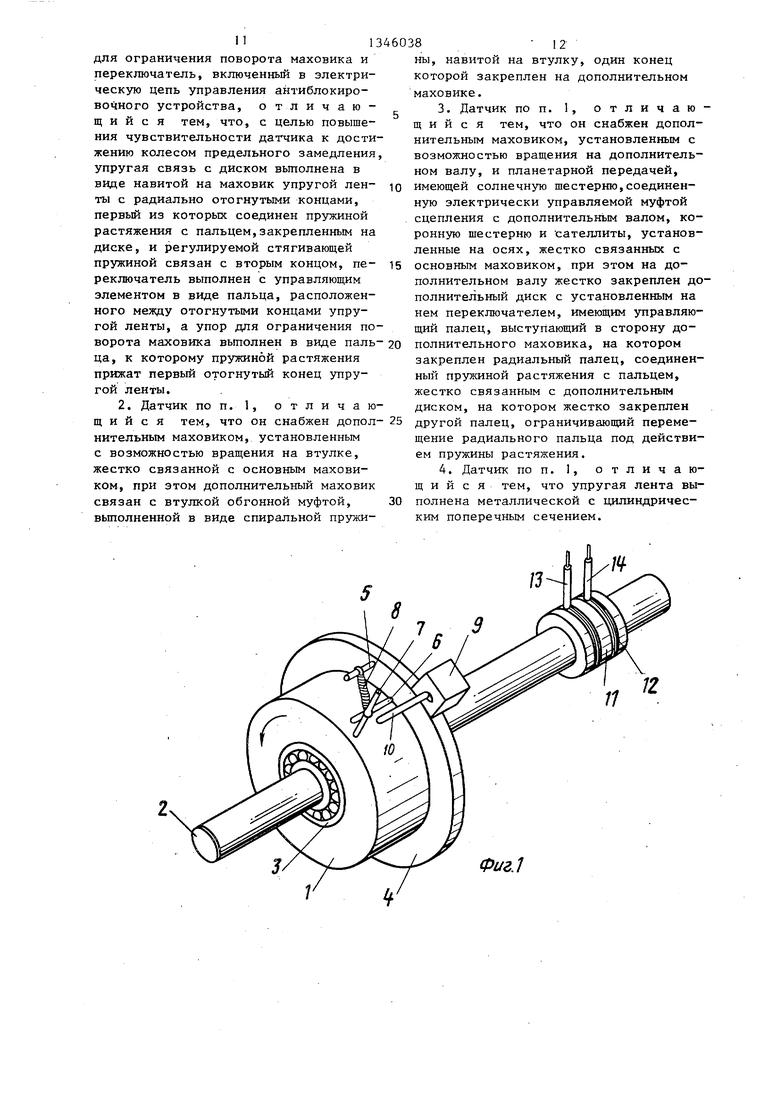
жины 8. Как показано на фиг. 1, пружина 8 начальной регулировки вставлена между-пальцем 7 на маховике 1 и пальцем 5 на диске 4 так, что стремится повернуть маховик I против часовой стрелки относительно вала 2 Гкак указано стрелкой) до тех пор, пока палец 7 на маховике 1 не подойдет к другому пальцу 6 на диске 4.
Датчик (фиг. 1) дополнительно включает средства, такие как микропереключатель 9, имеющий исполнитель- ньй рычаг 10, расположенный так, что- в втором положении; на фиг, бы контактировать при относительном
Изобретение относится к транспортному машиностроению.
Цeль изобретения - повышение чувствительности датчика.
На фиг. 1 изображен датчик замедления, общий вид; на фиг. 2 - то же, второй вариант, вид. с .торца; на . фиг. 3 - то же, модификация;на фиг. 4 - то же, -модификация; на фиг. 5 - то же, модификация; на фиг. 6 - датчик, третий вариант; на фиг. 7 - разрез А- А на фиг. 6; на фиг. 8 - датчик по фиг. 7 в первом положении; на фиг. 9- то же, то же, то же, фиг. фиг.
10
в третьем положении;на фиг.11 в четвертом положении; на 12 - модификация датчика по 6; на фиг. 13 - разрез Б-Б на
повороте диска 4 и маховика I с пальцем 7, установленным на маховике 1, тем самым вызывать относительный поворот маховика 1 в направлении часовой стрелки (в направлении, противофиг. 12; на фиг. 14 - модификация датчика по фиг. 6; на фиг. 15 - датчик, четвертьш вариант; на фиг. 16 - то же, пятьш вариант; на фиг. 17 - то же, модификация; на фиг. 18 - то же, модификация; на фиг. 19 - то же, мо- | дификация; на фиг. 20 -- то же, модификация; на фиг. 21 - датчик,шестой вариант; на фиг.22 - то же, седьмой вариант; на фиг. 23 - часть датчика
на фиг. 22; на фиг. 24 - вид части датчика, подобный фиг. 7.
Инерционный груз в форме, маховика 1 вращательно установлен на валу 2 с помощью соответствующих подшипников, например подшипников качения. Наружное кольцо 3 шарикоподшипника
жестко установлено в маховике 1,внут- реннееОего кольцо закреплено соответствующими средствами, например прессовой посадкой или-стопорными кольцами (не показаны), на валу 2. Примыкая к маховику 1, на валу 2 закреплен с возможностью вращения с этим валом
диск 4. В осевом направлении от диска 4 параллельно валу 2 и около поверхности окружности маховика 1 выступает пара пальцев 5 и 6. Из маховика в радиально.м направлении выходит палец 7. Зацепление двух пальцев 6 и 7 соответственно на диске 4 и маховике 1 ограничивает относительный поворот этого маховика 1 по отношению к диску 4 и валу 2. Для установки начального крутящего момента., требуемого для поворота диска 4 и маховика 1 относительно друг друга, между диском 4 и маховиком 1 действуют соответствующие смещающие средства, показанные в форме винтовой
10
Датчик (фиг. 1) дополнительно включает средства, такие как микропереключатель 9, имеющий исполнитель- ньй рычаг 10, расположенный так, что- бы контактировать при относительном
0
повороте диска 4 и маховика I с пальцем 7, установленным на маховике 1, тем самым вызывать относительный поворот маховика 1 в направлении часовой стрелки (в направлении, противо0
5
положном показанному стрелкой). Соответствующими проводниками микропереключатель 9 соединен со скользящими кольцами 11 и 12 и соответствующими
5 щетками 13 и 14 так, что микропереключатель- 9 может передавать соответ- cтвyющe ry тормозному модулятору (не показан) информацию, относящуюся к степени изменения угловых скоростей вала 2 и вращаемого элемента (колеса) , с которым соединен вал. Датчик на фиг. 2 отличается от датчика на фиг. 1 наличием коромысла 15 для ограничения относительных угловых положений, в которых связаны диск 16 и маховик 17. В частности коромысло 15 имеет идущий в ридиальном направлении к наружней стороне выступ 18, ко- торьй заключен между двумя пальцами 19 и 20, выступающими из диска 16 в осевом направлении. Кроме того, коромысло 15 и осевой палец 21, выходящий из маховика 17, соединены действующей в радиальном направлении g первоначально отрегулированной пружиной 22, которая удерживает коромь1сло в зацеплении с двумя осевыми канавками 23 и 24 в маховике 17. Выступающий из маховика 17 радиальный паQ лец 25 взаимодействует с парой микро переключателей 26 к 27 с тем, чтобы вырабатывать сигналы, указывающие на случае превьппения скорости как при ускорении, так и при торможении.
Датчик на фиг. 2 полностью симметричен. Следовательно, когда преодолевается установленный пружиной 22 пороговый момент вращения, коромысло 15 поднимается из соответствующих кана0
5
вок 23 и 24 в зависимости от направления относительного вращения диска 1 6 и маховика 17. В этом случае маховик 17 поворачивается относитель но диска 16, заставляя радиальный палец 25 замыкать один или другой микропереключатели 26 и 27.
Устройство на фиг. 3 подобно устройству на фиг. 2, но предусматрива- ет несимметричное коромысло 15, тем самым обеспечивается различие между степенью изменения, ускорения и степенью изменения торможения. Такая возможность различия допустимых поро- говых значений крутящего момента существенна в датчиках, используемых на автотранспортных средствах с тем чтобы скольжение колеса не достигало опасных значений во время торможе- ния, и чтобы не прилагались избыточные движущие моменты. В конкретном примере пассажирского автотранспорта целесообразное значение предельного момента кручения для датчика, сигнализирующего во время торможения например в два раза больше порогового значения момента вращения для датчика, сигнализирующего во время ускорения, частично за счет того, что во время торможения действуют все четыре колеса и только два во время ускорения.
Другая модификация датчика может предусматривать шарнирное коромысло 28 фиг.4) с противовесом 29, предназначенным компенсировать любое действие центробежных сил, а также коромысло 28 ( фиг. 5) , действующее в выемке или канавке 30, имеющей раз личные наклоны для отличия предельных моментов вращения.
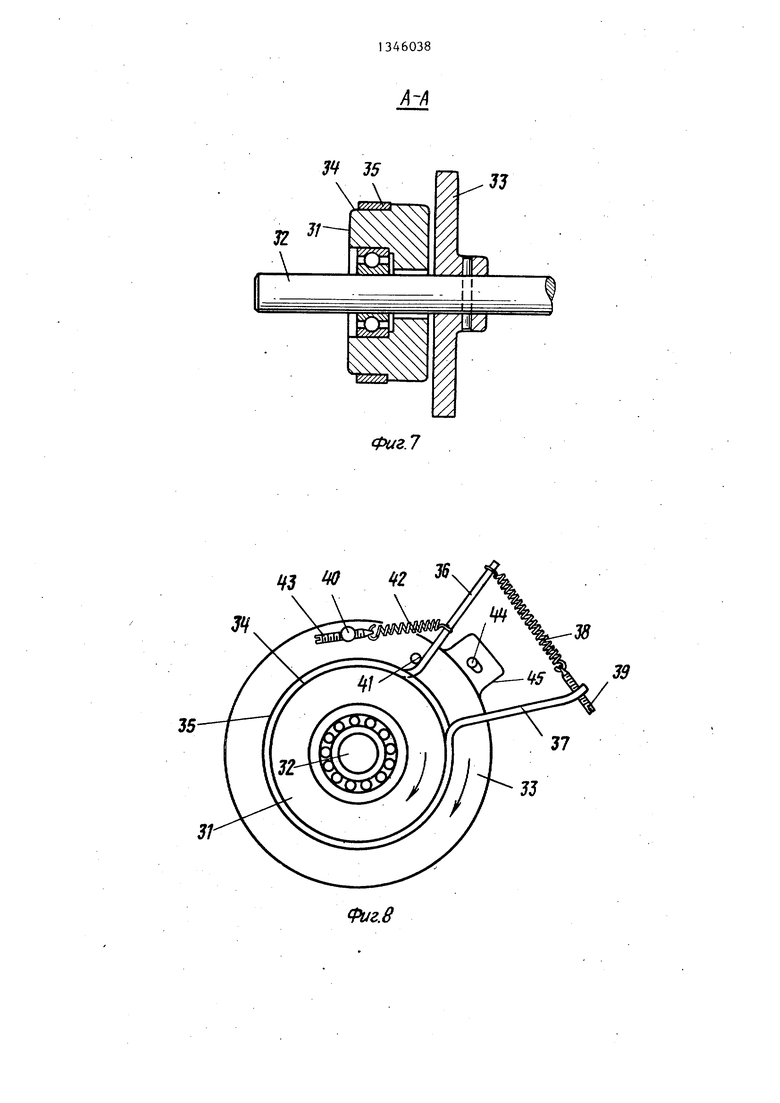
Центробежные средства предпочтительно 101еют форму маховика 31, (фиг. б) установленного для вращения относительно приводных средств в форме вала 32. Маховик 31 в рабочем состоянии соединяется с диском 33 гибкими средствами связи для выборочного расцепления и повторного сцепления, предпочтительно в форме ленты, спирально намотанной на окружную поверхность 34 маховика 31. Лента содержит спирально намотанную катушку 35, концы 36 и 37 которьй отогнуты наружу, образуя два радиально направленных плеча. Между концами 36 и 37 вставлена пружина 38 для стягивания концов 36 и 37 по направлению друг к
Q 5 0 5 О
0
5 0 5
5
другу, функции пружины 38 составляют установку управляющего момента кручения, которьш может регулироваться соответствующими средствами, например, проходящими через один конец 37 резьбовым винтом 39:
Желательно, чтобы внутренний диаметр катушки 35 был немного большим диаметра поверхности 34 маховика 31 при отсутствии силы смещения, развиваемой пружиной 38.
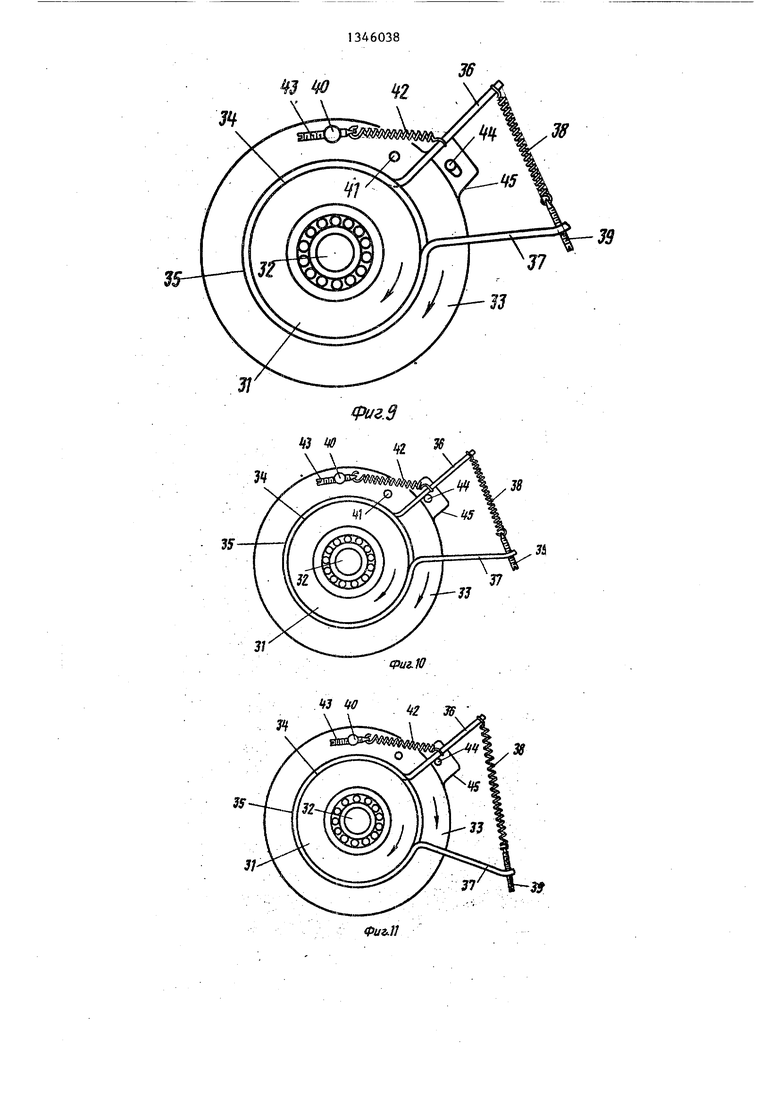
На фиг. 6-11 датчик имеет пару Осевых пальцев 40 и 41, выступающих из диска 33, для взаимодействия с Одним кон.цом 36 катущки 35. Этот конец 36 нормально удерживается в за-, цеплении с ограничительным пальцам 41 силой, первоначально настроенной пружиной 42,соединенной с концом 36 и пальцем 40 (фиг. 8). Этот режим характерен для датчика в течение вращения маховика 31 и диска 33 с переда- точньм отношением по угловым скоростям 1:1. Для регулировки первоначально настраиваемой пружины 42 предусмотрен проходящий через палец 40 винт 43. По мере приложения к соответствующему колесу транспортного средства тормозного усилия растет в направлении порогового значения развиваемый маховиком 31 относительно диска 33 момент кручения, предолева- ется сила , развиваемая первоначально настроенной пружины 42, заставляя один из концов 36 перемещаться по направлению к исполнительному пальцу 44 микропереключателя 45 (фиг. 9) . По . мере достижения колесом транспортного средства требуемого предела углового замедления конец 36 зацепляется , с исполнительным пальцем 44 и изменяет проводящее состояние микропереключателя 45 с тем, чтобы подавать сигнал к электрически запускаемому тормозному модулятору (фиг. 10). С продолжением чрезмерно крутого торможения колесо транспортного средства стремится размотать катушку 35 против силы действия пружины 38. В то время как конец 36 задержан исполнительным пальцем 44 микропереключателя, второй конец 37 движется (по часовой стрелке, как показано на фиг. 11), расцепляя маховик 31 и диск 33 и разрешая относительное вращение между ними.
Расцепление маховика 31 и диска 33 продолжается до тех пор, пока угловая
скорость колеса не упадет до значения, меньшего угловой скорости маховика, и пока противоположное измене- . кие углового ускорения колеса не восстановит вращение диска 33 до необходимого передаточного отношения с вращением маховика 31.
При возврате скоростей вращения к требуемому передаточному отношению происходит повторное сцепление диска и маховика (фиг. 10), маховик ускоряется, перемещая датчик из позиции на . фиг. 12 к положению на фиг. 8. Цикл движений из положений на фиг. 9 к положениям на фиг. 11 и обратно затем повторяется, как это требуется, в течение продолжения торможения или до тех пор, пока не остановится транспортное средство.
Предполагается,что при сохранении описанных вьш1е принципов работы показанные на фиг. 6-11 устройства могут быть модифицированы. Кроме того, предполагается, что при достижении первоначально установленного порогового значения момента вращения обеспечено быстрое срабатывание датчика. Иначе, целесообразно, чтобы пруншна
ственной оси вал 47 качания, соединенный в рабочем состоянии с пружиной 42 начальной регулировки и пружиной 38 управления крутящим моментом с радиально направленными пальцами 48 и 49. Вращение вала 47 вокруг его оси затягивает и ослабляет гибкий элемент (предпочтительно, синтетическую,
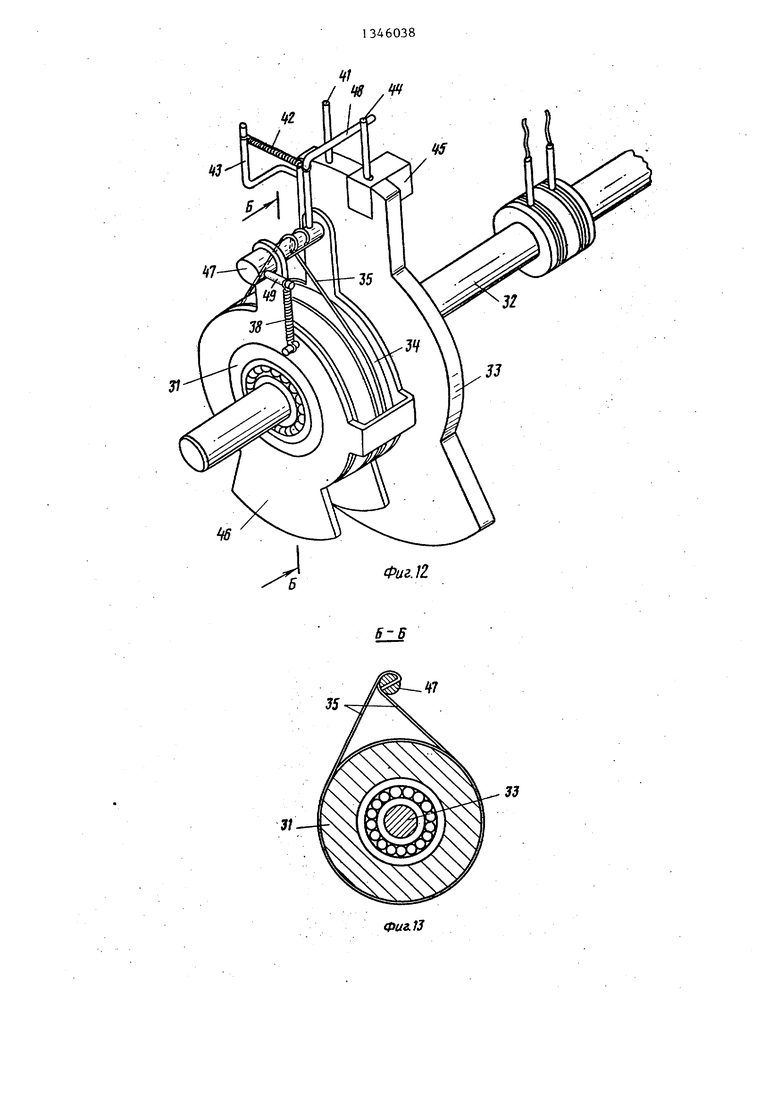
Q нерастяжимую нить), выполняющую функцию катушки 35. Действие датчика на фиг. 12 полностью совпадает с работой датчика на фиг. 9-11.
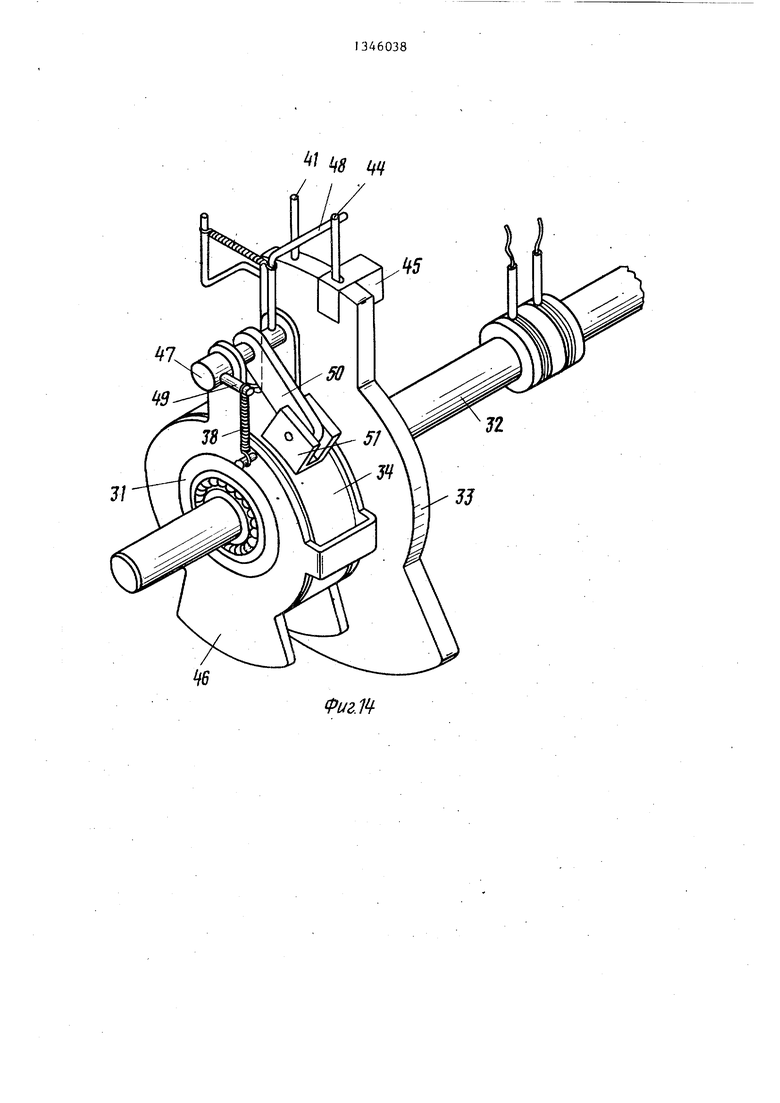
Датчик (фиг. 14) имеет те же конструктивные .элементы. Датчик на фиг. 14 отличается от датчика на фиг. 12; тем, что вращение вала 47 воздействует через кривошип 50 на башмак 51, выводя его из зацепления с круговой поверхностью 34, махови- ка 31. Во время работы датчика (фиг. 14) зацепление между башмаком 51 и круговой поверхностью 34 является пульсирующим за счет заклинивающего
25 действия с очень высокой частотой, тем самым.обеспечивающим развитие управляемого момента вращения, идентично повторяющемуся быстрому наматыва15
20
НИК И разматыванию катушки 35, как первоначальной регулировки 42, против Q на фиг. 6-11.
действия которой должен двигаться ко- Другое приближение к быстро повто- нец 36 при включении микропереключателя, имела очень небольшую или отрицательную постоянную упругости. Желательно, чтобы по мере движения конца 36 от его нормального положения быстро уменьшалась сила, развиваемая при ограничении этого конца. Одним из решений для достижения этой харак35
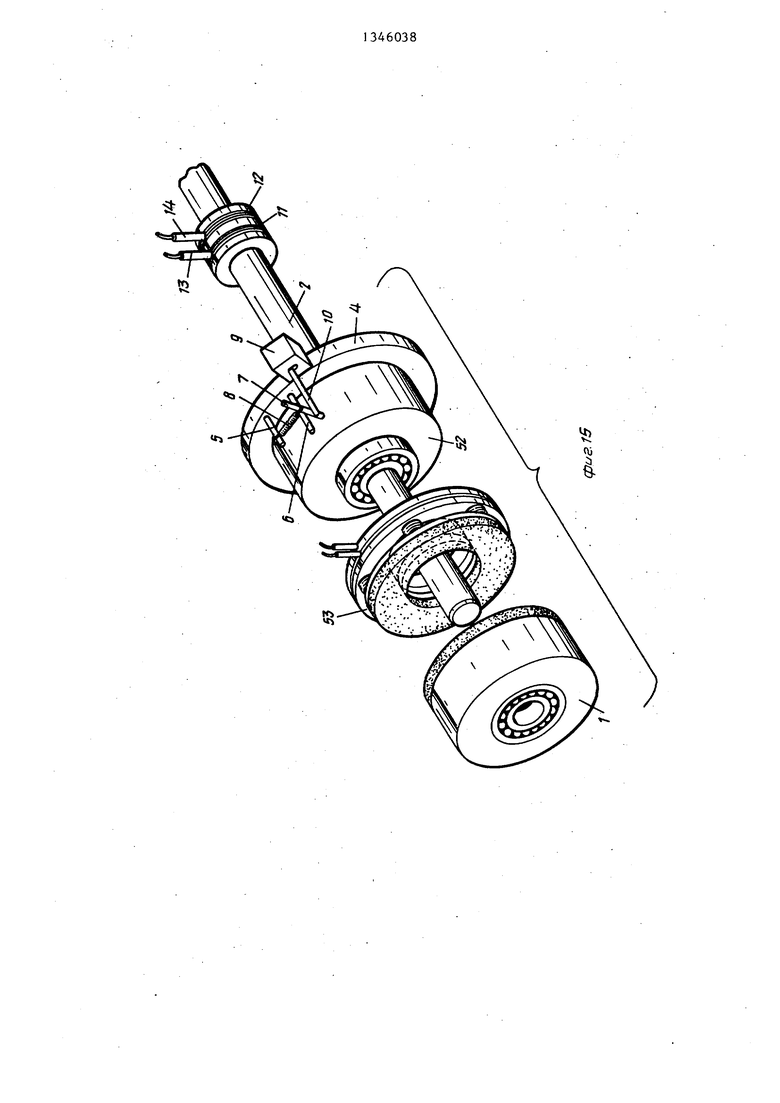
ряемым циклам сцепления и расцепления иллюстрируется на фиг. 15, подобные фиг. 1 конструктивные элементы датчика обозначены теми же позициями. Отличие между устройствами на фиг. 15 и 1 состоит в том, что между маховиком 1 и несущим элементом 52 для радиального пальца 7, который
теристики является использование маг- Q управляет действием микропереключатенитного пригятивания мелоду двумя относительно перемещаемыми элементами, например пальцем 41 и концом 36, с или без использования дополнительной пружины 42. Как только между этими элементами появляется небольшой воздушный зазор (фиг..9), то быстро падает действующая па этот конец сдерживающая сила.
Конструктивные элементы датчика на фиг. 12, подобные элементам датчика на фиг. 6, обозначены теми же номерами.
Датчик (фиг. 12) содержит перемыкающий элемент 46, установленный на. маховике 31 для вращения по отношению к нему вокруг центра вала 32. На перемыкающем элементе 46 установлен с возможностью вращения вокруг соб45
50
55
ля 9, вставлено электромагнитное устройство 53. Соответствующим соединением электромагнитного устройства 53 с микропереключателем 9 маховик 1 может бьп ь расцеплен и повторно соединен с несущим элементом 52 для выполнения работы в соответствии с настоящим изобретением. Электромагнитное устройство 52 также может быть использовано в сочетании с любым из устройств на фиг. 2-5 и может быть заменено другимг устройством сцепления при УСЛОВИЙ, что будет обеспечено расцепление и повторное сцепление с требуемь1ми частотами повторяемости.
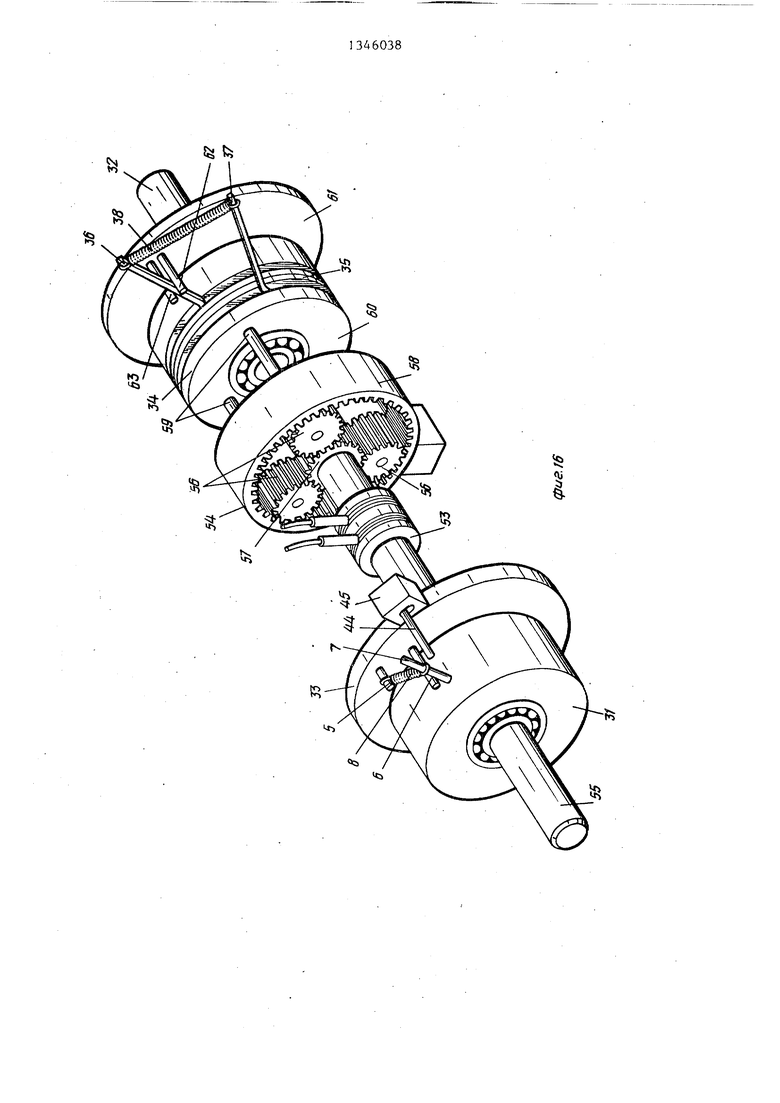
Средства (фиг. 1б, взаимосоёди- няющие вал 32 (вращательно соединен- ньй с вращаемым элементом, например; колесом транспортного средства) и маственной оси вал 47 качания, соединенный в рабочем состоянии с пружиной 42 начальной регулировки и пружиной 38 управления крутящим моментом с радиально направленными пальцами 48 и 49. Вращение вала 47 вокруг его оси затягивает и ослабляет гибкий элемент (предпочтительно, синтетическую,
нерастяжимую нить), выполняющую функцию катушки 35. Действие датчика на фиг. 12 полностью совпадает с работой датчика на фиг. 9-11.
Датчик (фиг. 14) имеет те же конструктивные .элементы. Датчик на фиг. 14 отличается от датчика на фиг. 12; тем, что вращение вала 47 воздействует через кривошип 50 на башмак 51, выводя его из зацепления с круговой поверхностью 34, махови- ка 31. Во время работы датчика (фиг. 14) зацепление между башмаком 51 и круговой поверхностью 34 является пульсирующим за счет заклинивающего
действия с очень высокой частотой, тем самым.обеспечивающим развитие управляемого момента вращения, идентично повторяющемуся быстрому наматыва
Другое приближение к быстро повто-
5
ряемым циклам сцепления и расцепления иллюстрируется на фиг. 15, подобные фиг. 1 конструктивные элементы датчика обозначены теми же позициями. Отличие между устройствами на фиг. 15 и 1 состоит в том, что между маховиком 1 и несущим элементом 52 для радиального пальца 7, который
5
0
5
ля 9, вставлено электромагнитное устройство 53. Соответствующим соединением электромагнитного устройства 53 с микропереключателем 9 маховик 1 может бьп ь расцеплен и повторно соединен с несущим элементом 52 для выполнения работы в соответствии с настоящим изобретением. Электромагнитное устройство 52 также может быть использовано в сочетании с любым из устройств на фиг. 2-5 и может быть заменено другимг устройством сцепления при УСЛОВИЙ, что будет обеспечено расцепление и повторное сцепление с требуемь1ми частотами повторяемости.
Средства (фиг. 1б, взаимосоёди- няющие вал 32 (вращательно соединен- ньй с вращаемым элементом, например; колесом транспортного средства) и ма713460388
ховик 31, включают планетарную зубча- вращения орбитального зубчатого коле- тую передачу 54, закрепленную на са 58, которое окружено катушкой 35.
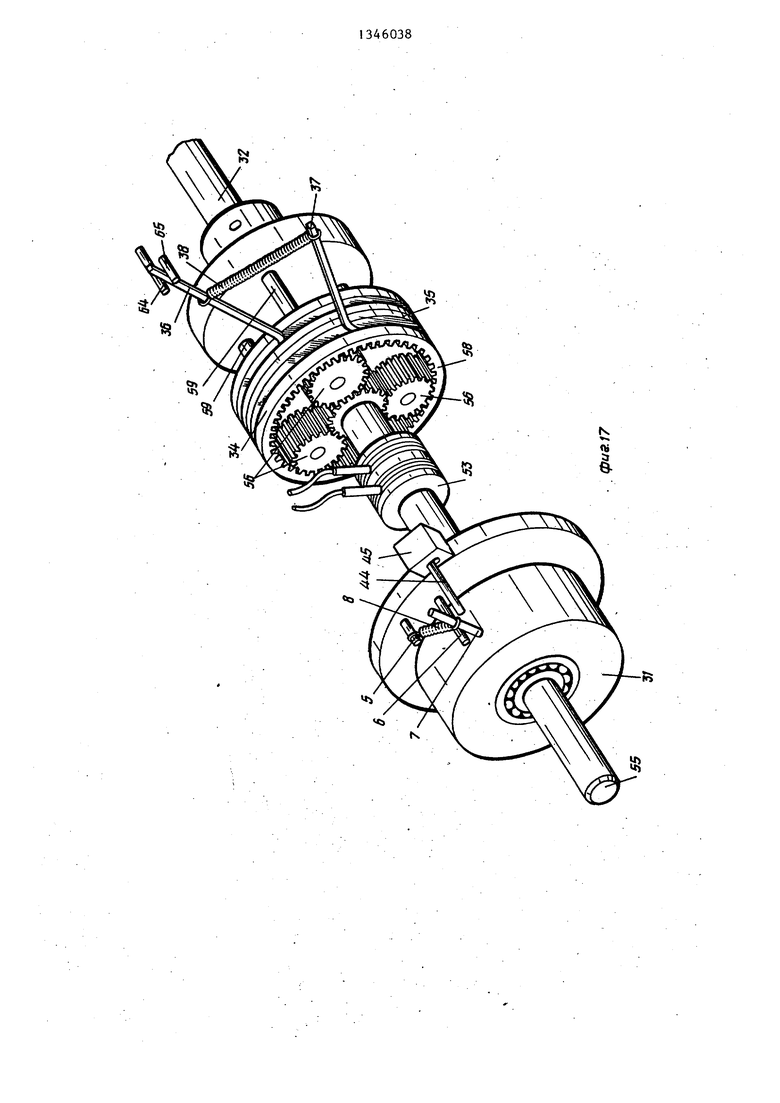
Один из концов 36 катушки 35, который крепится против движения, зацепляется стопорными пальцами 64 и 65, которые фиксированы относительно вращающихся элементов датчика. Удлиненные валы 59 планетарных зубчатьк ко- 10 лес 56 непосредственно приводятся от вала 32. При работе гибкость взаимосоединяющих средств обеспечивается вращением орбитального зубчатого колеса 58.
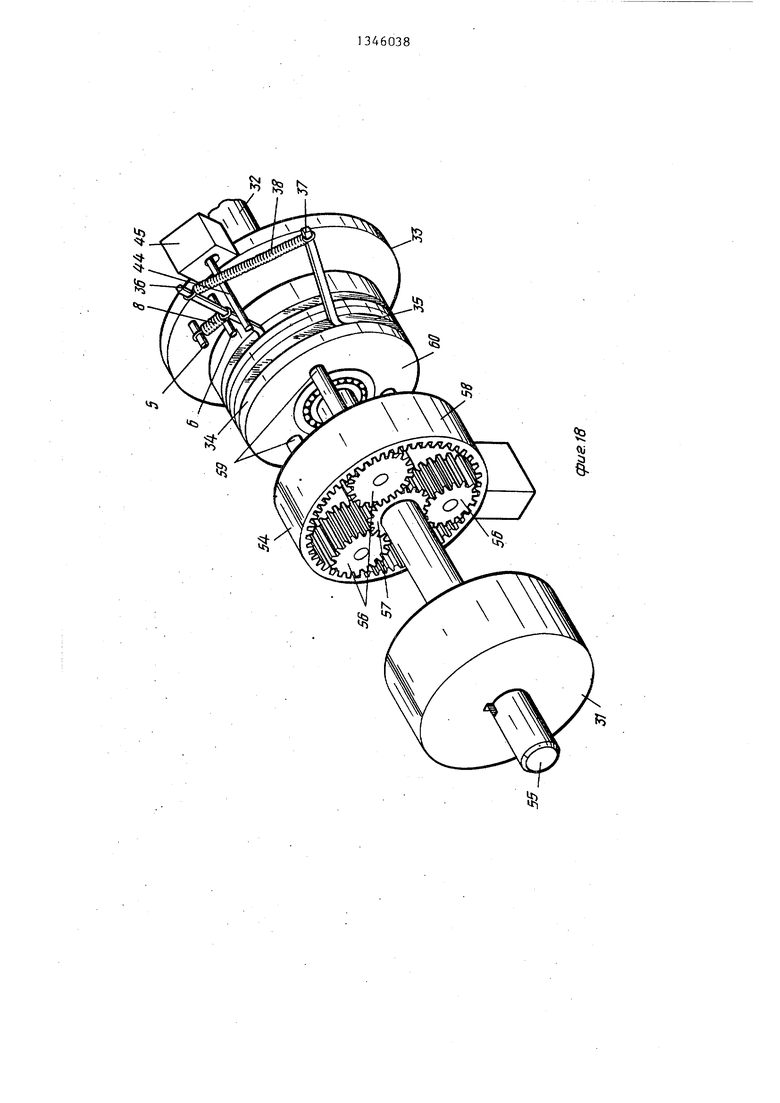
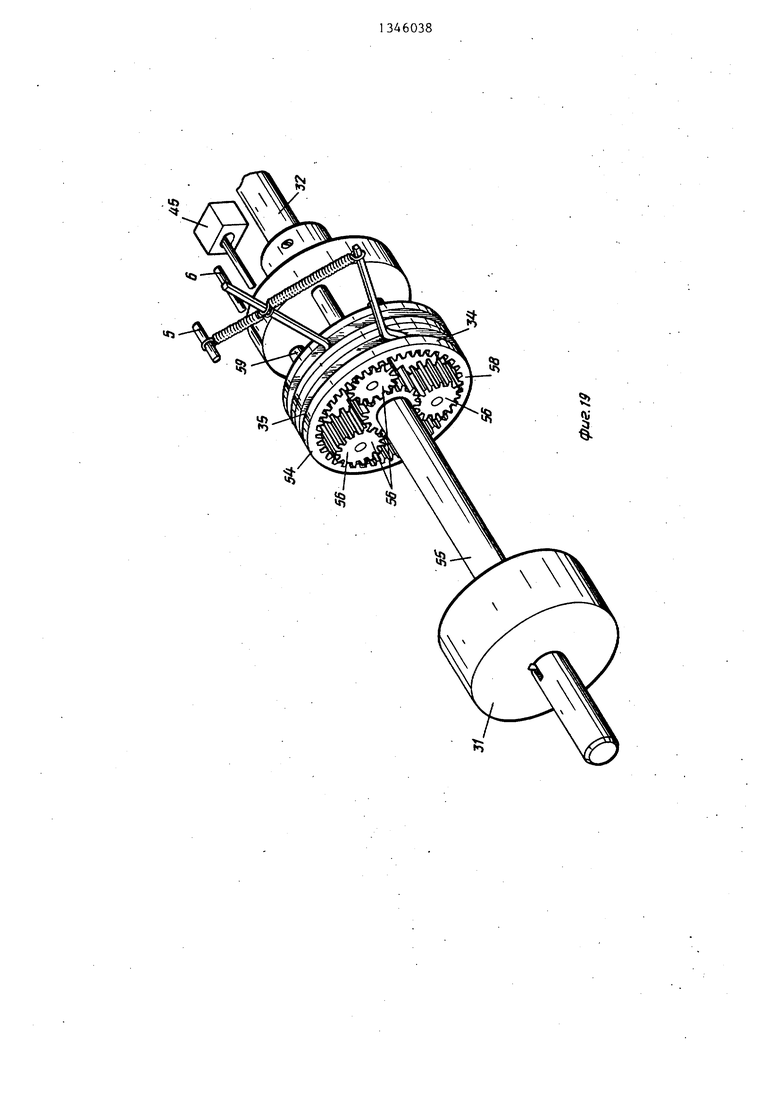
15 На фиг. 18 показана следующая модификация датчика, в котором вращаемые элементы, например колесо транспортного средства и маховик, нормаль- -но вращаются с известным передаточ- 20 ным отношением 1:1. Микропереключатель 45 устанавливается на диске 33, который вращается с валом 32, оперативно связанным с вращаемым элементом, таким как колесо транспортного 25 средства. При таком размещении микропереключателя и взаимодействия с одним из концов 36 ленты, установленной на вращаемом элементе 60,который задействует планетарную передачу 56, ляется с катушкой 35 ленты. Кроме то-ЗО маховик 31 может быть фиксирован от- го, вращаемый элемент 60 установлен носительно промежуточного вала 55, дпя вращения относительно вала 32. в то время как обеспечивается опера- Лента имеет пару радиально идущих ция в соответствии с изобретением, концов 36 и 37 и пружину 38 смещения. Другой вариант датчика, который действующую между ними. Один из кон- сочетает определенные признаки датчи- цов 36 закреплен относительно диска 61 ков на фиг. 17 и 18, показан на парой аксиально проходящих пальцев 62 фиг. 19, где конструктивные элемен- и 63.ты, схожие с конструктивными элеменМаховик 31 нормально приводится во тами фиг. 18, обозначены такими же вращение с известным передаточным от-до номерами. Различие между устройства- ношением по угловым скоростям переда- ми на фиг. 18 и 19 состоит в монтаже чей вращения от вала 32 через катуш- пальцев 5 и 6 и микропереключателя 45
неподвижно относительно других элементов датчика, тем самым устраняя
взаимосоединяющем валу 55 для передачи вращения диску 33, на котором установлен микропереключатель 45, имеющий рабочий палец 44. Маховик 31 имеет радиально выступающий палец 7, нормально смещаемый в зацепление с ограничительным пальцем 6 ограничительной пружиной 8, которая соединяет радиальный палец 7 с вторым пальцем 5, выходящим из диска 33.
Планетарная передача 54 дополнительно имеет три планетарных зубчатых колеса 56, каждое из которых находится в зацеплении как с солнечным зубчатым колесом 57, так и с .орбитальным зубчатым колесом 58. Орбитальное зубчатое колесо 58 заторможено, в то время как планетарные зубчатые колеса 56 .приводятся во вращение с помощью мягкого сцепления. В частности, каждое из планетарных зубчатых колес 56 установлено на соответствующем выступающем валу 59, выходящем из окруженного лентой элемента 60. Элемент 60 определяет круговую поверхность 34, которая зацепку 35 ленты, вращаемый элемент 60, планетарную передачу 54 и взаимосоединяющий вал 55. Одним из предпочти- 45 необходимость применения скользящих
колец или тому подобного.
Ограничители, воздействующие на один из концов 36 катушки 35 датчи- чение 5:1. В случае работы в соответ- ков на фиг. 12-20, при работе допус- ствии с последовательностью событий, 50 существенное ускорение маховительных передаточных отношении маховика относительно вращения колеса транспортного средства является знакак это указывалось при рассмотрении фиг. 6-11, между вращаемым элементом 60 и диском 61, которые нормально связаны катушкой 35 ленты, устанавливается гибкая связь.
На фиг. 17 показана модификация датчика на фиг. 16. Отличие между датчиками на фиг. 16 и 17 заключается в том, что имеется возможность
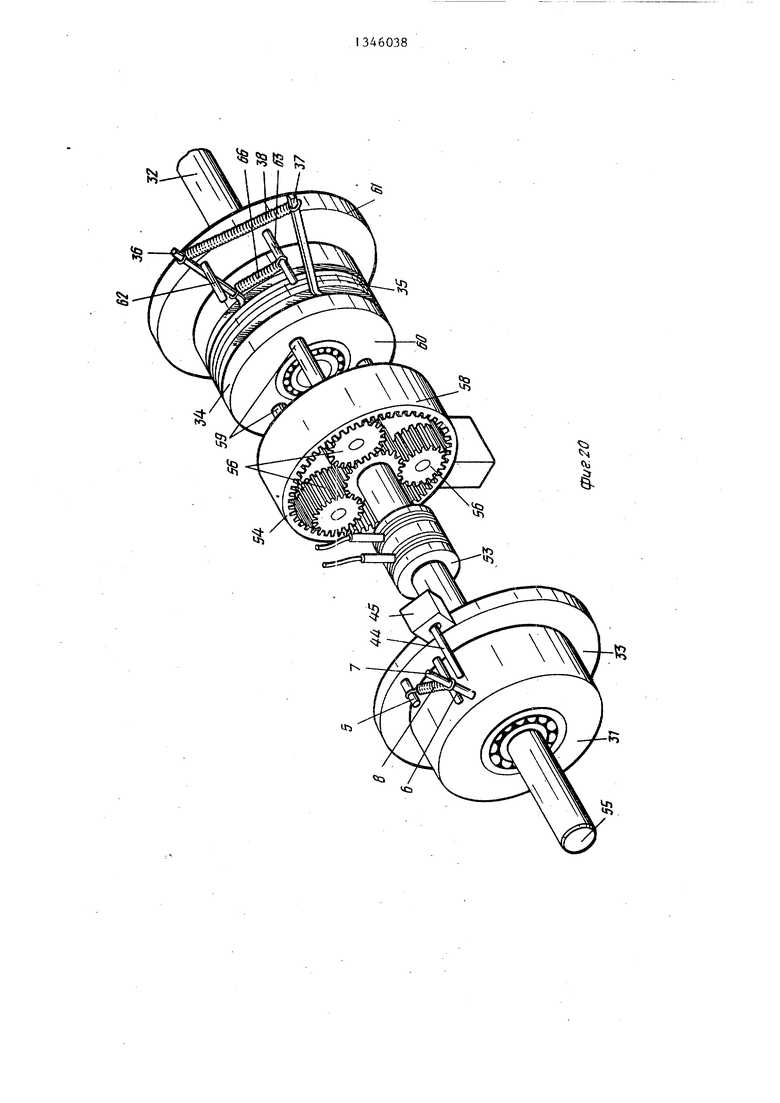
ка с неограниченным моментом враще - ния при повторном сцеплении. В примерах, где используются планетарные зубчатые передачи, изобретение пред- gg полагает, что посредством эффективного ограничения передаваемого момента кручения обеспечивается защита планетарной передачи. Такое исполнение показано на фиг. 20.
9134603810
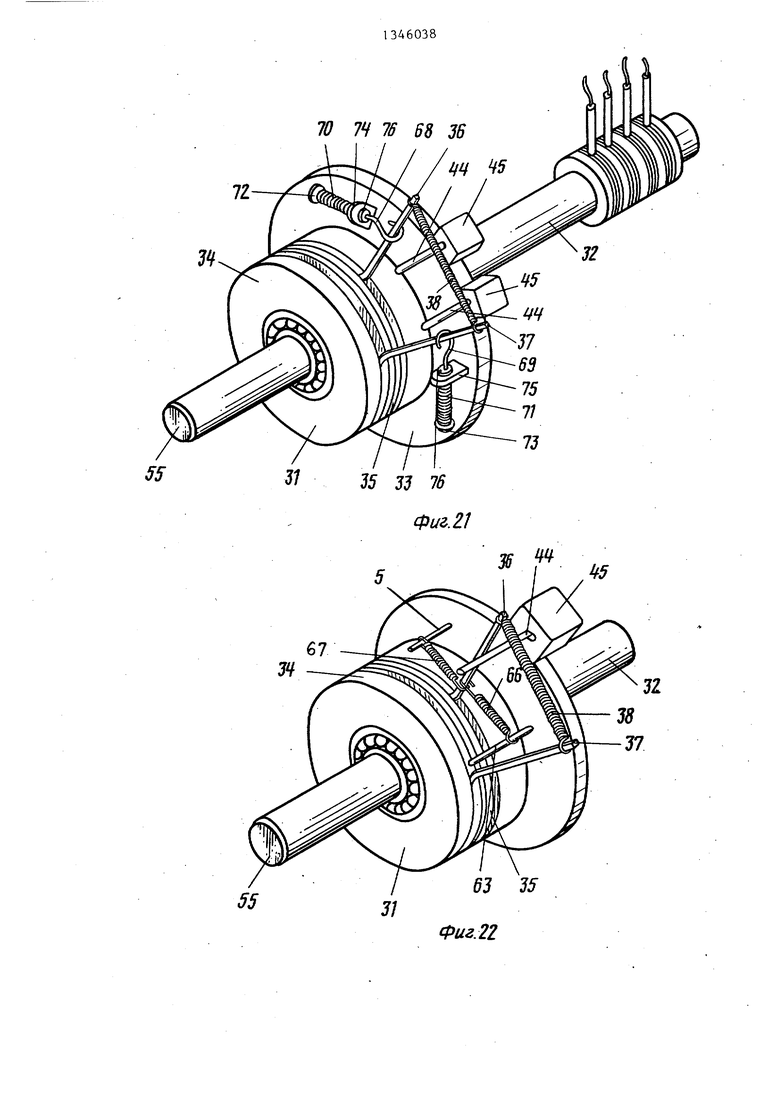
Датчик на фиг. 20, в основном, по- ся одним из пары крюков 68 и 69. Пру- добен датчику на фиг. 16, а поэтому жины 70 и 71 начальной установки возсравниваемые элементы обозначены теми же1 позициями. Конструктивные отличия заключаются в установке ограничивающего пальца 63 и ограничивающей ускорение пружины 66, действующей между концом 36 ленты и пальцем 63. Во время работы, датчик (фиг. 20} функционирует подобно раскрытым выше датчикам до точки, в которой ускоряющей вращаемый элемент или колесо транспортного средства повторно не сцепляется с маховиком. При повторном сцеплении конец 36 ленты отводится от ограничительного пальца 62, в то время как второй конец 37 дви- жется по направлению к ограничитель
ному пальцу 63. При развитии момента к ручения, стремящегося вращать маховик 31 и достаточного для преодоления силы развиваемой пружиной 66, другой конец 3.7 приходит в зацепление с пальцем 63, давая возможность раз- веденик концов 36 и 37 ленты.
Управление ускоряющим моментом вращения также приемлемо для датчиков, показанных на фиг. 22 и 23, у
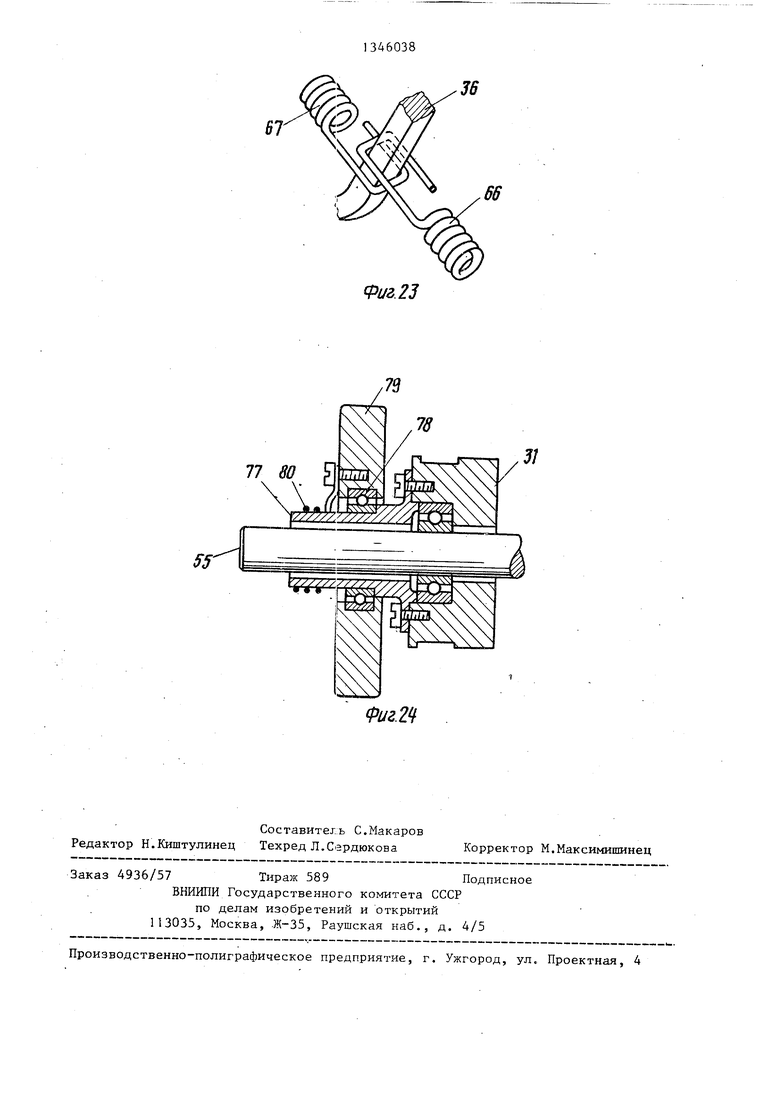
ко.торых нормальное передаточное отно- 30 балансир включает первую и вторую шение равно 1:1. Элементы датчика на массу. Первая масса представляет собой рассмотренный выше, маховик 31. Однако к нему с помощью соответствующих крепежных средств закреплена выфИг. 22 и 23, соответствующие описанным выше элементам, обозначены теми же позициями. Датчик (фиг. 22 и 23) используют пружину 66 для выполнения 35 ступающая часть 77. На выступающей функции, обеспечиваемой пальцами и части 77 имеется шарикоподшипник 78, т.д. в датчиках предыдущих фигур. С .на котором устанавливается второй ма- одного онца пружины 67 и 66 выполне- ховик 79. Посредством соответствую- ны с открытыми боковыми крюками щей муфты свободного хода, предпоч- . .(фиг. 23) для обеспечения относитель- 40 тительно в форме спирально намотанного .двИ7кения конца 36 в одном на- . ной катушки 80, прикрепленной с одноправлении. Пружина 66, предпочтительно, выполняется с внутренним напряжением и более жесткой по сравнению с пружиной 67.
Другая, форма датчика показана на фиг. 21 и выполнена так, чтобы действовать как датчик ускорения, так и датчик торможения, функционируюшдй в обоих направлениях вращения маховика 31 по отношению к вращению диска 33. Элементы, общие с рассмотренными вьше датчиками, обозначены теми же позициями.
Маховик 31 вместе с катушкой 35 способен поворачиваться на небольшой угол в любом направлении относительно диска 33 до тех пор, пока один из концов 36 и 37 катущки не остановитдействуют на концы 36 и 37 катушки через крюки 68 и 69 и зажаты между
соответствующими шайбами 72 и 73 и кронштейнами 74 и 75. Пороговые моменты для восприятия ускорения и торможения могут регулироваться до различных значений в двух направлениях относительного вращения выбором отличающихся сил, развиваемых двумя пружинами 70 и 71. Пружины 70 и 71 находятся под предварительным натягом
с помощью стопорных средств в форме шайб 76. Однако инерция маховика 31 одинакова в обоих направлениях.
В некоторых вариантах применения, например с движущими средствами, имеющими автоматические системы как дЛя управления торможением,, так и управления ускорением, целесообразно иметь отличные регулировки восприятия ускорения и торможения не только в отношении настройки силы пружины, но также и в отношении инерционных регулиг- ровок. Один из примеров выполнения такой дифференциации в инерционных регулировках по казан на фиг. 24,- где
щих крепежных средств закреплена выступающая часть 77. На выступающей части 77 имеется шарикоподшипник 78, на котором устанавливается второй ма- ховик 79. Посредством соответствую- щей муфты свободного хода, предпоч- тительно в форме спирально намотанной катушки 80, прикрепленной с одного конца к второму маховику 79, первая и вторая массы оперативно сцепляются друг с другом для вращения с общей угловой скоро стью в одном направлении и оперативно расцепляются для вращения только одной массы в противоположном направлении.
Формула изобретени-я
1. Датчик замедления колеса транспортного средства, оборудованного антиблокировочным устройством, содержа- щий кинематически связанный с колесом вал, на котором жестко закреплен диск и установлен с возможностью поворота маховик, имеюш й .ynpyrjTo связь с диском, на котором закреплены упор
1113
для ограничения поворота маховика и переключатель, включенный в электрическую цепь управления антиблокировочного устройства, отличающийся тем, что, с целью повышения чувствительности датчика к достижению колесом предельного замедления упругая связь с диском вьтолнена в виде навитой на маховик упругой лен- ты с радиально отогнутыми концами, первый из которых соединен пружиной растяжения с пальцем,закрепленным на диске, и регулируемой стягивающей пружиной связан с вторым концом, пе- реключатель выполнен с управляющим элементом в виде пальца, расположенного между отогнутыми концами упругой ленты, а упор для ограничения поворота маховика вьтолнен в виде паль- ца, к которому пружиной растяжения прижат первый отогнутый конец упругой ленты.
2. Датчик ПОП.1, отлича ю- щ и и с я тем, что он снабжен допол- нительным маховиком, установленным с возможностью вращения на втулке, жестко связанной с основным маховиком, при этом дополнительный маховик связан с втулкой обгонной муфтой, вьтолненной в виде спиральной пружи38-12
ны, навитой на втулку, один конец которой закреплен на дополнительном маховике.
3.Датчик по п. 1, отличающийся тем, что он снабжен дополнительным маховиком, установленным с возможностью вращения на дополнительном валу, и планетарной передачей, имеющей солнечную шестерню,соединенную электрически управляемой муфтой сцепления с дополнительном валом, коронную шестерню и сателлиты, установленные на осях, жестко связанных с основным маховиком, при этом на дополнительном валу жестко закреплен дополнительный диск с установленным на нем переключателем, имеющим управляющий палец, выступающий в сторону дополнительного маховика, на котором закреплен радиальный палец, соединенный пружиной растяжения с пальцем, жестко связанным с дополнительным диском, на котором жестко закреплен другой палец, ограничивающий перемещение радиального пальца под действием пружины растяжения.
4.Датчик по п. 1, отличающийся тем, что упругая лента выполнена металлической с цилиндрическим поперечным сечением.
12
ФигЛ
.f
иг5



Изобретение относится к области технических средств, обеспечивающих автоматическое управление торможени32 ем транспортных средств. Цель изобретения - повьшение чувствительности датчика к достижению колесом предельного замедления. На валу 32 закреплен диск 33 с переключателем 45 и установлен с возможностью вращения маховик 3I. Вал 32 кинематически связан с затормаживаемым колесом. При торможении маховик 31 поворачивается на валу 32 до упора конца 36 ленты в палец 44 переключателя 45. В дальнейшем пружина 38 растягивается, ослабляя сцепление катушки 35 ленты с поверхностью 34 маховика 31 и обеспечивая свободное его проворачивание. 3 з.п. ф-лы, 24 ИИ. СО со 4 О5 О СО 00 см фиг. 6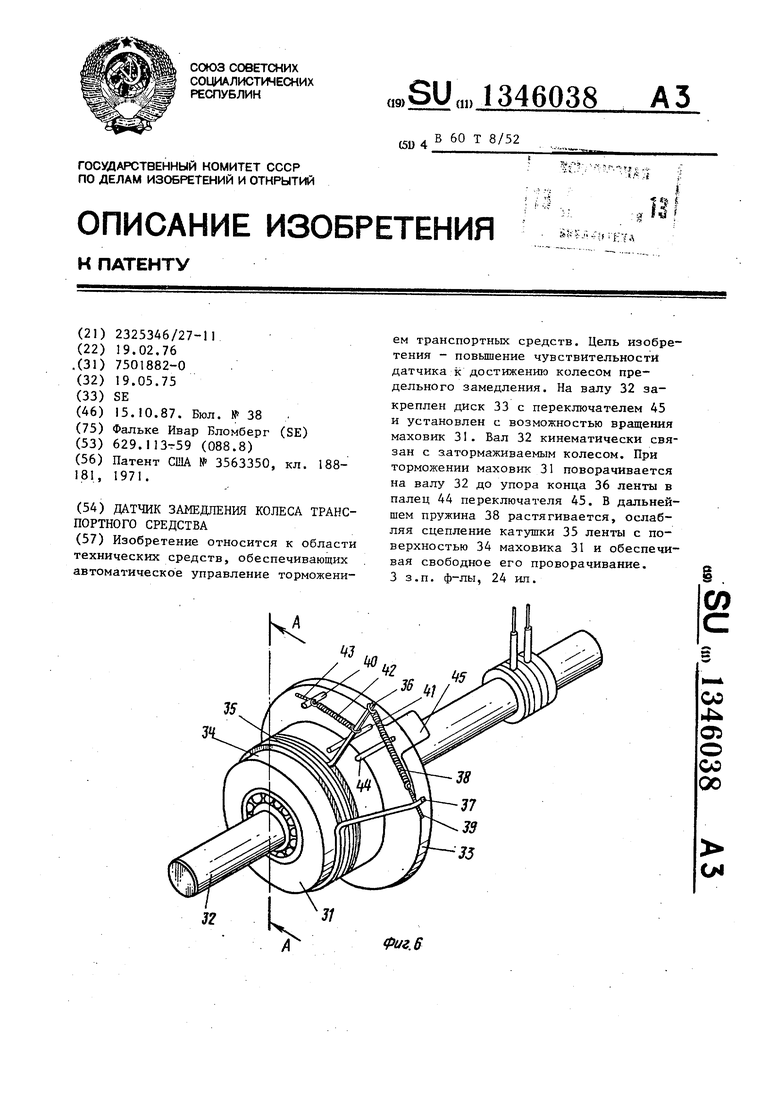
23
uzk
Фиг. 5
3 35
П
31
3J
11
LL
Фиг. 7
if3 2
ЗЦ
31
38
33
г,8
J
д8
Фиг.д « JS
39
/
да
сртЮ
43 ЦО
yt
2 3S
38
«J
7
Фиг.12
35
ft
Фиг.13
8 ifif
31
Фиг.П
t
«
i
6
ij-i
г
ч
-t
In
.s .ч% 5
г
4i
45
10 14 16 68 36
72
J
67
Л
36
63 35
Фиг. 22
36
Фиг. 23
77 80
Составитегь С.Макаров Редактор Н.Киштулинец Техред Л.Сердюкова
Заказ 4936/57 Тираж 589Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, .Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(риг.2
Корректор М.Максимишинец
| Патент США № 3563350, кл | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
