Изобретение относится к асинхронному электроприводу и может быть использовано в промышленности и на транспорте в системах электропривода с прямым управлением моментом асинхронных двигателей (АД).
Известен способ двухзонного регулирования скорости асинхронного электропривода с ослаблением потока ротора в системе векторного управления (Козярук А.Е., Рудаков В.В. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов. - СПб.: Санкт-Петербургская электротехническая компания, 2004. - прототип). В данном способе блок задания потокосцепления в первой зоне регулирования (при частоте вращения двигателя ниже номинальной) устанавливает номинальное значение потокосцепления ротора двигателя. Во второй зоне регулирования (при частоте вращения двигателя выше номинальной) ослабление поля (уменьшение магнитного потока по отношению к номинальному значению) достигается за счет изменения задания на потокосцепление ротора обратно-пропорционально увеличению частоты вращения по отношению к номинальной. Минимизация тока статора может осуществляться путем поддержания равенства составляющих тока статора.
Недостатками этого способа являются традиционная для векторных систем сложность и большой объем вычислений, невысокая устойчивость к возмущениям, косвенное влияние на потокосцепление ротора через изменение тока статора, отсутствие регулирования потокосцепления двигателя в первой зоне, недоиспользование двигателя по мощности и нагреву во второй зоне.
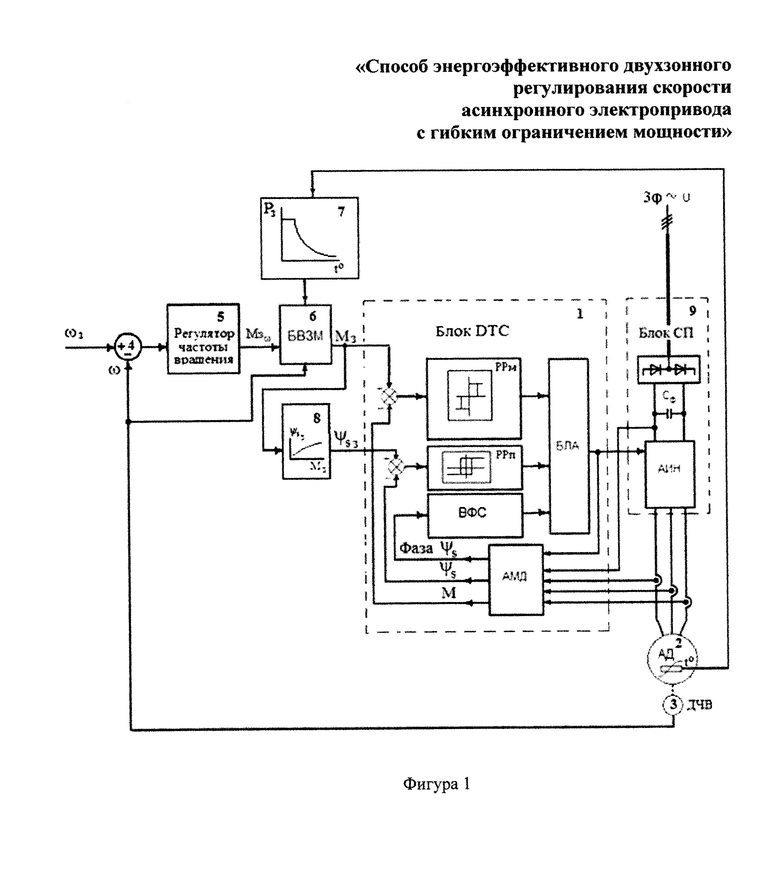
Известна система прямого управления моментом (Direct Torque Control, - DTC) (Козярук A.E., Рудаков В.В. Системы прямого управления моментом в частотно-регулируемых электроприводах переменного тока / под ред. Народицкого А.Г. - СПб.: Санкт-Петербургская электротехническая компания, 2005), которую можно использовать для энергоэффективного двухзонного управления АД. В системе прямого управления моментом реализовано непосредственное высокодинамичное релейное регулирование потокосцепления статора и момента двигателя по отклонению. К отличительным особенностям DTC (блок 1 на фиг. 1, 2) можно отнести наличие в системе: - гистерезисных релейных регуляторов потокосцепления статора (РРп) и момента (РРм) асинхронного двигателя;
- электронной адаптивной модели двигателя (АМД) для вычисления текущих управляемых координат асинхронного двигателя (потокосцепления статора, электромагнитного момента, температуры и др.) по значению фазных токов, напряжения в звене постоянного тока и коммутационной функции автономного инвертора напряжения (АИН);
- вычислителя фазового сектора (ВФС), в котором в текущий момент времени находится вектор потокосцепления статора двигателя;
- табличного (матричного) вычислителя оптимального вектора напряжения двигателя, выполняемого в виде блока логического автомата (БЛА) и определяющего функцию переключения вентилей АИН.
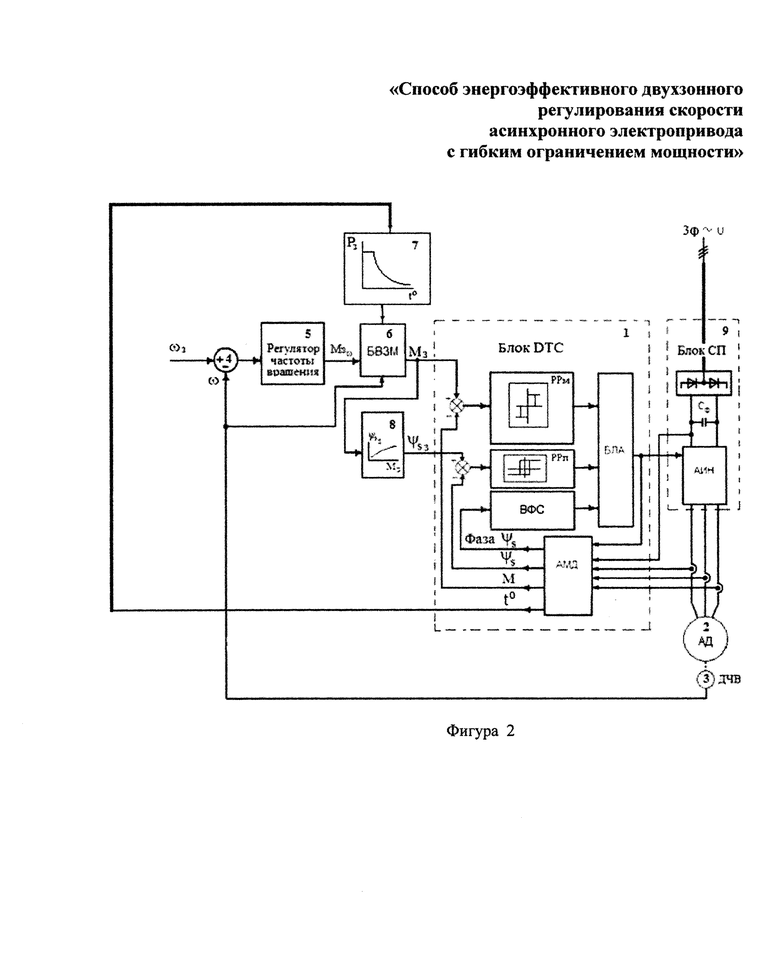
В блоке DTC имеются также два алгебраических сумматора. В одном из них сравнивается задание на момент Мз, поступающее из системы управления, и момент двигателя, вычисленный АМД; полученное рассогласование поступает на РРм. Во втором сумматоре сравнивается задание на потокосцепление ψsз поступающее из системы управления, и потокосцепление двигателя ψs, вычисленное АМД; полученное рассогласование поступает на РРп. АМД вычисляет также фазу вектора потокосцепления (фаза ψs). При необходимости в АМД блока 1 (блок DTC) можно производить также вычисление температуры обмоток статора двигателя t0 (фиг. 2).
Система DTC обладает высоким быстродействием и в то же время в ней не требуются необходимые при реализации векторного управления преобразователи координат регуляторы составляющих тока статора, блоки компенсации перекрестных обратных связей АД, организация широтно-импульсной модуляции (ШИМ). Кроме того, система более устойчива к возмущениям и неточности информации о переменных состояния объекта управления, чем векторная система. Однако для систем DTC недостаточно проработаны энергосберегающие способы управления двигателями, что не позволяет полостью реализовать все преимущества DTC.
Целью изобретения является реализация энергоэффективного двухзонного регулирования асинхронного двигателя в системе прямого управления моментом при наиболее полном использовании двигателя по нагреву и мощности.
Технический результат достигается тем, что в данном способе, использующем прямое управление моментом, определение ограничения задания на момент, вычисленного регулятором скорости, производится путем деления заданной мощности на частоту вращения ротора двигателя, причем величина заданной мощности определяется в зависимости от температуры обмотки статора двигателя, вычисляемой по модели или измеряемой датчиком температуры, по следующей формуле:

где Pз - заданная мощность, Pн - номинальная мощность двигателя; θдоп - допустимая температура обмотки статора; t0 - текущая температура обмотки,
а задание на потокосцепление статора определяется в первой и второй зоне регулирования по значению задания на момент на основе заранее рассчитанной зависимости потокосцепления статора от момента двигателя, обеспечивающей минимальное значение тока статора при заданном моменте и имеющей вид кривой с насыщением.
Функциональные схемы систем двухзонного регулирования скорости АД, реализующих данный способ, представлены на фиг. 1, 2. В схеме фиг. 1 температура асинхронного двигателя 2 измеряется датчиком температуры обмоток статора, встроенном в АД, а в схеме рис. 2 вычисляется по модели в блоке 1 (блок DTC). Измерение температуры датчиком является более точным, поэтому оно предпочтительно (фиг. 1), однако это требует установки датчика в асинхронном двигателе. В случае отсутствия датчика возможно вычисление температуры по тепловой модели двигателя, включаемой в этом случае в адаптивную модель двигателя блока 1 (фиг. 2), однако это снижает точность определения температуры.
В обоих случаях в представленных схемах (фиг. 1, 2) имеется внешний контур регулирования частоты вращения (угловой скорости) двигателя. Темп нарастания задания на частоту вращения ωз может определяться задатчиком интенсивности (на схемах не показан). Действительная угловая скорость ротора АД измеряется датчиком частоты вращения 3 (ДЧВ). Рассогласование между заданной (ωз) и действительной угловой скоростью двигателя (ω), определяемое в сумматоре 4, подается на регулятор скорости 5, который формирует предварительное задание на момент тягового двигателя (Мзω). Затем в блоке 6 вычисления задания момента с учетом ограничений (БВЗМ) определяются ограничения и окончательное задание на момент Мз, поступающее в блок 1 (DTC), по следующим уравнениям:

где Мзогр - ограничение задания на момент АД; Мзmax - ограничение по моменту, устанавливаемое обычно, исходя из допустимого тока вентилей статического преобразователя.
Величина заданной мощности Pз определяется в зависимости от температуры обмоток статора t0 двигателя в блоке 7 по формуле

где Pз - заданная мощность, Pн - номинальная мощность двигателя; θдоп - допустимая температура обмотки статора; t0 - текущая температура обмотки, с ограничением заданной мощности на уровне Pз=1,2Pн.
Задание на потокосцепление статора ψsз определяется в блоке 8 для первой и второй зоны регулирования скорости АД по найденному с использованием уравнений (1, 2) заданию на момент Мз на основе заранее рассчитанной зависимости потокосцепления статора от момента двигателя ψsз=f(Mз) по условию минимума тока статора, имеющей вид кривой с насыщением. Найденное задание потокосцепления поступает в блок 1 (блок DTC). Применение DTC позволяет отдельно регулировать электромагнитный момент и потокосцепление статора двигателя по энергосберегающему закону с высоким быстродействием. Управляющие сигналы, выработанные в блоке 1, подаются в блок статического преобразователя 9 (блок СП) для управления вентилями АИН.
В первой зоне регулирования скорости при реализации низких скоростей и низких заданиях на момент (в случае пониженной нагрузки двигателя) задание на потокосцепление статора автоматически снижается по заданной кривой ψsз=f(Mз) (фиг. 1, 2). При увеличении нагрузки задание на момент возрастает (вплоть до Мзmax) и соответственно увеличивается задание на потокосцепление статора.
По мере разгона двигателя и увеличения частоты вращения ω вверх от номинального значения задание на момент с учетом принятых ограничений (см. выражения 1) неизбежно снижается с ростом со и одновременно снижается задание на потокосцепление статора по заданной расчетной зависимости ψsз=f(Mз). При этом двигатель автоматически переходит в зону ослабления поля (во вторую зону).
В данной системе электропривода перед пуском двигателя необходимо установить заданный уровень потокосцепления. Для этого используется режим предварительного намагничивания, заключающийся в установке задания на потокосцепление на заданном начальном уровне при задании на момент равном нулю. После намагничивания АД задание на момент повышается с требуемой интенсивностью и далее реализуется расчетная зависимость ψsз=f(Mз).
Таким образом, в первой и второй зонах производится регулирование потокосцепления статора по энергосберегающему закону, причем одновременно реализовано регулирование максимально допустимой мощности двигателя в зависимости от температуры обмоток, позволяющее дозировано изменять его перегрузочную способность.
Плавное (гибкое) регулирование заданной мощности Pз в зависимости от температуры обмоток позволяет без сокращения срока службы повышать мощность двигателя, временно перегружая его в случае необходимости, например, при преодолении подъема транспортным средством или снижении давления в магистрали при увеличении разбора жидкости, а также предохранять двигатель от превышения температуры. Одновременно предлагаемая реализация энергосберегающего двухзонного регулирования в системе прямого управления моментом позволяет снизить потери и повысить КПД асинхронного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| ЭНЕРГОЭФФЕКТИВНЫЙ СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2014 |
|
RU2586944C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электпропривод | 1979 |
|
SU879724A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКОСЦЕПЛЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ В СОСТАВЕ ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ ПОЛЕОРИЕНТИРОВАННЫМ УПРАВЛЕНИЕМ ПРИ РАБОТЕ В ЗОНЕ ОГРАНИЧЕННОГО НАПРЯЖЕНИЯ | 2021 |
|
RU2759558C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
Изобретение относится к области электротехники и может быть использовано в промышленности и на транспорте в системах электропривода с прямым управлением моментом асинхронных двигателей (АД). Способ двухзонного регулирования скорости асинхронного двигателя, использующий прямое управление моментом. Техническим результатом является обеспечение двухзонного регулирования асинхронного двигателя в системе прямого управления моментом при более полном использовании двигателя по нагреву и мощности. В способе двухзонного регулирования скорости асинхронного электропривода определение ограничения задания на момент, вычисленного регулятором скорости, производится путем деления заданной мощности на частоту вращения ротора двигателя, причем величина заданной мощности определяется в зависимости от температуры обмотки статора двигателя, вычисляемой по модели или измеряемой датчиком температуры, по следующей формуле:

где Pз - заданная мощность, Pн - номинальная мощность двигателя; θдоп - допустимая температура обмотки статора; t0 - текущая температура обмотки, а задание на потокосцепление статора определяется в первой и второй зоне регулирования по значению задания на момент на основе заранее рассчитанной зависимости потокосцепления статора от момента двигателя, обеспечивающей минимальное значение тока статора при заданном моменте и имеющей вид кривой с насыщением. 2 ил.
Способ двухзонного регулирования скорости асинхронного двигателя, использующий прямое управление моментом (Direct Torque Control - DTC), отличающийся тем, что в данном способе определение ограничения задания на момент, вычисленного регулятором скорости, производится путем деления заданной мощности на частоту вращения ротора двигателя, причем величина заданной мощности определяется в зависимости от температуры обмотки статора двигателя, вычисляемой по модели или измеряемой датчиком температуры, по следующей формуле:
где Рз - заданная мощность, Рн - номинальная мощность двигателя; θдоп - допустимая температура обмотки статора; t0 - текущая температура обмотки,
а задание на потокосцепление статора определяется в первой и второй зоне регулирования по значению задания на момент на основе заранее рассчитанной зависимости потокосцепления статора от момента двигателя, обеспечивающей минимальное значение тока статора при заданном моменте и имеющей вид кривой с насыщением.
| УПРАВЛЕНИЕ И/ИЛИ РЕГУЛИРОВАНИЕ ТРЕХФАЗНОГО ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРОЭНЕРГИИ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АСИНХРОННОЙ МАШИНЫ | 2007 |
|
RU2455751C2 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| УСТРОЙСТВО ДЛЯ НАНИЗЫВАНИЯ ИЗОЛИРУЮЩИХ БУС НА ПРОВОЛОКУ | 0 |
|
SU152678A1 |
| DE 2914595 A1, 18.10.1979 | |||
| US 2015048774 A1, 19.02.2015 | |||
| ЗАРЯД СКРЕПЛЕННЫЙ | 2000 |
|
RU2190113C2 |
| WO 2014094319 A1, 26.06.2014 | |||
| CN 10401957 A,10.12.2014. | |||

