с/ с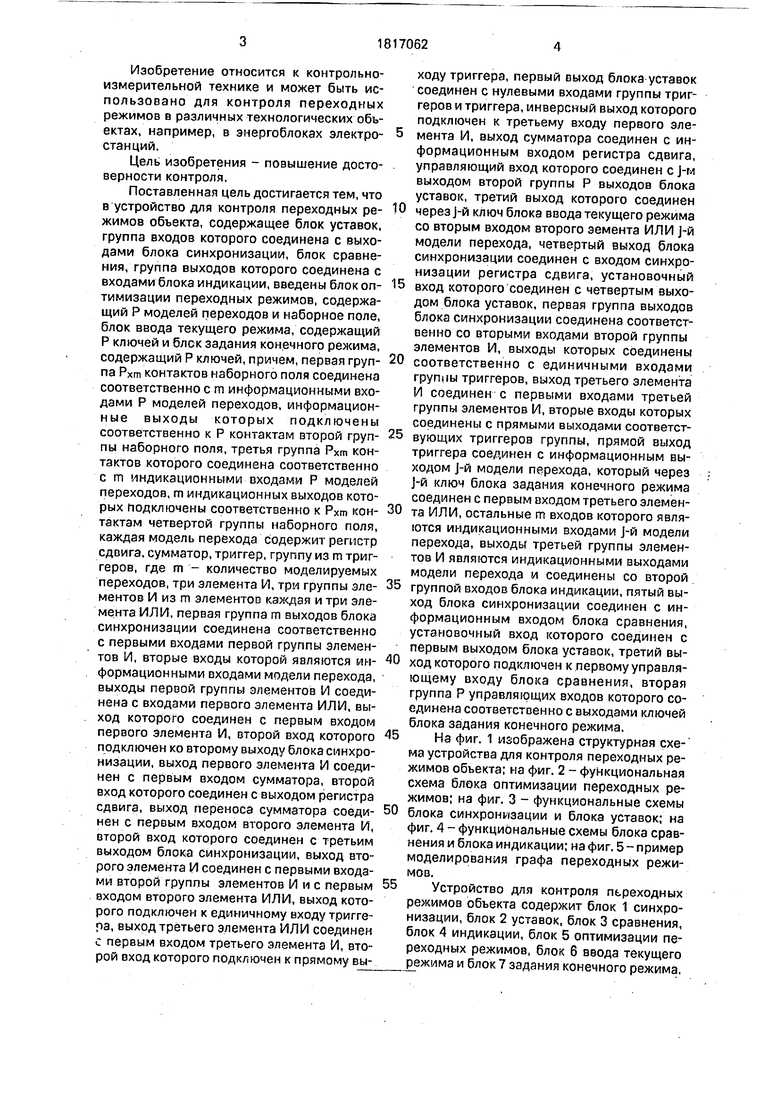



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования графов | 1985 |
|
SU1315993A1 |
| Устройство для моделирования графов | 1984 |
|
SU1246110A1 |
| Устройство для моделирования графов | 1986 |
|
SU1377867A2 |
| Устройство для моделирования графа | 1985 |
|
SU1278877A1 |
| Устройство для моделирования графов | 1989 |
|
SU1709346A2 |
| Устройство для допускового контроля параметров объектов | 1982 |
|
SU1056134A1 |
| Устройство для моделирования ветви графа | 1986 |
|
SU1348847A1 |
| Устройство для моделирования графов | 1986 |
|
SU1399755A1 |
| Устройство для контроля экспоненциальных процессов | 1990 |
|
SU1732331A1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |



Сущность изобретения: устройство cci- держит 1 блок синхронизации ({), 1 блбк уставок (2), 1 блок сравнения (3), 1 блок индикации (4), 1 блок оптимизации переход-, ных режимов (5), 1 блок ввода текущего режима (6), 1 блок задания конечного режима. 5 ил.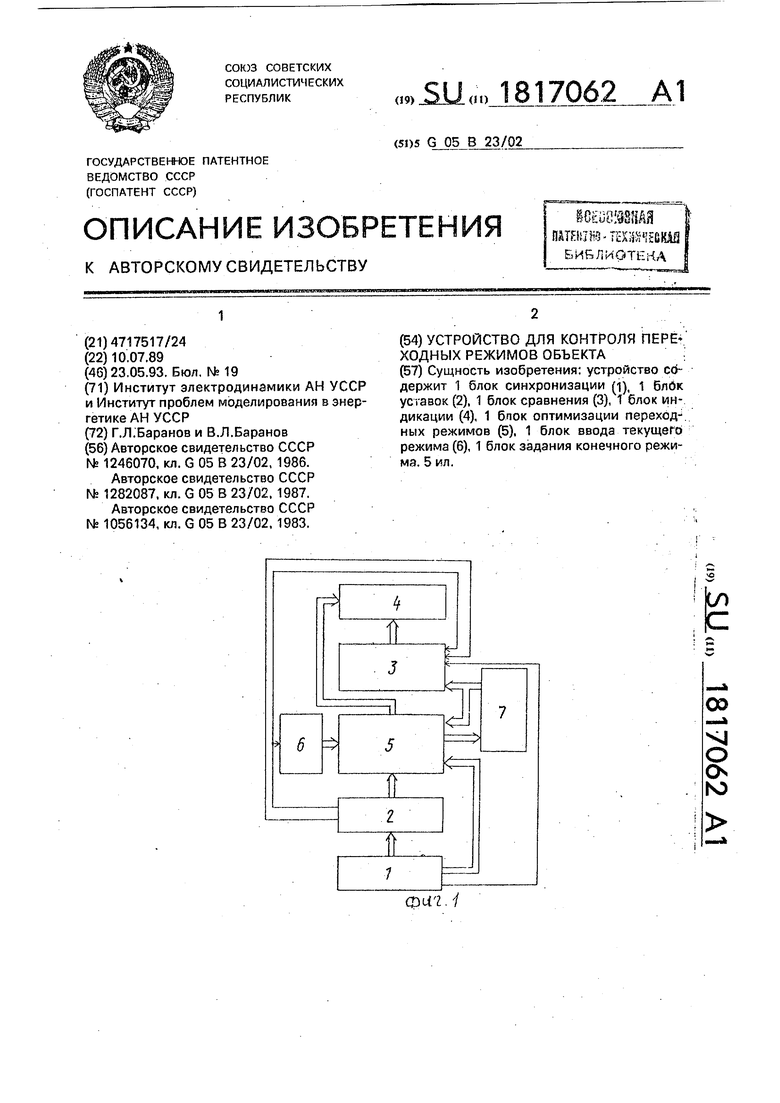
Г
00
шшД
4J о
ON Ю
Изобретение относится к контрольно- измерительной технике и может быть использовано для контроля переходных режимов в различных технологических объектах, например, в энергоблоках электростанций.
Цель изобретения - повышение достоверности контроля.
Поставленная цель достигается тем, что в устройство для контроля переходных режимов объекта, содержащее блок уставок, группа входов которого соединена с выходами блока синхронизации, блок сравнения, группа выходов которого соединена с входами блока индикации, введены блок оптимизации переходных режимов, содержащий Р моделей переходов и наборное поле, блок ввода текущего режима, содержащий Р ключей и блек задания конечного режима, содержащий Р ключей, причем, первая группа Рхт контактов наборного поля соединена соответственно с m информационными входами Р моделей переходов, информационные выходы которых подключены соответственно к Р контактам второй группы наборного поля, третья группа Рхт контактов которого соединена соответственно с m индикационными входами Р моделей переходов, m индикационных выходов которых подключены соответственно к РХт контактам четвертой группы наборного поля, каждая модель перехода содержит регистр сдвига, сумматор, триггер, группу из m триггеров, где m - количество моделируемых переходов, три элемента И, трм группы элементов И из m элементов каждая и три элемента ИЛИ, первая группа m выходов блока синхронизации соединена соответственно с первыми входами первой группы элементов И, вторые входы которой являются информационными входами модели перехода, выходы первой группы элементов И соединена с входами первого элемента ИЛИ, выход которого соединен с первым входом первого элемента И, второй вход которого подключен ко второму выходу блока синхронизации, выход первого элемента И соединен с первым входом сумматора, второй вход которого соединен с выходом регистра сдвига, выход переноса сумматора соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом блока синхронизации, выход второго элемента И соединен с первыми входами второй группы элементов И и с первым входом второго элемента ИЛИ, выход которого подключен к единичному входу триггера, выход третьего элемента ИЛИ соединен с первым входом третьего элемента И, второй вход которого подключен к прямому выходу триггера, первый выход блока уставок соединен с нулевыми входами группы триггеров и триггера, инверсный выход которого подключен к третьему входу первого элемента И, выход сумматора соединен с информационным входом регистра сдвига, управляющий вход которого соединен с J-M выходом второй группы Р выходов блока уставок, третий выход которого соединен
через j-й ключ блока ввода текущего режима со вторым входом второго эемента ИЛИ j-й модели перехода, четвертый выход блока синхронизации соединен с входом синхронизации регистра сдвига, установочный
5 вход которого соединен с четвертым выходом блока уставок, первая группа выходов блока синхронизации соединена соответственно со вторыми входами второй группы элементов И, выходы которых соединены
0 соответственно с единичными входами группы триггеров, выход третьего элемента И соединен с первыми входами третьей группы элементов И, вторые входы которых соединены с прямыми выходами соответст5 вующих триггеров группы, прямой выход триггера соединен с информационным выходом j-й модели перехода, который через J-й ключ блока задания конечного режима соединен с первым входом третьего элемен0 та ИЛИ, остальные m входов которого являются индикационными входами j-й модели перехода, выходы третьей группы элементов И являются индикационными выходами модели перехода и соединены со второй
5 группой входов блока индикации, пятый выход блока синхронизации соединен с информационным входом блока сравнения, установочный вход которого соединен с первым выходом блока уставок, третий вы0 ход которого подключен к первому управляющему входу блока сравнения, вторая группа Р управляющих входов которого соединена соответственно с выходами ключей блока задания конечного режима.
5 На фиг. 1 изображена структурная схема устройства для контроля переходных режимов объекта; на фиг. 2 - функциональная схема блока оптимизации переходных режимов; на фиг. 3 - функциональные схемы
0 блока синхронизации и блока уставок; на фиг. 4 - функциональные схемы блока сравнения и блока индикации; на фиг. 5 - пример моделирования графа переходных режимов.
5 Устройство для контроля пьреходных режимов объекта содержит блок 1 синхронизации, блок 2 уставок, блок 3 сравнения, блок 4 индикации, блок 5 оптимизации переходных режимов, блок 6 ввода текущего режима и блок 7 задания конечного режима.
Блок 5 оптимизации переходных режимов содержит Р моделей перехода, каждая из которых содержит регистр 8 сдвига, сумматор 9, триггер 10, группу триггеров 11(1)- 11(т), три элемента И 12-14, три группы элементов И 15(1}-15(т), 16{1)-16(т). 17(1)- 17(т), три элемента ИЛИ 18-20 и наборное поле, состоящее из первой группы Р наборов контактов 21(1)-21(т), из второй группы Р контактов 22, из третьей группы Р наборов контактов 23(1) -23(т) и из четвертой группы Р наборов контактов 24(1}-24(т), где Р - количество моделей перехода (фиг. 2).
Блок 1 синхронизации (фиг. 3) содержит генератор 25 импульсов, два распределите- ля 26 и 27 импульсов и элемент И 28. Блок 2 уставок (фиг. 3) содержит генератор 29 одиночных импульсов, коммутаторы 30-34, триггер 35, два элемента ИЛИ 36 и 37, элемент И 38 и элемент НЕ 39.
Блок 3 сравнения (фиг. 4) содержит счетчик 40. узел 41 сравнения кодов, коммутатор 42, два триггера 43 и 44, элементы И 45, 46, элементы ИЛИ 47, 48, два элемента 49 и 50 задержки, элемент НЕ 51 и элемент 52 ин- дикации, информационный вход 53, управляющий вход 54, группу управляющих входов 55(1)-55(Р), где Р - количество моделей перехода, и установочный вход 56.
Блок 4 индикации (фиг. 4) содержит узел 57 десятичной индикации и группу элементов 58(1.1)-58(Р.т) индикации.
Здесь цифрами в скобках, следующими за номером позиции, обозначены порядковые номера одинаковых по техническому исполнению блоков, узлов и элементов. Цифрами в скобках, стоящими у контура соответствующего блока, узла и элемента, по- казаны порядковые номера входов и выходов этого блока, узла или элемента.
Устройство для контроля переходных режимов объекта работает следующим образом.
Предварительно составляется характеристика объекта, в виде графа (фиг. 5,а) вер- шинам которого сопоставляются возможные режимы работы объекта. Направленные ветви графа, соединяющие соседние вершины графа моделируют процесс перехода объекта из одного режи- ма работы в другой. Процесс перехода объекта из одного режима работы в другой сопровождается затратами материальных ресурсов, которые можно выразить в виде расхода топлива, энергии, приведенными затратами в стоимостном выражении и т.п. Каждой ветви графа приписываем длину (или вес) пропорциональный затратам материальных ресурсов на перевод объекта из одного режима работы в другой режим. На
фиг. 5,а изображена характеристика объекта в виде графа, содержащего три вершины. Пусть текущий режим работы объекта соответствует вершине Si графа, а объект необходимо перенести в режим работы, которому соответствует вершина 5з.
В данном примере имеется два варианта перевода объекта из режима Si в режим 8з. Можно перевести объект из режима Si в режим S2, а затем в режим 5з. Возможен также вариант непосредственного перевода объекта из режима St в режим 5з. Этим двум вариантам перевода объекта из текущего режима Si в заданный 5з соответствуют различные затраты материальных ресурсов, которые в первом случае характеризуются суммарной длиной (или весом) ветвей SiSa и 525з, а во втором случае - длиной ветви SiSs. Если характеристика объекта в виде графа содержит большое количество вершин и ветвей, то возникает значительное количество вариантов перевода объекта из текущего режима в заданный. Так как каждый вариант определяет соответствующие затраты материальных ресурсов, то целесообразно найти такой вариант перевода объекта в требуемый режим работы, который характеризуется минимальным значением затрат материальных ресурсов.
Произвольный вариант перевода объекта в заданный режим не всегда реализуем, так как располагаемые материальные ресурсы могут быть меньше, чем затраты, не- обходимые для перевода объекта в заданный режим работы.
Таким образом, ставится задача контроля переходных режимов объекта на соответствие располагаемым ресурсам, которая решается устройством путем распределения последовательности переходов режимов объекта с минимальными материальными затратами и сравнения их с располагаемыми материальными ресурсами. Эта задача решается следующим образом. Каждый фрагмент графа переходов, содержащий одну вершину с m входящими в него ветвями, моделируется моделью перехода (фиг. 5. б), которые соединяются между собой согласно топологии моделирующего графа. Модель перехода изображена на фиг. 2. Совокупность моделей перехода совместно с наборным полем для коммутации топологии моделируемого графа образует блок 5 оптимизации переходных режимов (фиг. 1). Параметры ветвей графа (длина ветви или ее вес) задаются блоком 2 уставок по сигналам блока 1 синхронизации. Блок 6 ввода текущего режима, представляющий собой набор ключей, задэет вершину графа, соответствующую текущему
режиму работы объекта. Блок 1 задания конечного режима, состоящий из набора ключей, задает вершину конечного режима работы, в который необходимо перевести объект.
Блок 5 оптимизации переходных режимов решает задачу выбора оптимальной последовательности переходов объекта, связывающей текущий режим работы с требуемым. Блок 3 сравнения сравнивает минимальные материальные затраты вдоль оптимальной последовательности переходов режимов объекта с располагаемыми ма- териальными ресурсами и результат сравнения предъявляется человеку-оператору с помощью блока 4 индикации, который отображает также оптимальную последовательность переходов из текущего режима работы объекта в заданный. Такой алгоритм контроля переходных режимов объекта устройство реализует следующим образом.
Генератор 25 импульсов блока 1 сихро- низации (фиг. 3) вырабатывает последовательность тактовых импульсов частоты f, из которых распределитель 26 импульсов формирует п последовательностей импульсов частоты f/n, где п - количество двоичных разрядов представления длины (веса) ветви графа. Между последовательностями импульсов, действующих на выходах соседних разрядов распределителя 26 импульсов, имеется сдвиг на время 1/f. Из последовательности импульсов n-го разряда распределителя 26 импульсов распределитель 27 импульсов формирует m последовательностей импульсов длительностью n/f, действующих с частотой f/nvn и сдвинутых друг относительно друга на время n/f, где m - количество ветвей, входящих в вершину графа. С помощью элемента И 28 формируют последовательность импульсов, совпадающую с одновременным действием импульсов на выходах n-го разряда распределителя 26 импульсов и in-ro разряда распределителя 27 импульсов. Все последовательностиимпульсов, формируемые блоком 1 синхронизации предназначены для согласования работы всех блоков устройства.
Параметры графа переходов объекта вводятся в блок 5 оптимизации переходных режимов с помощью блока 2 уставок. Этот режим ввода параметров графа устанавливается с помощью коммутатора 32 блока 2 уставок (фиг. 3), который подключает выход генератора 29 одиночных импульсов к единичному входу триггера 35. С помощью коммутатора 33 выбирается одна модель перехода блока 5 оптимизации переходных
режимов, которая моделирует один фрагмент графа в виде вершины с m входящими в нее ветвями. С помощью коммутаторов 30 и 31 блока 2 уставок задаются соответственно дополнительный двоичный код длины (веса) ветви и ее порядковый номер. Коммутатором 30 подключают в единичных разрядах дополнительного двоичного кода длины (веса) ветви соответствующие разряды распределителя 26 импульсов блока 1 синхронизации к входам элемент ИЛИ 36 блока 2 уставок, на выходе которого формируется последовательный код длины (веса) ветви графа переходов режимов объекта, Изпример, если затраты материальных ресурсов на перевод режима работы объекта в направлении данной ветви графа оцениваются пятью единицами стоимости, то, подключая коммутатором 30 выходы всех
разрядов, кроме третьего разряда, распределителя 26 импульсов к входам элемента ИЛИ 36, на его выходе получим последовательный дополнительный код пяти 11...1011. Коммутатором 31 задают номер I
ветви графа, 1 1,2, .,,, т, а коммутатором 33 выбирают номер j модели перехода, j 1, 2,..., Р, где Р - количество моделей перехода, используемых для моделирования графа переходов режимов объекта, Коммутатором
31 выбирают номер 1-й ветви графа, который соответствует 1-му номеру разряда распределителя 27 импульсов. Например, если устанавливается длина седьмой ветви графа, то выход седьмого разряда распределителя
27 импульсов подключается к входу элемента ИЛИ 37, Если устанавливаются-парамет- ры ветвей графа, моделируемых моделью перехода № 2, то выход элемента И 38 подключается коммутатором 33 к управляющему входу регистров 8 сдвига модели перехода № 2. Ввод последовательного дополнительного кода длины (веса) ветви графа в гггп-разрядный регистр 8 сдвига осуществляется после подачи единичного
сигнала с выхода элемента Н Е 39 через коммутатор 34 на управляющий вход генератора 29 одиночных импульсов, который выделяет из последовательности импульсов элемента И 28 действующих с частотой
0 f/nvn, одиночный импульс, устанавливающий через коммутатор 32 триггер 35 в единичное состояние на время rrrn/f. Триггер 35 устанавливается в нулевое состояние следующим импульсом последовательности
5 сигналов элемента И 28. Триггер 35 в единичном состоянии открывает сигналом прямого выхода элемент И 38, через который на управляющий вход регистра 8 сдвига посту;- пает одиночный импульсный сигнал с выхода элемента ИЛИ 37, задающий номер ветви фрагмента графа. Под действием тактовых импульсогв генератора 25 импульсов блока 1 синхронизации последовательный п-раз- рядный дополнительный код длины (веса) ветви графа записывается с выхода элемента ИЛИ 36 блока 2 уставок последовательно во времени, начиная с младших разрядов, в регистр 8 сдвига той модели перехода, номер которой установлен на коммутаторе 33, во время действия на выходе элемента ИЛИ 37 импульса, задающего номер ветви. Аналогичным образом в регистры 8 сдвига всех моделей перехода записывают дополнительные коды длины (веса) всех ветвей моделируемого графа переходов режимов объекта. Затем с помощью наборного поля блока 5 оптимизации переходного режима формируют топологию моделируемого графа. На примере, изображенном на фиг. 5, б топология моделируемого графа набирается следующим образом. Информационный выход 22 модели перехода № 1 соединяется с информационным входом 21(1) модели перехода № 2 и информационным входом 21 (1) модели перехода Ms 3. С целью формирования цепей индикации этих связей индикационный выход 24(1) моделей перехода № 2 и индикационный выход 24(1) модели перехода № 3 соединяются соответственно с индикационными входами 23(1) и 23(2) модели перехода № 1. Информационный выход 22 модели перехода № 2 соединяется с информационным входом 21(т) модели перехода № 3, индикационный выход 24(т) которой соединяется с индикационным входом 23(1) модели перехода Мз 2. Аналогичным образом формируется более сложная топология моделируемого графа. Неиспользованные в процессе набора топологии графа информационные входы 21 и индикационные входы 23 моделей перехода соединяются с входами логического нуля устройства.
В режиме контроля переходных режимов объекта ключами 6(j) и 7Q), j 1, 2, 3,.... Р задают соответственно текущий и требуемый режим работы объекта. На примере, .изображенном на фиг. 5, в модели перехода № 1 замыкают ключ 6(1) так как текущий режим работы объекта соответствует вершине SL Требуемый режим работы объекта соответствует вершине Зз, поэтому в модели перехода № 3 замыкается ключ 7(3). Устройство устанавливается в режим контроля объекта после подключения коммутатором 32 блока 2 уставок выхода генератора 29 одиночных импульсов к информационным входам всех ключей блока б ввода текущего режима. Пуск устройства осуществляется
коммутатором 34 блока 2 уставок, с по- . мощью которого возбуждается генератор 29 одиночных импульсов, формирующий одиночный импульс из последовательности им- 5 пульсов элемента И 28. Одиночный импульс генератора 29 одиночных импульсов блока 2 уставок поступает через коммутатор 32 и ключ 6Q) модели перехода, содержащую вершину Sj графа текущего режима работы
0 объекта, на вход элемента ИЛИ 19 (фиг. 2). На выходе элемента ИЛИ 19 формируется единичный сигнал, устанавливающий триггер 10 в единичное состояние. Единичный сигнал прямого выхода триггера 10 поступа5 ет на информационный выход 22 и согласно топологии моделируемого графа, набранной на наборном поле на информационные входы 21(1)-21(т) других моделей перехода. На примере, изображенном на фиг. 5 еди0 ничный сигнал информационного выхода 22 модели перехода № 1 поступает на информационные входы 21(1) моделей перехода № 2 и № 3.
Рассмотрим работу модели перехода №
5 2, на информационный вход 21(1) которой поступает единичный сигнал. Через элемент И 15(1) проходит последовательность импульсов первого разряда распределителя 27 импульсов блока 1 синхронизации, кото0 рая через элемент ИЛИ 18 управляет элементом И 12, пропускающим последовательность имульсов первого разряда распределителя 26 импульсов блока 1 синхронизации во время фазы сдвига под
5 действием тактовых импульсов дополнительного кода длины первой ветви с выхода регистра 8 сдвига. Сумматор 9 выполняет последовательно во времени, начиная с младших разрядов, суммирование дополни0 тельного кода длины первой ветви с последовательностью единиц младшего разряда, представленных последовательностью импульсов выхода элемента И 12, За время m.n тактов дополнительный код длины первой
5 ветви увеличивается на единицу младшего разряда и результат с выхода суммы сумматора 2 записывается под действием тактовых импульсов генератора 25 импульсов блоки 1 синхронизации в регистр 8 сдвига.
0 Спустя время Ivm-n тактов, где И - длина первой ветви, сумматором 9 формируется сигнал переноса из n-го разряда, который через элемент И 13, тактируемый последовательностью импульсов n-го разряда рас5 пределителя 26 импульсов, поступает через элемент ИЛИ 19 на единичный сход триггера 10 и через.элемент И 16(1), открытый в это время сигналом первого разряда распределителя 27 импульсов блока 1 синхронизации, на единичный вход триггера 11(1). В
результате триггер 10 и триггер 11(1), запоминающий номер первой ветви, устанавливаются в единичные состояния. Триггер 10 в единичном состоянии блокирует сигналом инверсного выхода элемент И 12 и процесс суммирования в сумматоре 9 прекращается. Рассмотрим работу модели перехода, когда на все ее информационные входы 21(1)-21(т) одновременно поступают единичные сигналы с информационных выходов 22 других моделей перехода. В этом случае через элементы И 15(1)-15(т) и ИЛИ 18 поступают последовательности импульсов всех разрядов распределителя 27 импульсов блока 1 синхронизации, которые открывают элемент И 12. Последовательность импульсов первого разряда распределителя 26 импульсов блока 1 синхронизации поступает через элемент V 12 на вход сумматора 2 во время сдвига под действием тактовых импульсов дополнительных кодов длины всех m ветвей, записанных в регистре 8 сдвига. Каждые rrrn тактов дополнительные коды длины m ветвей последовательно во времени, начиная с младших разрядов, увеличиваются на единицу младшего разряда и с выхода суммы сумматора 9 вновь записываются под действием тактовых импульсов в регистр 8 сдвига. Спустя время Irrrrn тактов, где li - наименьшая длина ветви из m ветвей, принадлежащая 1-й ветви, на выходе переноса суммматора 9 из текущего дополнительного кода длины 1-й ветви сформируется сигнал переноса из n-го разряда, который через элементы И 13, ИЛИ 19 и И 13, И 16(1) поступают соответственно на единичные входы триггеров 10 и 11(1), устанавливая их в единичные состояния. Триггер 11(1) запоминает номер ветви, принадлежащий дереву кратчайших путей на моделируемом графе. Триггер 10 в единичном состоянии возбуждает по информационному выходу 22 другие модели перехода, связанные своими информационными оходами 21(1)-21(т) с выходом 22 рассматриваемой модели перехода. Следующие модели перехода блока 5 оптимизации переходных режимов работают аналогичным образом до тех пор, пока не установится в единичное состояние триггера 10 в модели перехода, содержащий вершину графа требуемого режима работы объекта. В этом случае процесс поиска оптимальной последовательности переходов из текущего режима работы объекта в требуемый завершается и начинается процесс индикации этой последовательности переходов вдоль кратчайшего пути на моделируемом графе, который распространяется в обратном порядке от вершины графа требуемого режима работы объекта к вершине графа текущего режима следующим образом.
Единичный сигнал прямого выхода
триггера 10 модели перехода, содержащей вершину графа требуемого режима работы объекта, поступает через ключ 7(j) блока 7 задания конечного режима на вход элемента ИЛИ 20 этой же модели перехода. Так как
триггер 10 в этой модели перехода находится в единичном состоянии, то единичный сигнал с выхода элемента ИЛИ 20 поступает через элемент И 14 на входы группы элементов И 17(1)-17(т), вторые входы которых управляются триггерами 11(1)-11(т). Из всей группы элементов И 17(1)-17(т) откроется элемент триггера И 17(q) той ветви, q-й номер которой хранит триггер 11(q) в единичном состоянии. Единичный сигнал прямого
выхода 11(q), хранящего номер q-й ветви, принадлежащей кратчайшему пути на графе, проходит через соответствующий элемент И 17(q) на индикационный выход 24(q) и с помощью соответствующего элемента
58Q,q) индикации блока А индикации отображает принадлежность q-й ветви j-й модели перехода к кратчайшему пути на моделируемом графе или к оптимальной последовательности переходов из текущего режима
работы объекта в требуемый, Далее единичный сигнал индикационного выхода 24(q) J-й модели перехода поступает на индикационные входы 23(1)-23(т) предыдущих моделей перехода согласно топологии моделируемого графа и распространяется аналогичным образом по цепочке моделей перехода, принадлежащих кратчайшему пути моделируе- , кого графа, до тех пор, пока не достигнет модели перехода, содержащую вершину
графа текущего режима работы объекта. В этом случае процесс оптимальной последовательности переходов режимов работы объекта из текущего режима в требуемый завершается, а элементы 58 индикации блока 4 индикации отображают оптимальную
последовательностью изменения режимов
.- работы объекта, которая дает минимальные
материальные затраты на перевод текущего
режима работы объекта в требуемый. Контроль за реализуемостью оптимальной после- довательности режимов объекта осуществляется блоком 3 сравнения следующим образом.
В исходном состоянии на коммутаторе
5 42 устанавливается двоичнодесятичный код 8-4-2-1 величины располагаемых материальных ресурсов на перевод объекта в требуемый режим работы. Во время записи дополнительных кодов в регистры 8 сдвига
мрдопей перехода одиночный импульс генератора 29 одиночных импульсов блока 2 ус- тавок через коммутатор 32 поступает на установочный вход 56 блока 3 сравнения и устанавливает в нулевые состояния триггера 43, 44 и счетчик 40.
В режиме контроля переходных режимов объекта после пуска устройства с помощью коммутатора 34 блока 2 уставок одиночный импульс, формируемый генератором 29 одиночных импульсов поступает через коммутатор 32 на выход (3) блока 2 уставок и управляющий вход 54 блока 3 сравнения. Этот импульс задерживается элементом 49 задержки на длительность тактового импульса и устанавливает триггер 43 в единичное состояние, который открывает сигналом прямого выхода элемент И 45. После этого на информационный вход счетчика 40 начинает поступать через элемент И 45 последовательность импульсов, формируемая на выходе элемента И 28 блока 7 синхронизации, которая действует на информационном входе 53 блока 3 сравнения. В счетчике 40 осуществляется формирование двоичнодесятичного кода 8- 4-2-1 пропорционального количеству импульсов, поступающих с выхода элемента И 28 блока 1 синхронизации с частотой f/m -п.. Так как один импульс частоты f/m n представляет единицу длины (веса) ветви графа, то в счетчике 40 суммируется длина ветвей вдоль кратчайшего пути графа, которая пропорциональна затратам материальных ресурсов на перевод объекта из текущего режима работы в заданный. Счет в счетчике 40 прекращается как только устанавливается в единичное состояние триггер 10 модели перехода, содержащей вершину графа требуемого режима работы объекта. В этом случае единичный сигнал прямого выхода триггера 10 поступает через ключ блока 7 задания конечного режима на один из управляющих входов 55(1)-55(Р) блока 3 сравнения и через элемент ИЛИ 48 устанавливает триггер 43 в нулевое состояние, при котором бокируется элемент И 45. В счетчике 40 фиксируется двоично-десятичный код величины материальных затрат, необходимых для перевода объекта из текущего режима работы в требуемый. Индикация в десятичном виде состояния счетчика 40 осуществляется узлом 57 десятичной мн- дикации блока 4 индикации. В том случае, когда располагаемые материальные ресурсы, величина которых установлена на коммутаторе 42, меньше минимально необходимых материальных затрат двомч- нодесятичный код счетчика 40 достигает равенство с двоично-десятичным кодом на
выходе коммутатора 42 до момента установки триггера 43 в нулевое состояние. Равенство кодов счетчика 40 и коммутатора 42 выделяет узел 41 сравнения кодов, на выхо- 5 де которого формируется единичный сигнал, открывающий элемент И 46. Следующий импульс последовательности импульсов, действующий на информационном входе 53 блока 3 сравнения через эле0 мент И 45, элемент 50 задержки на длительность тактового импульсова, элементы И 46, ИЛИ 47 проходит на вход сброса счетчика 40 и устанавливает его в нулевое состояние. Этот же импульс поступает с вы5 хода элемента И 46 на единичный вход триггера 44 и устанавливает его в единичное состояние, при котором срабатывает элемент 52 индикации о том, что располагаемые материальные ресурсы меньше
0 минимально необходимых для перевода объекта из текущего режима работы в требуемый. Так как в рассматриваемом случае триггер 43 остается в единичном состоянии, то после установки счетчика 40 в нулевое
5 состояние следующие импульсы, действующие на информационном входе 53 блока 3 сравнения начнут формировать двоично-десятичный код величины превышения минимально необходимых материальных
0 ресурсов над располагаемыми. Процесс счета в рассматриваемом случае завершается после установки триггера 43 в нулевое состояние, когда установится в единичное состояние триггер 10 модели перехода, со5 держащую вершину графа требуемого режима работы объекта. В этом случае единичный сигнал прямого выхода триггера 10 поступает через ключ блока 7 задания конечного режима на один из управляющих
0 входов 55(1)-55(Р) и через элемент ИЛИ 48 устанавливает триггер 43 в нулевое состояние. В счетчике 40 фиксируется величина превышения минимально необходимых затрат над располагаемым, которая предъяв5 ляется человеку-оператору с помощью узла 57 десятичной индикации блока 4 индикации.
Формула изобретения Устройство для контроля переходных ре0 жимов объекта, содержащее блок уставок, группа входов которого соединена с выходами блока синхронизации, блок сравнения, группа выходов которого соединена с входами блока индикации, отличаю5 щ е е с я тем, что, с целью повышения достоверности контроля, в устройство введены блок оптимизации переходных режимов, содержащий Р моделей переходов и наборное поле, блок ввода текущего режима, содержащий Р ключей, и блок задания конечного
режима, содержащий Р ключей, первая группа Ртп контактов наборного поля соединена соответственно с m информационными входами Р моделей переходов, информационные выходы которых подключены соответственно к Р контактам второй группы наборного поля, третья группа Р-т контактов которого соединена соответственно с m индикаторными входами Р моделей переходов, m индикационных выходов которых подключены соответственно к Ртп контактам четвертой группы наборного поля, каждая модель перехода содержит регистр сдвига, сумматор, триггер, группу из m триггеров, где m - количество моделируемых переходов, три элемента И, три группы элементов И из m элементов каждая и три элемента ИЛИ, первая группа m выходов блока синхронизации соединена соответственно с первыми входами первой группы элементов И, вторые входы которой являются информационными входами модели перехода, выходы первой группы элементов И соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом первого элемента И, второй вход которого подключен к второму выходу блока синхронизации, выход первого элемента И соединен с первым входом сумматора, второй вход которого соединен с выходом регистра сдвига, выход переноса сумматора соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом блока синхронизации, выход второго элемента И соединен с первыми входами второй группы элементов И и с первым входом второго элемента ИЛИ, выход которого подключен к единичному входу триггера, выход третьего элемента ИЛИ соединен с первым выходом третьего элемента И, второй вход которого подключен к прямому выходу триггера, первый выход блока уставок соеднен с нулевыми входами группы триггеров и триггера, инверсный выход которого подключен к третьему входу первого элемента И, выход сумматора соединен с
информационным входом регистра сдвига, управляющий вход которого соединен с J-M выходом второй группы Р выходов блока уставок, третий выход которого соединен через J-й ключ блока ввода текущего режима
с вторым входом второго элемента ИЛИ J-й модели перехода, четвертый выход блока синхронизации соединен с входом синхронизации регистра сдвига, установочный вход которого соединен с четвертым выходом блока уставок, первая группа выходов блока синхронизации соединена соответственно с вторыми входами второй группы элементов И, выходы которых соединены соответственно с единичными входами
группы триггеров, выход третьего элемента И соединен с первыми входами третьей группы элементов И, вторые входы которых соединены с прямыми выходами соответствующих триггеров группы, прямой выход
триггера соединен с информационным выходом j-й модели перехода, который через j-й ключ блока задания конечного режима соединен с первым входом третьего элемента ИЛИ, остальные m входов которого являются индикационными входами j-й модели перехода, выходы третьей группы элементов И - индикационными выходами модели перехода и соединены с второй группой входов блока индикации, пятый выход блока
синхронизации соединен с информационным входом блока сравнения, установочный вход которого соединен с первым выходом блока уставок, третий выход которого подключен к первому управляющему входу блока сравнения, вторая группа Р управляющих входов которого соединена соответственно с выходами ключей блока задания конечного режима.
I.
;J Фиг.З
.
ем со о f-
00
1
.ЦЦи ц д
ЧК МЛ Ф
г-г
х
П
о
$
xsI
ТраТГ
| Стабилизатор-ограничитель напряжения переменного тока | 1984 |
|
SU1246070A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля экспоненциальных процессов | 1984 |
|
SU1282087A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для допускового контроля параметров объектов | 1982 |
|
SU1056134A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
