Изобретение относится к рельсовому транспорту и может быть использовано на подвижном составе с асинхронными тяговыми двигателями (АТД), подключенными параллельно к одному автономному инвертору напряжения (АИН). На локомотивах такое параллельное подключение к одному инвертору и совместное управление (регулирование) АТД осуществляется обычно в пределах каждой тележки, поэтому его часто называют «потележечным» регулированием АТД.
Известен способ управления асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору (Патент РФ на изобретение RU 2428326 / Федяева Г.А., Федяев Н.А., Матюшков С.Ю., Роговцев Г.В. // Официальный бюллетень Российского агентства по патентам и товарным знакам. Изобретения. Полезные модели. Опубл. 10.09.2011. - Бюл. №25 - прототип) с использованием прямого управления моментом АТД (Direct Torque Control, сокращенно DTC). В данном способе задание на потокосцепление статора  , подаваемое в блок DTC, определяется в системе управления верхнего уровня по заданной зависимости
, подаваемое в блок DTC, определяется в системе управления верхнего уровня по заданной зависимости  , где
, где  - средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя. Такой подход является традиционным, и к недостаткам данного способа относится то, что данный подход не использует энергетически эффективные (энергоэффективные) законы управления АТД.
- средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя. Такой подход является традиционным, и к недостаткам данного способа относится то, что данный подход не использует энергетически эффективные (энергоэффективные) законы управления АТД.
Целью изобретения является управление асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору, обеспечивающее высокодинамичное регулирование момента двигателей и предупреждение буксования (и юза) при энергоэффективном управлении АТД по критерию минимума тока статора.
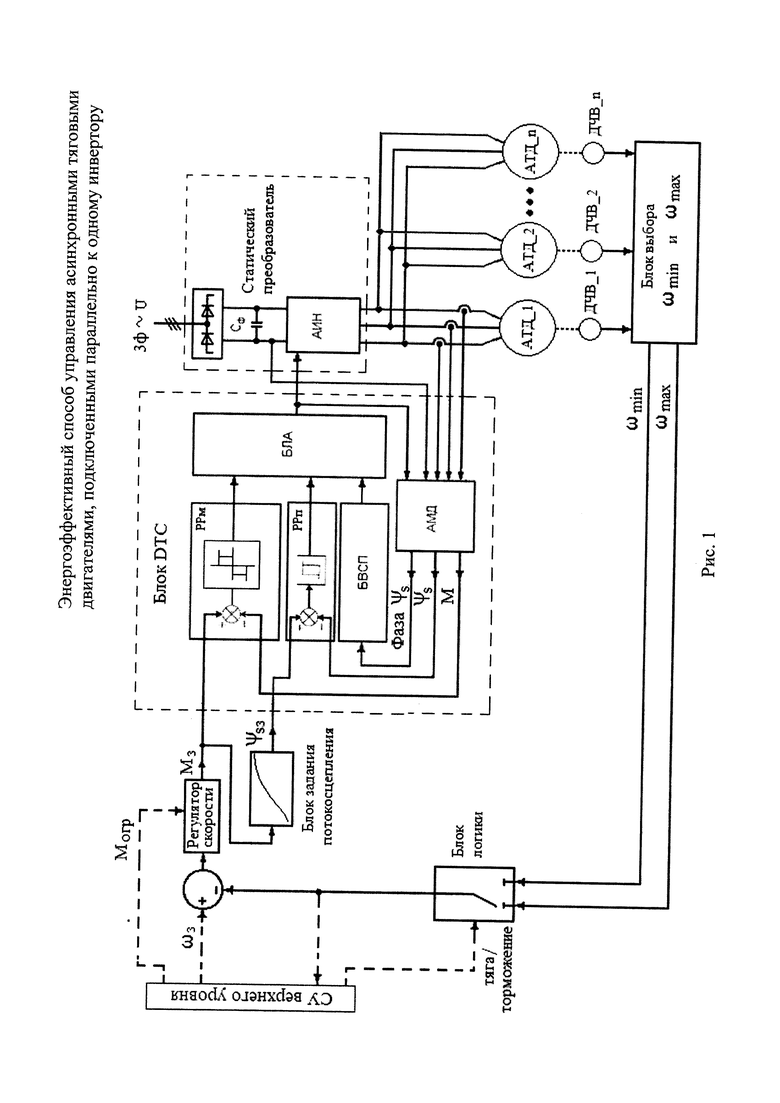
Технический результат достигается тем (рис. 1), что в данном способе, использующем прямое управление моментом, вычисление текущих значений электромагнитного момента и потокосцепления статора ведется в блоке DTC всегда только по двигателю первой оси тележки в соответствии с выражениями:


 .
.

где  и
и  - потокосцепления первого двигателя по оси α и β соответственно;
- потокосцепления первого двигателя по оси α и β соответственно;
 и
и  - напряжения статора параллельно включенных двигателей по оси α и β соответственно;
- напряжения статора параллельно включенных двигателей по оси α и β соответственно;
 и
и  - токи статора первого двигателя по оси α и β соответственно;
- токи статора первого двигателя по оси α и β соответственно;
 - сопротивление фазы обмотки статора первого двигателя, корректируемое с учетом изменения температуры обмотки;
- сопротивление фазы обмотки статора первого двигателя, корректируемое с учетом изменения температуры обмотки;
 - электромагнитный момент первого двигателя;
- электромагнитный момент первого двигателя;
p - число пар полюсов;
 - модуль вектора потокосцепления статора первого двигателя;
- модуль вектора потокосцепления статора первого двигателя;
 - фаза вектора потокосцепления статора первого двигателя;
- фаза вектора потокосцепления статора первого двигателя;
а вычисление задания на момент, подаваемого в блок DTC, ведется регулятором скорости с использованием сигналов максимальной или минимальной скорости вращения параллельно включенных асинхронных двигателей: в режиме тяги управление ведется по максимальной, а в режиме торможения - по минимальной скорости вращения при использовании пропорционально-интегрального регулятора скорости, задание на момент Мз, поступающее в блок DTC, вычисляется по формулам:
 - в режиме тяги
- в режиме тяги
 - в режиме торможения
- в режиме торможения
и ограничивается на величине  , в случае ее превышения,
, в случае ее превышения,
где  - коэффициент усиления пропорционального звена регулятора скорости;
- коэффициент усиления пропорционального звена регулятора скорости;
 - постоянная T
ω времени интегрального звена регулятора скорости;
- постоянная T
ω времени интегрального звена регулятора скорости;
 - задание скорости вращения, поступающее из системы управления верхнего уровня и определяемое с учетом обеспечения оптимального проскальзывания колес;
- задание скорости вращения, поступающее из системы управления верхнего уровня и определяемое с учетом обеспечения оптимального проскальзывания колес;
 - максимальная скорость вращения параллельно включенных двигателей;
- максимальная скорость вращения параллельно включенных двигателей;
 - минимальная скорость вращения параллельно включенных двигателей;
- минимальная скорость вращения параллельно включенных двигателей;
 - ограничение по моменту, вырабатываемое в системе управления верхнего уровня, отличающийся тем, что задание на потокосцепление статора
- ограничение по моменту, вырабатываемое в системе управления верхнего уровня, отличающийся тем, что задание на потокосцепление статора  , подаваемое в блок DTC, определяется по заданной зависимости потокосцепления от задания на электромагнитный момент
, подаваемое в блок DTC, определяется по заданной зависимости потокосцепления от задания на электромагнитный момент  двигателя
двигателя  , предварительно рассчитанной из условия минимума тока статора с учетом насыщения двигателя, причем при включении двигателей под напряжение в первые моменты времени после включения задание на потокосцепление определяется в зависимости от времени для ускоренного в двигателе магнитного потока.
, предварительно рассчитанной из условия минимума тока статора с учетом насыщения двигателя, причем при включении двигателей под напряжение в первые моменты времени после включения задание на потокосцепление определяется в зависимости от времени для ускоренного в двигателе магнитного потока.
Использованная в данном способе система прямого управления моментом (Direct Torque Control, сокращенно DTC) (Козярук А.Е., Рудаков В.В. Системы прямого управления моментом в частотно-регулируемых электроприводах переменного тока/под ред. Народицкого А.Г. - СПб.: Санкт-Петербургская электротехническая компания, 2005. - 100 с.) обладает высоким быстродействием и весьма устойчива к возмущениям и неточности информации о переменных состояния объекта управления, что очень важно в тяговом электроприводе.
К отличительным особенностям DTC можно отнести наличие в системе (рис. 1):
- гистерезисных релейных регуляторов потокосцепления статора (РРп) и момента (РРм) асинхронного двигателя;
- электронной адаптивной модели двигателя (АМД) для вычисления текущих управляемых координат асинхронного двигателя (потокосцепления статора и электромагнитного момента) по значению фазных токов, напряжения в звене постоянного тока и коммутационной функции АИН;
- блока вычисления фазового сектора (БВФС), в котором в текущий момент времени находится вектор потокосцепления статора двигателя;
- табличного (матричного) вычислителя оптимального вектора напряжения двигателя, выполняемого в виде блока логического автомата (БЛА) и определяющего функцию переключения вентилей АИН.
Использование для вычисления фактических значений потокосцепления и момента только датчиков первого двигателя АТД_1 (рис. 1), а не двигателя с минимальной или максимальной скоростью вращения, по которой в данный момент ведется управление, позволяет избежать электромеханических колебаний, возникающих при переключении обратных связей из-за разброса параметров обмоток двигателей. При этом двигатель АТД_1 первой оси, имеющей наименьшую вертикальную нагрузку, наиболее склонен к буксованию и юзу, поэтому он наиболее часто имеет максимальную и минимальную скорость в режимах тяги и торможения соответственно, и именно его скорость используется для управления. Переключения на управление по скорости других двигателей, например двигателя второй оси АТД_2, происходят, например, при поочередном проезде осями масляного пятна, когда вторая ось наезжает на пятно, а первая уже выехала на чистые рельсы, в этом случае буксование и юз соответствующих осей также эффективно подавляются.
Примененная система DTC позволяет отдельно регулировать электромагнитный момент и поток двигателя с высоким быстродействием, что открывает возможность высокодинамичного регулирования двигателей, подключенных параллельно к одному инвертору, по одному из известных энергосберегающих законов: условию минимума тока статора. Для этого предварительно рассчитывается зависимость потокосцепления статора от электромагнитного момента двигателя с учетом насыщения, определяемая из условия получения заданных значений электромагнитного момента при минимальном токе статора. Рассчитанная зависимость реализуется в блоке задания потокосцепления  , размещенном непосредственно в системе управления двигателем (в системе управления нижнего уровня), и имеет вид кривой с насыщением (рис. 1). На вход блока задания потокосцепления подается задание на электромагнитный момент двигателя Мз, а с выхода снимается задание на потокосцепление статора, подаваемое в блок DTC.
, размещенном непосредственно в системе управления двигателем (в системе управления нижнего уровня), и имеет вид кривой с насыщением (рис. 1). На вход блока задания потокосцепления подается задание на электромагнитный момент двигателя Мз, а с выхода снимается задание на потокосцепление статора, подаваемое в блок DTC.
Так как при включении тяговых двигателей под напряжение после остановки или режима выбега задание на момент  нарастает постепенно от нуля, то и задание на потокосцепление статора будет нарастать постепенно в соответствии с зависимостью, приведенной в блоке задания потокосцепления (рис. 1). Это затягивает нарастание в двигателе магнитного потока и затрудняет регулирование. Поэтому в начальные моменты времени следует с целью форсирования создания в двигателе магнитного потока использовать формирование задания на потокосцепление в зависимости от времени
нарастает постепенно от нуля, то и задание на потокосцепление статора будет нарастать постепенно в соответствии с зависимостью, приведенной в блоке задания потокосцепления (рис. 1). Это затягивает нарастание в двигателе магнитного потока и затрудняет регулирование. Поэтому в начальные моменты времени следует с целью форсирования создания в двигателе магнитного потока использовать формирование задания на потокосцепление в зависимости от времени  , где
, где  - время, а затем переключаться на формирование задания на потокосцепление в зависимости от задания момента двигателя
- время, а затем переключаться на формирование задания на потокосцепление в зависимости от задания момента двигателя  .
.
Предлагаемый способ позволяет осуществить высокодинамичное регулирование момента тяговых двигателей, подключенных параллельно к одному инвертору, и предупреждение буксования (и юза) при энергоэффективном управлении АТД по критерию минимума тока статора, позволяющем уменьшить потребляемый ток в среднем на 7% и тем самым снизить потери энергии в двигателе и статическом преобразователе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ГИБКИМ ОГРАНИЧЕНИЕМ МОЩНОСТИ | 2015 |
|
RU2605458C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКОСЦЕПЛЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ В СОСТАВЕ ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ ПОЛЕОРИЕНТИРОВАННЫМ УПРАВЛЕНИЕМ ПРИ РАБОТЕ В ЗОНЕ ОГРАНИЧЕННОГО НАПРЯЖЕНИЯ | 2021 |
|
RU2759558C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Тяговый электропривод автономного транспортного средства | 1987 |
|
SU1588584A1 |
Изобретение относится к способам для управления тяговой системой транспортных средств с электротягой. Способ управления асинхронными тяговыми двигателями включает вычисление текущих значений электромагнитного момента и потокосцепления статора в блоке DTC (Direct Torque Control) по двигателю первой оси тележки. При этом вычисление задания на момент, подаваемого в блок DTC, ведется регулятором скорости с использованием сигналов максимальной или минимальной скорости вращения параллельно включенных асинхронных двигателей. В режиме тяги управление ведется по максимальной, а в режиме торможения - по минимальной скорости вращения. Задание на потокосцепление статора , подаваемое в блок DTC, определяется по заданной зависимости потокосцепления от задания на электромагнитный момент  двигателя
двигателя  , предварительно рассчитанной из условия минимума тока статора с учетом насыщения двигателя. При включении двигателей под напряжение в первые моменты времени задание на потокосцепление определяется в зависимости от времени. Технический результат заключается в обеспечении высокодинамичного регулирования момента тяговых двигателей и предупреждения буксования и юза. 1 ил.
, предварительно рассчитанной из условия минимума тока статора с учетом насыщения двигателя. При включении двигателей под напряжение в первые моменты времени задание на потокосцепление определяется в зависимости от времени. Технический результат заключается в обеспечении высокодинамичного регулирования момента тяговых двигателей и предупреждения буксования и юза. 1 ил.
Способ управления асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору, использующий прямое управление моментом (Direct Torque Control - DTC), в котором вычисление текущих значений электромагнитного момента и потокосцепления статора ведется в блоке DTC всегда только по двигателю первой оси тележки в соответствии с выражениями:
.
где и - потокосцепления первого двигателя по оси α и β соответственно;
и - напряжения статора параллельно включенных двигателей по оси α и β соответственно;
и - токи статора первого двигателя по оси α и β соответственно;
- сопротивление фазы обмотки статора первого двигателя, корректируемое с учетом изменения температуры обмотки;
- электромагнитный момент первого двигателя;
p - число пар полюсов;
- модуль вектора потокосцепления статора первого двигателя;
- фаза вектора потокосцепления статора первого двигателя;
а вычисление задания на момент, подаваемого в блок DTC, ведется регулятором скорости с использованием сигналов максимальной или минимальной скорости вращения параллельно включенных асинхронных двигателей: в режиме тяги управление ведется по максимальной, а в режиме торможения - по минимальной скорости вращения при использовании пропорционально-интегрального регулятора скорости, задание на момент Мз, поступающее в блок DTC, вычисляется по формулам:
- в режиме тяги
- в режиме торможения
и ограничивается на величине , в случае ее превышения,
где - коэффициент усиления пропорционального звена регулятора скорости;
- постоянная T
ω времени интегрального звена регулятора скорости;
- задание скорости вращения, поступающее из системы управления верхнего уровня и определяемое с учетом обеспечения оптимального проскальзывания колес;
- максимальная скорость вращения параллельно включенных двигателей;
- минимальная скорость вращения параллельно включенных двигателей;
- ограничение по моменту, вырабатываемое в системе управления верхнего уровня, отличающийся тем, что задание на потокосцепление статора , подаваемое в блок DTC, определяется по заданной зависимости потокосцепления от задания на электромагнитный момент двигателя , предварительно рассчитанной из условия минимума тока статора с учетом насыщения двигателя, причем при включении двигателей под напряжение в первые моменты времени после включения задание на потокосцепление определяется в зависимости от времени для ускоренного в двигателе магнитного потока.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| Быстродействующее детекторное направленное дистанционное реле | 1951 |
|
SU99390A1 |
| Способ контактной электросварки листов и изделий под давлением | 1951 |
|
SU96071A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| CN 102035456 A, 27.04.2011 | |||
| CN 103414423 A, 27.11.2013. | |||

