Изобретение касается программирующего устройства для манипулятора.
Цель изобретения - повышение точности измерений для программирования перемещений в проходящем перпендикулярно продольной оси средней части устройства осевом направлении.
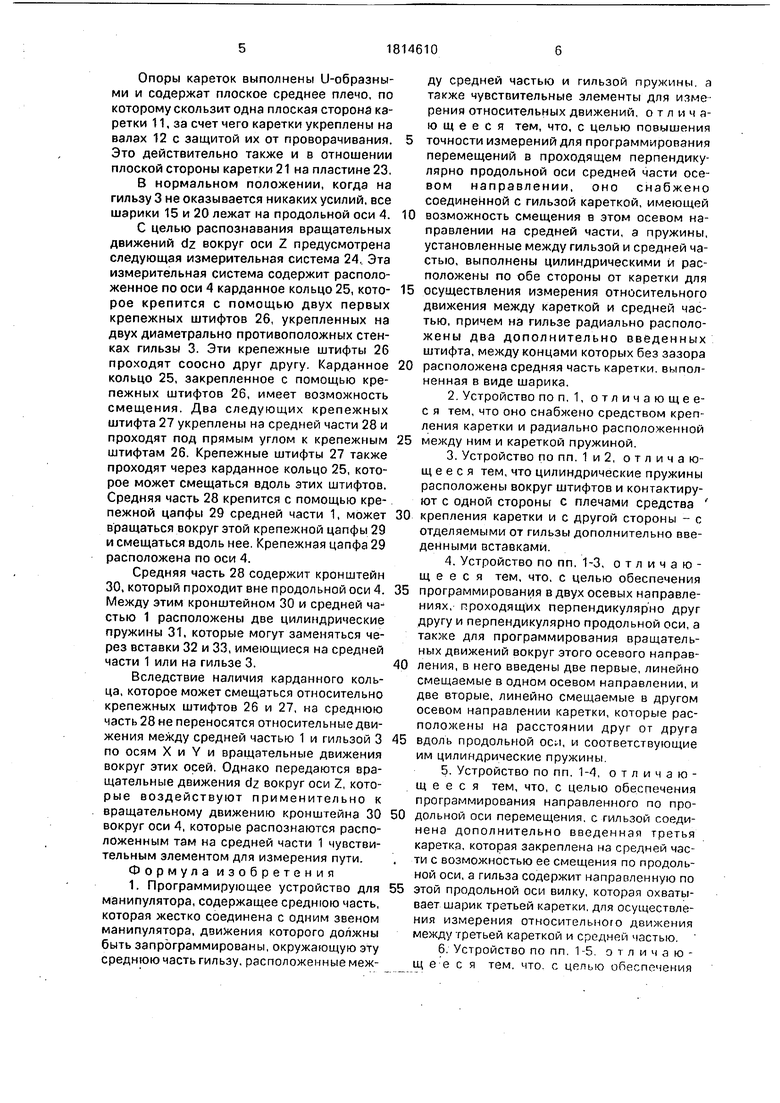
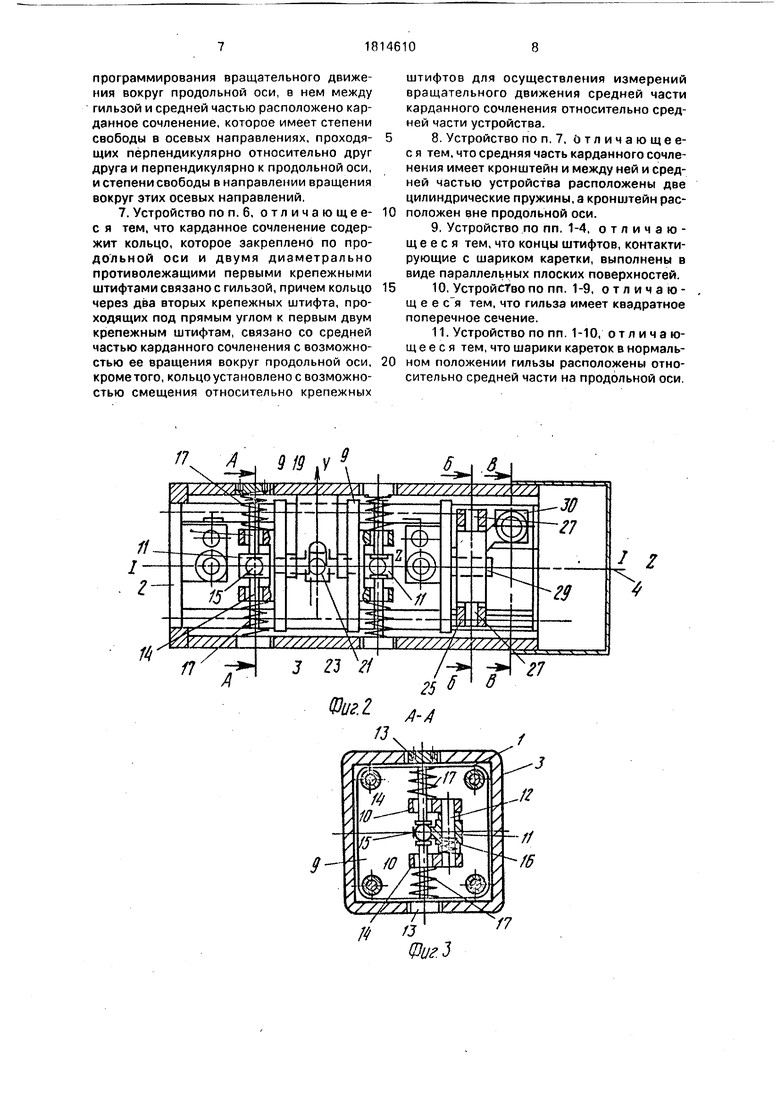
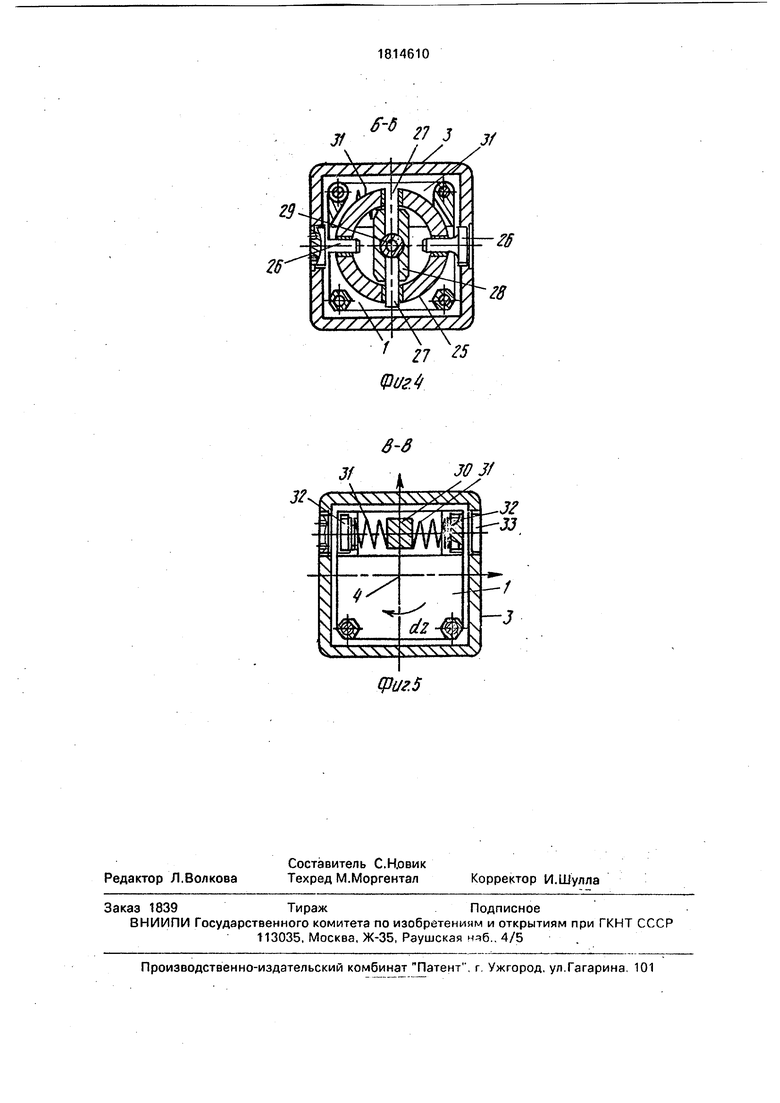
На фиг. 1 изображено продольное сечение программирующего устройства; на фиг. 2 - продольное сечение через программирующее устройство вдоль линии II-II на фиг. 1; на фиг. 3 - сечение А-А на фиг, 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг, 2.
Программирующее устройство содержит среднюю часть 1, которая через присоединительную пластину 2 может быть неподвижно соединена с подлежащим программированию зоеном манипулирующего устройства. Средняя часть 1 окружена гильзой 3, которая имеет квадратное поперечное сечение. Средняя часть 1 содержит одну продольную ось 4.
С помощью программирующего устройства в соответствии с примером исполнения могут программироваться относительные движения между средней частью 1 и гильзой 3 в направлении осей X, Y и Z, а также вращательные движения dx, dv и dz вокруг этих осей, причем оси X и Y проходят под прямым углом друг к другу и к оси Z, a последняя совпадает с продольной осью 4 средней части 1.
Для программирования движений в направлении оси X для программирования вращательных движений dv служат измерительные системы 5 и 6, расположенные на расстоянии друг от друга вдоль оси 4. Для программирования движений в направлении оси Y и вращательных движений dx служат измерительные системы 7 и 8, которые также расположены на расстоянии друг от друга вдоль оси 4. Измерительные системы 7 и 8 располагаются смещенными на 90° вокруг оси 4 относительно измерительных систем 5 и 6. Измерительные системы 5-8 являются идентичными и их конструкция поясняется на основании фиг. 3.
Гильза 3 охватывает с зазором среднюю часть 1, На плате 9 средней части, которая проходит поперечно оси 4,. расположены два плеча 10 средства крепления (опоры) каретки 11t между которыми проходит вал
12. На валу 12 с возможностью смещения укреплена каретка 11. В гильзу 3 во взаимно противолежащие стенки ввинчены вставки
13. несущие по одному штифту 14, которые проходят в направлении продольной оси 4. Концы штифтов 14 содержат плоскопараллельные поверхности, между которыми по
возможности без зазора расположен шарик 15 каретки 11. Поскольку абсолютного отсутствия люфта достичь невозможно, на валу 12 располагается цилиндрическая
пружина 16, которая опирается с одной стороны о каретку 11, а с другой стороны - на одно из плеч 10. Штифты 14 окружены спиральными пружинами 17, которые опираются с одной стороны на гильзу 3, а с другой
стороны-на плечо 10. В случае приложения усилия к гильзе 3 в направлении оси Y или против этого направления осуществляется линейное смещение каретки 11 по штифтам 14. На части 1 расположен чувствительный
5 элемент (не показан) для измерения пути, который измеряет относительное движение между кареткой 11 и платой 9, а затем преобразует его в электрические сигналы. Плечи 10 средства крепления каретки
0 11 содержат отверстия, через которые проходят штифты 14. Поскольку вставки 13 могут вывинчиваться, то существует возможность замены цилиндрических пружин 17 пружинами с более крутой или более
5 пологой характеристикой.
При относительных движениях между средней частью 1 и гильзой 3 в направлении оси X каретки 11 измерительных систем 5 и 6 смещаются в том же направлении. При
0 вращательных движениях dv вокруг оси Y левая и правая каретки 11 смещаются в противоположных направлениях. То же справедливо и в отношении кареток 11 измерительных систем 7 и 8 при их линей5 ном движении в направлении оси Y или при вращательном движении dx вокруг оси X. Движения всех кареток 11 распознаются с . помощью чувствительных элементов для измерения пути.
0
Между измерительными системами 7 и 8 располагается следующая измерительная система 18, которая служит для распознавания относительных движений между гиль5 зой 3 и средней частью 1 в направлении оси 7. Эта измерительная система 18 имеет вилку 19, которая укреплена на гильзе 3. Эта вилка простирается во внутрь до продольной оси 4. Вилка 19 содержит шарик 20 каретки
0 21, которая укреплена на проходящем параллельно продольной оси 4 валу 22, проходящем между соседними платами 9. При относительном движении средней части 1 и гильзы 3 в направлении оси Z или против
5 этого направления осуществляется линейное смещение каретки 21. На пластине 23 системы 18 также располагается чувствительный элемент для измерения пути (не показан), который распознает движения каретки 21 относительно этой пластины.
Опоры кареток выполнены U-образны- ми и содержат плоское среднее плечо, по которому скользит одна плоская сторона каретки 11, за счет чего каретки укреплены на валах 12 с защитой их от проворачивания. Это действительно также и в отношении плоской стороны каретки 21 на пластине 23,
В нормальном положении, когда на гильзу 3 не оказывается никаких усилий, все шарики 15 и 20 лежат на продольной оси 4.
С целью распознавания вращательных движений dz вокруг оси Z предусмотрена следующая измерительная система 24, Эта измерительная система содержит расположенное по оси 4 карданное кольцо 25, кото- рое крепится с помощью двух первых крепежных штифтов 26, укрепленных на двух диаметрально противоположных стенках гильзы 3. Эти крепежные штифты 26 проходят соосно друг другу. Карданное кольцо 25, закрепленное с помощью крепежных штифтов 26, имеет возможность смещения. Два следующих крепежных штифта 27 укреплены на средней части 28 и проходят под прямым углом к крепежным штифтам 26. Крепежные штифты 27 также проходят через карданное кольцо 25, которое может смещаться вдоль этих штифтов. Средняя часть 28 крепится с помощью крепежной цапфы 29 средней части 1, может вращаться вокруг этой крепежной цапфы 29 и смещаться вдоль нее. Крепежная цапфа 29 расположена по оси 4.
Средняя часть 28 содержит кронштейн 30, который проходит вне продольной оси 4. Между этим кронштейном 30 и средней ча- стью 1 расположены две цилиндрические пружины 31, которые могут заменяться через вставки 32 и 33, имеющиеся на средней части 1 или на гильзе 3.
Вследствие наличия карданного кольца, которое может смещаться относительно крепежных штифтов 26 и 27, на среднюю часть 28 не переносятся относительные движения между средней частью 1 и гильзой 3 по осям X и Y и вращательные движения вокруг этих осей. Однако передаются вращательные движения dz вокруг оси Z, которые воздействуют применительно к вращательному движению кронштейна 30 вокруг оси 4, которые распознаются расположенным там на средней части 1 чувствительным элементом для измерения пути.
Формула изобретения
1. Программирующее устройство для манипулятора, содержащее среднюю часть, которая жестко соединена с одним звеном манипулятора, движения которого должны быть запрограммированы, окружающую эту среднюю часть гильзу, расположенные между средней частью и гильзой пружины, а также чувствительные элементы для измерения относительных движений, отличающееся тем, что, с целью повышения точности измерений для программирования перемещений в проходящем перпендикулярно продольной оси средней части осевом направлении, оно снабжено соединенной с гильзой кареткой, имеющей возможность смещения в этом осевом направлении на средней части, а пружины, установленные между гильзой и средней частью, выполнены цилиндрическими и расположены по обе стороны от каретки для осуществления измерения относительного движения между кареткой и средней частью, причем на гильзе радиально расположены два дополнительно введенных штифта, между концами которых без зазора расположена средняя часть каретки, выполненная в виде шарика.
2. Устройство по п. 1, отличающее- с я тем, что оно снабжено средством крепления каретки и радиально расположенной между ним и кареткой пружиной.
3. Устройство по пп. 1 и 2, отличающееся тем, что цилиндрические пружины расположены вокруг штифтов и контактируют с одной стороны с плечами средства крепления каретки и с другой стороны - с отделяемыми от гильзы дополнительно введенными вставками.
4. Устройство по пп. 1-3, отличающееся тем, что, с целью обеспечения программирования в двух осевых направлениях, проходящих перпендикулярно друг другу и перпендикулярно продольной оси, а также для программирования вращательных движений вокруг этого осевого направления, в него введены две первые, линейно смещаемые в одном осевом направлении, и две вторые, линейно смещаемые в другом осевом направлении каретки, которые расположены на расстоянии друг от друга вдоль продольной оси, и соответствующие им цилиндрические пружины.
5. Устройство по пп. 1-4, отличающееся тем, что, с целью обеспечения программирования направленного по продольной оси перемещения, с-гильзой соединена дополнительно введенная третья каретка, которая закреплена на средней части с возможностью ее смещения по продольной оси, а гильза содержит направленную по этой продольной оси вилку, которая охватывает шарик третьей каретки, для осуществления измерения относительного движения между третьей кареткой и средней частью.
6. Устройство по пп. 1-5. отличающее с я тем. что. с целью обеспечения
программирования вращательного движения вокруг продольной оси, в нем между гильзой и средней частью расположено карданное сочленение, которое имеет степени свободы в осевых направлениях, проходящих перпендикулярно относительно друг друга и перпендикулярно к продольной оси, и степени свободы в направлении вращения вокруг этих осевых направлений,
7. Устройство по п. 6, отличающее- с я тем, что карданное сочленение содержит кольцо, которое закреплено по продольной оси и двумя диаметрально противолежащими первыми крепежными штифтами связано с гильзой, причем кольцо через два вторых крепежных штифта, проходящих под прямым углом к первым двум крепежным штифтам, связано со средней частью карданного сочленения с возможностью ее вращения вокруг продольной оси, кроме того, кольцо установлено с возможностью смещения относительно крепежных
штифтов для осуществления измерений вращательного движения средней части карданного сочленения относительно средней части устройства.
8. Устройство по п. 7, отличающее- с я тем, что средняя часть карданного сочленения имеет кронштейн и между ней и средней частью устройства расположены две цилиндрические пружины, а кронштейн расположен вне продольной оси.
9, Устройство по пп. 1-4. отличающееся тем, что концы штифтов, контактирующие с шариком каретки, выполнены в виде параллельных плоских поверхностей.
10. Устройство по пп. 1-9, отличающее тем, что гильза имеет квадратное поперечное сечение.
11. Устройство по пп. 1-10, отличающееся тем, что шарики кареток в нормальном положении гильзы расположены относительно средней части на продольной оси,
77 t
3i fV . // х
Сущность изобретения: для программирования движений по координатным осям служат измерительные системы, расположенные на расстоянии друг от друга вдоль оси 4. Измерительные системы смещены на 90° вокруг этой оси, их конструкции идентичны. При относительных движениях средней части 1 и гильзы 3 смещаются каретки 11 измерительных систем 5 и 6 в том же направлении, а при вращательных движениях левая и правая каретки 11 смещаются в противоположных направлениях. 10 з.п. ф-лы. 5 ил.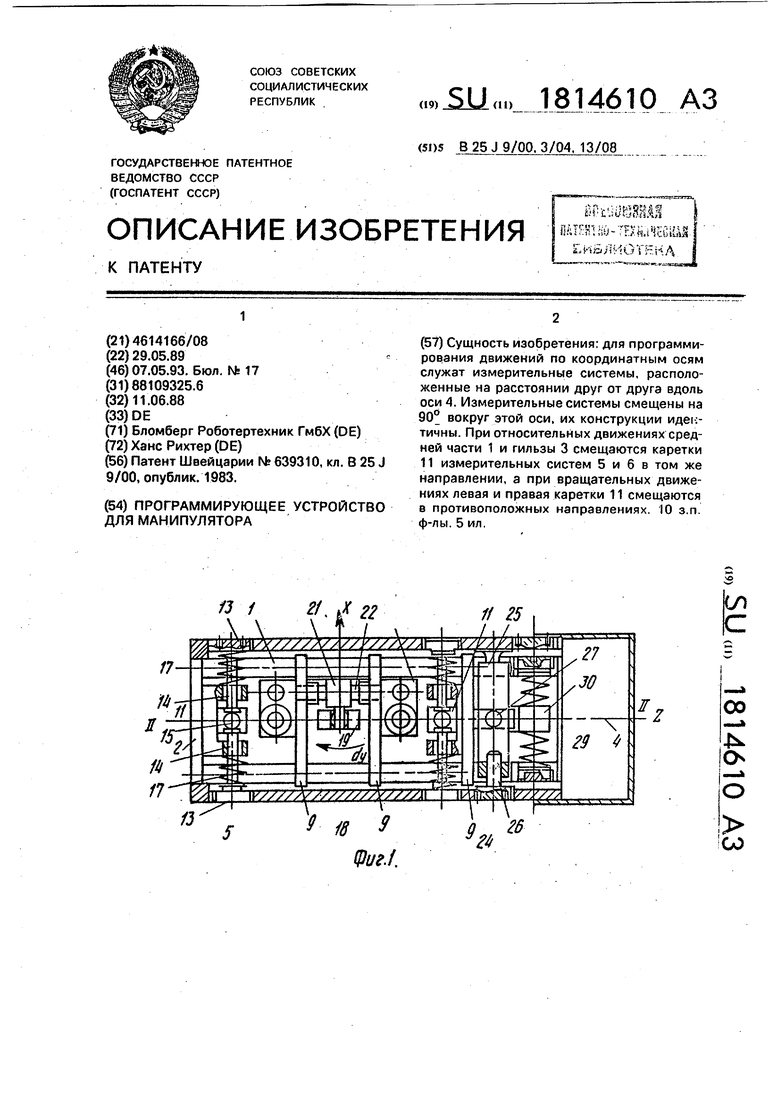
Фиг4
Фиг.5
| Патент Швейцарии N 639310, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
