1зо
1зо
,77
7 №
8.Ъв8вк%хШ. I i i /С
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКАРНЫЙ САМОЦЕНТРИРУЮЩИЙ КЛИНОВОЙ ПАТРОН | 1990 |
|
SU1834110A1 |
| Токарный самоцентрирующий клиновой патрон | 1991 |
|
SU1814998A1 |
| Устройство для центрирования заготовки на планшайбе | 1990 |
|
SU1773571A1 |
| СПОСОБ КРЕПЛЕНИЯ ЗАГОТОВКИ ПРИ ТОКАРНОЙ ОБРАБОТКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2201847C2 |
| ТОКАРНЫЙ ПЛАВАЮЩИЙ ПАТРОН | 2010 |
|
RU2449862C2 |
| СПОСОБ УСТАНОВКИ ЗАГОТОВОК ДЕТАЛЕЙ ТИПА ДИСКОВ | 2010 |
|
RU2443513C1 |
| Привод зажимного патрона | 1988 |
|
SU1579642A1 |
| Токарный самоцентрирующий клиновой патрон | 1991 |
|
SU1825672A1 |
| Зажимное устройство к токарному станку | 1984 |
|
SU1234055A1 |
| Расточное устройство с механизмом подналадки резца | 1987 |
|
SU1468671A1 |
Использование: в приспособлениях для зажима деталей при обработке на станках токарной группы, преимущественно двух- шпиндельнс; кэмпонсзки, с оппозитно рас- поло, жыми шпиндельными бабками. Сущность изобрети имя: в корпусе 1 распо6 ложены основные кулачки 6 перемещающиеся от клинового штока 3. Механизм регулирования положения корпуса 1 относительно оси 2 шпинделя выполнен а виде диска, состоящего из основания 12, фланца 13 и базирующегося по отверстию 14 фланца диска 15, в пазах которого расположены наборы пьезопластин и механизм их фиксации, который выполнен в виде стакана 26, содержащим набор пьезопластин 27, которые взаимодействуют с втулкой 26, которая перемещается параляельно оси патрона и взаимодействует с основанием корпуса. 6 ил.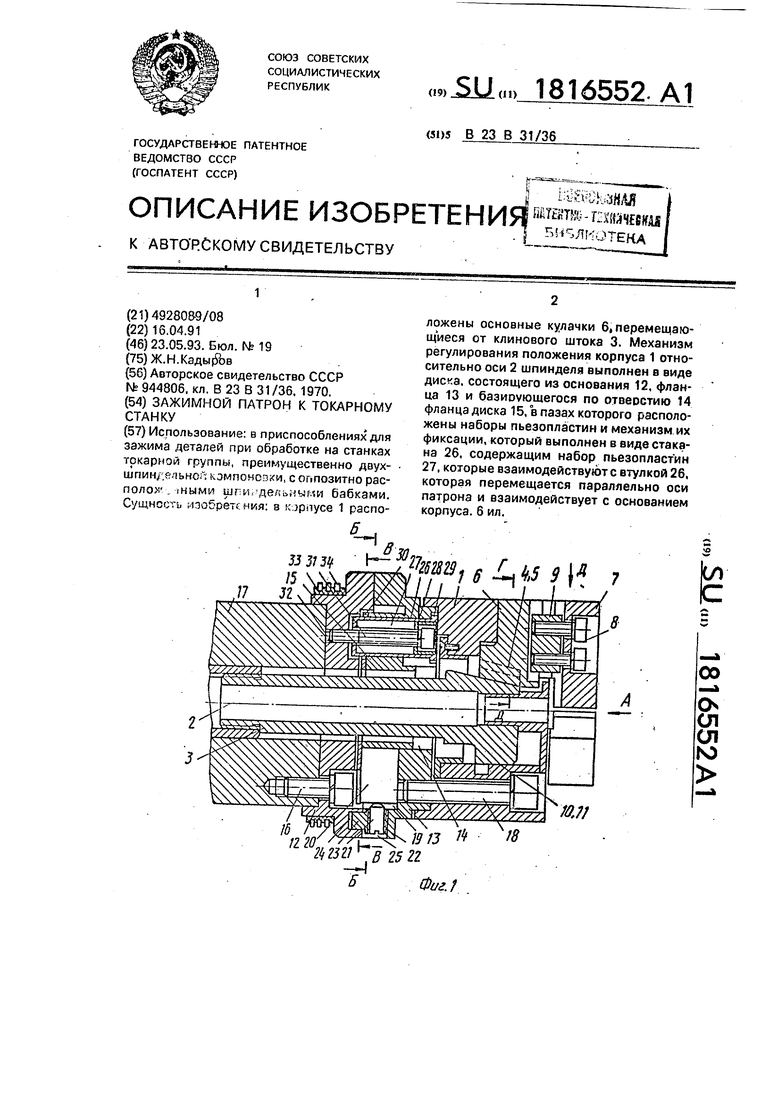
6
Фиг.1
Изобретение относится к приспособлениям для зажима заготовок при обработке на токарных станках.
Цель изобретения - повышение точности выверки детали.
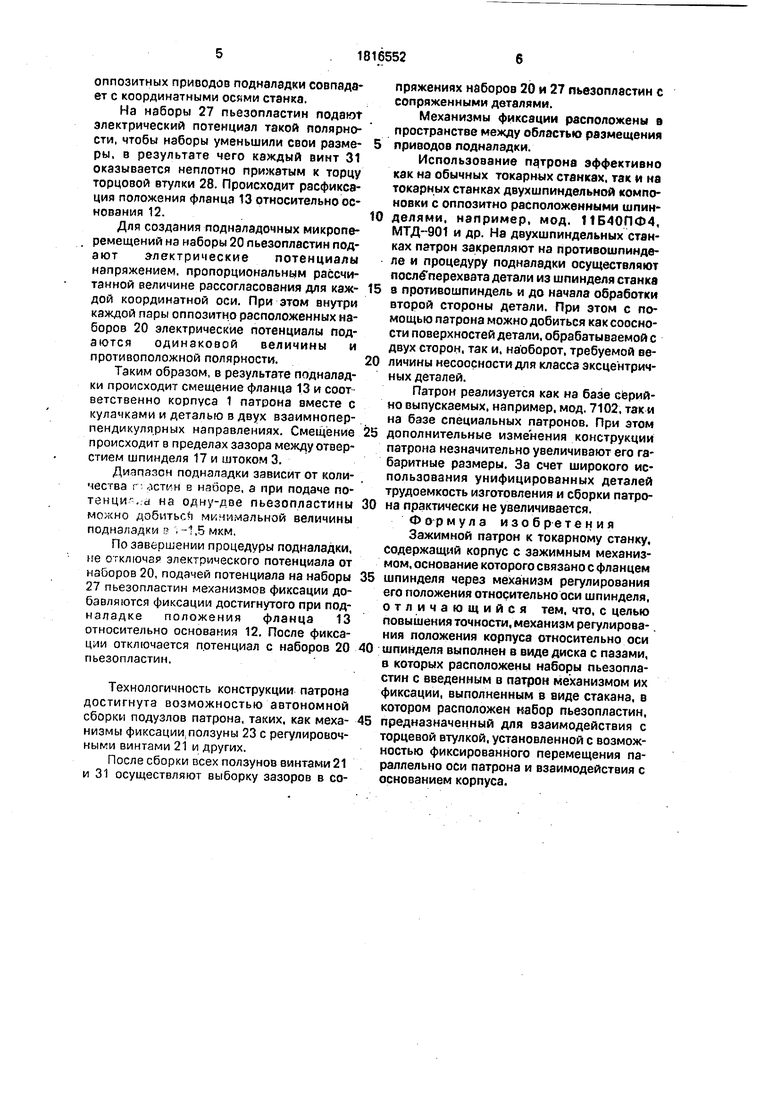
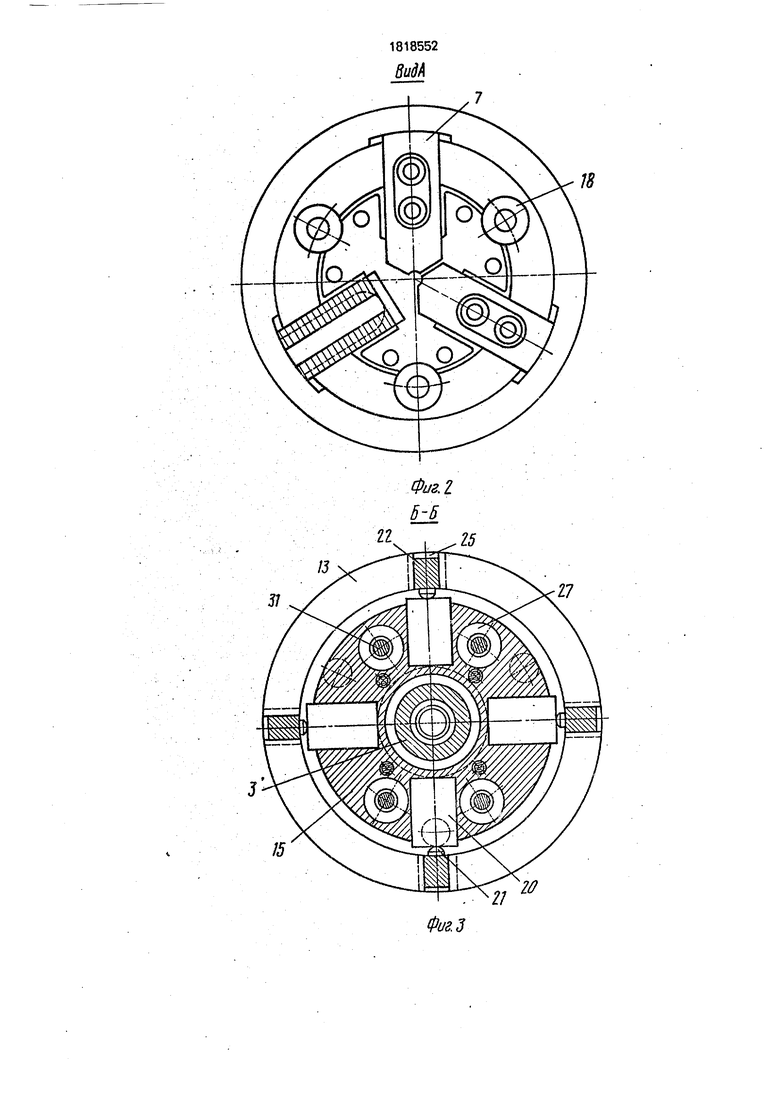
На фиг. 1 изображен предлагаемый патрон в осевом сечении, проходящем через ось одного привода подналадки и ось одного механизма фиксации; на фиг, 2 - вид А на фиг. 1 со снятым кулачком; на фиг. 3 - разрез Б-Б на фиг, 1; на фиг. 4 - разрез В-В на фиг.1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - вид Д на фиг.1.
Зажимной патрон содержит корпус 1 с зажимным механизмом и механизмом регулирования положения корпуса относительно оси 2 шпинделя. Зажимной механизм выполнен клиновым и состоит из штока 3, взаимодействующего через клиновую поверхность 4 с ответной поверхностью 5 ос- кулачков 6. Угол наклона поверхностей 4 и 5 равен 12.. В состав механизма входят также непосредственно взаимодействующие с зажимаемой заготовкой (не показана) три мягких кулачка 7, жестко связанных винтами 8 через сухари 9 с основными кулачками 6. Центрирование штока 3 внутри корпуса 1 при его осевых перемещениях осуществляется за счет взаимодействия сопряженных цилиндрических поверхностей 10 и 11, принадлежащих соответственно штоку 3 и корпусу 1. Механизм регулирования положения корпуса 1 относительно оси 2 шпинделя выполнен в виде сборного , состоящего из основания 12, фланца 13 и базирующегося по отверстию 14 фланца диска 15. Основание 12 винтами 16 жестко связано е выходным концом 17 шпинделя, а фланец 13 винтами жестко связан с корпусом 1, при этом фланец 13 с корпусом 1 имеют возможность поднала- дочных микроперемещений в направлении, перпендикулярном оси 2 шпинделя относительно основания 12. Для создания подна- ладочных микроперемещений в пазах 19 диска 15 размещены наборы 20 пьезопла- стин. Количество наборов 20 равно четырем и они расположены парами оппозитно во взаимно перпендикулярном направлении. Набор 20 пьезопластин является основой пьезопривода, в состав которого входят также регулировочный винт 21, ввинчиваемый в Т-образный выступ 22 ползуна 23. Ползун 23 своим прямоугольным выступом ориентирован в прямоугольном пазу 24 основания 12, а его Т-образный выступ 22 размещен в идентичном по форме пазу 25 фланца 13. При этом набор 20 пьезопластин ориентирован так, что одной своей плоской торцовой поверхностью внутри паза 19 в
диске 15 он взаимодействует с поверхностью диска 15, а противоположной плоской торцовой поверхностью он взаимодействует со сферической головкой винта 21,
Механизм фиксации (их количество равно количеству наборов пьезопластин) выполнен в виде .стакана 26, в котором расположены набор 27 пьезопластин и торцовая втулка 28. При этом стаканы ориентированы параллельно оси 2 шпинделя и размещены в отверстиях 29 и 30 соответственно фланца 13 и основания 12 так, что винты крепления 31, проходя через отверстия в наборе 27, взаимодействуют с резь5 бовым отверстием 32 основания-12, Такая конструкция механизма фиксации обеспечивает возможность взаимодействия (при подаче электрического потенциала) торцовой поверхности набора 27 пьезопластин с
0 поверхностью торцовой втулки 28 и в ре- . зультате ее смещения в направлении, параллельном оси 2 шпинделя с торцовой поверхностью винтов крепления 31 и соответственно с основанием 12, т.е. фиксирует5 ся достигнутое в результате подналадки смещение фланца 13 относительно основания 12.
Наборы 20 и 27 скомплектованы из серийно выпускаемых пьезопластин, при этом
0 набор 27 комплектуется из пластин-с отверстием.
Подвод энергии к наборам осуществляется многосекционным контактным токосъемником, состоящим из изоляционной
5 втулки 33, напрессованной на основание 12 и медных дисков 34, взаимодействующих с подпружиненными щетками (на фиг. не показаны). Наличие в составе патоона токосъемника обусловлено необходимостью
0 подвода электрического потенциала к наборам 27 пьезопластин механизмов фиксации при вращении патрона.
До начала зажима производят растачивание мягких кулачков 7 на размер зажима5 емой детали.
Зажимным патроном пользуются следующим образом.
С помощью измерительных устройств, например измерительных головок, опреде0 ляют фактическое положение оси детзли в кулачках патрона. Зная положение оси 2 шпинделя, с помощью вычислительного устройства находят величину и направление подналадочных микроперемещений для
5 каждого привода подналадки, обеспечивающие при их совместном перемещении совмещение оси детали с осью 2 шпинделя. Останавливают зажимной патрон в положении, при котором положение взаимно перпендикулярно расположенных пар
51816552 6
оппозитных приводов подналадки совпадв-пряжениях наборов 20 и 27 пьезопластин с
ет с координатными осями станка,сопряженными деталями.
На наборы 27 пьезопластин подаютМеханизмы фиксации расположены в
электрический потенциал такой полярно-пространстве между областью размещения
сти, чтобы наборы уменьшили свои разме- 5приводов подналадки.
ры, в результате чего каждый винт 31Использование патрона эффективно
оказывается неплотно прижатым к торцукак на обычных токарных станках, так и на
торцовой втулки 28. Происходит расфикса-токарных станках двухшпиндельной компоция положения фланца 13 относительно ос-новки с оппозитно расположенными шпин- нования 12. 10 делями. например, мод. Т1Б40ПФ4,
Для создания подналадочных микропе-МТД-901 и др. На двухшлиндельных станремещений на наборы 20 пьезопластин под-ках пэтрон закрепляют на противошпиндеают электрические потенциалыле и процедуру лодналадки осуществляют
напряжением, пропорциональным рассчи-после перехвэта детали из шпинделя станка танной величине рассогласования для каж- 15 а противошпиндель и до начала обработки
дои координатной оси. При этом внутривторой стороны детали. При этом с покаждой пары оппозитно расположенных на-мощью патрона можно добиться как соосноборов 20 электрические потенциалы под-сти поверхностей детали, обрабатываемой с
аются одинаковой величины идвух сторон, так и, на оборот, требуемой вепротивоположной полярности. 20личины несоосности для класса эксцентричТаким образом, в результате подналад-ных деталей.
ки происходит смещение фланца 1.3 и соотПатрон реализуется как на базе сёрийветственно корпуса 1 патрона вместе сно выпускаемых, например, мод. 7102, так и
кулачками и деталью в двух взаимнопер-на базе специальных патронов. При этом
пендикулярных направлениях. Смещение 25дополнительные изменения конструкции
происходит в пределах зазора между отвер-патрона незначительно увеличивают его гастием шпинделя 17 и штоком 3.баритные размеры. За счет широкого исДиапззсн подналадки зависит от коли-пользования унифицированных деталей
мества г; лстин в наборе, а при подаче по-трудоемкость изготовления и сборки патротенци :. а на одну-две пьезопластины 30на практически не увеличивается.
можно добиться минимальной величиныФормула изобретения
подналадки в .-1,5 мкм.Зажимной патрон к токарному станку,
По завершении процедуры подналадки,содержащий корпус с зажимным механиз- не отключая электрического потенциала отмом, основание которого связано с фланцем наборов 20, подачей потенциала на наборы 35шпинделя через механизм регулирования 27 пьезопластин механизмов фиксации до-его положения относительно оси шпинделя, бавляются фиксации достигнутого при под-отличающийся тем, что, с целью наладке положения фланца 13повышения точности, механизм регулирова-. относительно основания 12. После фикса-ния положения корпуса относительно оси ции отключается п.отенциал с наборов 20 40шпинделя выполнен в виде диска с пазами, пьезопластин.в которых расположены наборы пьезопластин с введенным в патрон механизмом их
Технологичность конструкции патронафиксации, выполненным в виде стакана, в достигнута возможностью автономнойкотором расположен набор пьезопластин, сборки подузлов патрона, таких, как меха- 45предназначенный для взаимодействия с низмы фиксации, ползуны 23 с регулировоч-торцевой втулкой, установленной с возможными винтами 21 и других.ностью фиксированного перемещения па- После сборки всех ползунов винтами 21раллельно оси патрона и взаимодействия с и 31 осуществляют выборку зазоров в со-основанием корпуса.
Фи г. 5
Составитель Ж.Кадыров Редактор Т.ЗубковаТехред М.Моргентал
Фиг. 6
Корректор С.Шекмар
| Зажимной патрон | 1970 |
|
SU944806A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
