляет приводом ротора, а следовательно, его скоростью, а также первым перепадом отключает триггер 14 запрета.
Наличие в устройстве системы подачи активного окисляющего газа в зо,ну обработки, а также элементов, осу- ществляющих синхронную работу этой системы, позволяет повысить точность, производительность и качество следов на поверхности ротора за счет сжигания жидкой или газообразной фаз продуктов эрозии, возникающих при лазерной коррекции дисбалансов, в атмосфе- Q ре сжатого активного окисляющего газа.
Формула изобретения
Устройство для динамической балан5 сировки роторов лучом лазера по авт. св. № 1226091, отличающееся тем, что, с целью повышения точности, производительности и качества балансировки, оно снабжено снстемой подачи
Q окисляющего газа, выполненной в виде последовательно соединенных пневмо- магистрали окисляющего газа, второго электропневмоклапана и коаксиальной первой второй камеры с отверстием,
5 соосным с отверстием первой камеры и большим по диаметру, защитнь1м конусом, размещенным в отверстиях камер, и последовательно соединенными первым дополнительным ждущим мульти0 вибратором, входы которого соединены с выходом второго элемента 2И. и третьим выходом блока управления скоростью, вторым дополнительным ждущим мультивибратором и соединенным
5 S-входом управляющим триггером,
R-вход которого соединен с выходом третьего ждущего мультивибратора, а выход - с управляющим входом второго электропневмоклапана.
и I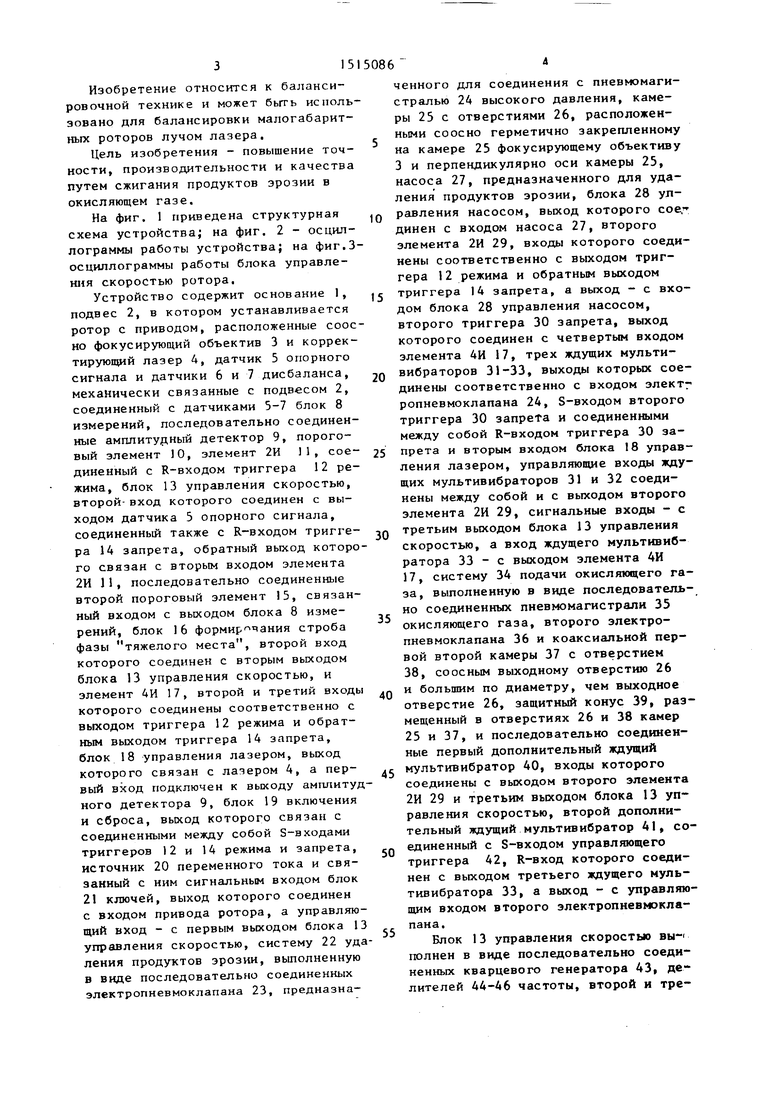
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Импульсный измерительный дефектоскоп | 1990 |
|
SU1777068A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Преобразователь угол-код | 1982 |
|
SU1064288A1 |

Изобретение относится к балансировочной технике и является усовершенствованием изобретения по авт.св. N 1226091. Цель изобретения - повышение точности, производительности и качества балансировки за счет сжигания продуктов эрозии в активном окисляющем газе. Окисляющий газ через пневмомагистраль 35 и второй электропневмоклапан 36, управляемый управляющим триггером 42, подается во вторую камеру 37, где происходит окисление продуктов эрозии, выделившихся при коррекции лучом лазера 4. Окисленные продукты эрозии через конус 39 и отверстие 26 всасываются внутрь камеры 25, откуда удаляются насосом 27. Процесс синхронизируется последовательно соединенными ждущими мультивибраторами 40 и 41. 3 ил.
Фи.
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
