Изобретение относится к точному приборостроению и может быть использовано в оптических и других точных приборах для перемещения объектов с высокой точностью„
Известен механизм точного позиционирования, включающий корпус, размещенные в нем приводное устройство в виде лары винт-гайка с отсчетной шкалой и исполнительное устройство в сиде установленного с возможностью вращения столика с жестко связанным с ним рычагом, взаимодействующим с приводным устройством 1J ..
Недостатком известного механизма является ограничение возможностей по реализации больших масштабов преобразования при ограниченных габаритных размерах„
Наиболее близким по технической сущности и достигаемому эФЛекту к
предложенному техническому решению является механизм точного позиционирования содержащий корпус и размещенное в нем приводное устройство в виде пары винт-гайка, исполнительное устройство в виде установленного с возможностью вращения столика и жестко связанного с ним рычага с конической выемкой на свободном конце, и передающее устройство, кинематически связанное с приводным и исполнительным устройствами 2 .,
Недостатком данного механизма является недостаточно высокая точность позиционирования из-за малой величины передаточного отношения передающего устройства,, понижающей чувствительность механизма.
Целью изобретения является повышение точности позиционирования.,
00
ю о
о
Цель достигается тем, что передающее устройство выполнено в виде установленной своим основанием в корпусе с возможностью качания в направ- лении оси винта на сферических опорах скобы, имеющей на внутренней поверхности, которая обращена к выемке рычага, коническую выемку,.двух шариков, установленных в конических вы- емках рычага и скобы, и цилиндра, установленного в скобе между этими шариками и предназначенного для взаимодействия своими торцами с последними.
Выполнение передающего устройства вышеуказанным образом позволяет повысить величину передаточного отношения перелающего устройства благодаря возникновению эффекта пмертвого положе- ния, при котором перемещение на выходе, в частности перемещение конца цилиндра взаимодействующего с рычагом исполнительного устройства, является минимальным, в результате чего повышается точность позиционирования„
Кроме того, выполнение передающего устройства указанным образом способствует исключению деформации элементов конструкции, возникающей при изменении температуры окружающей среды, что ведет к устранению погрешностей при передаче движения и, в конечном итоге, повышает точность позиционирования„
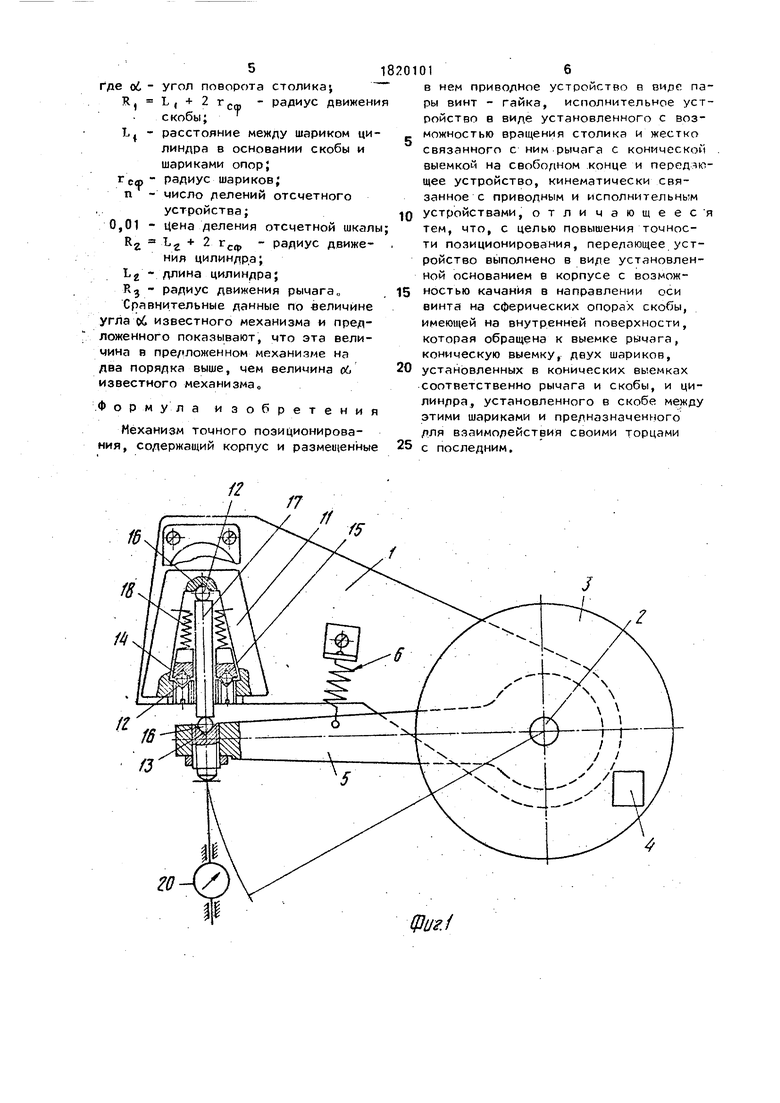
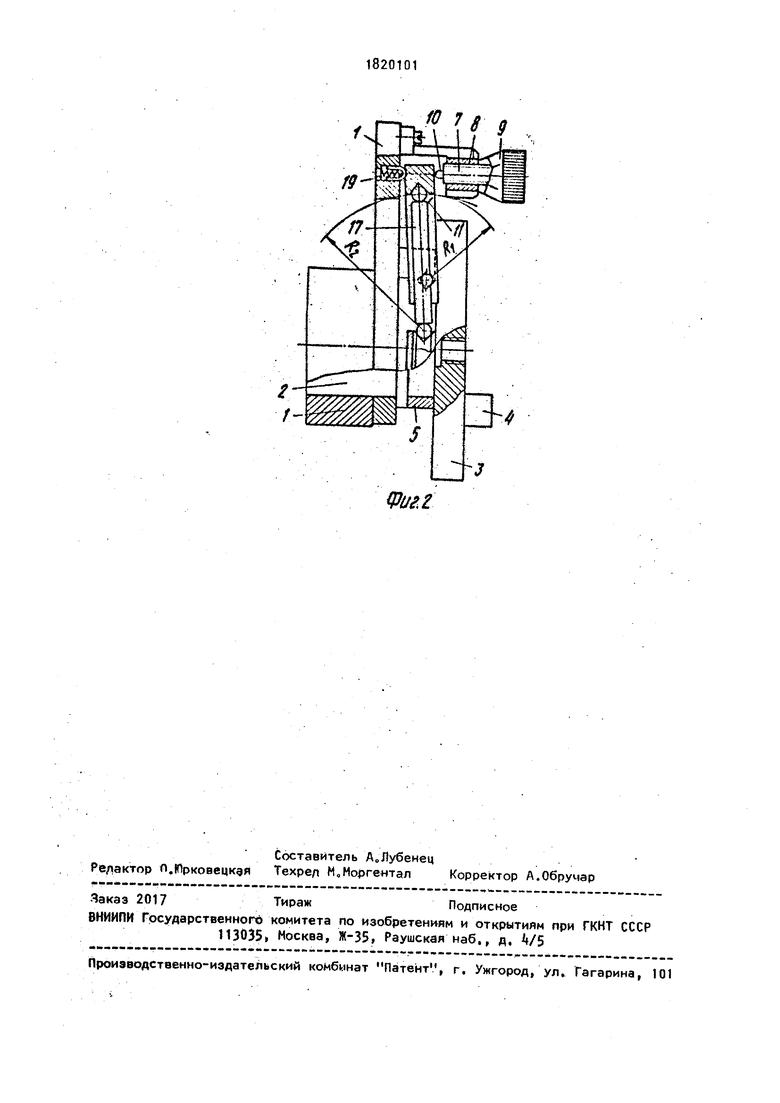
На фиг„1 и 2 изображен механизм точного позиционирования о
Механизм содержит корпус 1, на оси 2 которого установлен с возможностью углового поворота столик 3 позиционирования с объектом k. На ось 2 насажена опора рычага 5, жестко соединенного со столиком 3 и связанного с корпусом 1 посредством пружины 6„ В корпусе 1 размещено приводное устройство, выполненное - в виде пары винт 7-гайка 8 с отсчетной шкалой 9 и шариком 10С На корпусе 1. размещено передающее устройство, выполненное в виде скобы 11, установ- ленной с возможностью качания на сферических опорах в направлении оси винта, для осуществления чего в скобе выполнены три выемки 12, две из которых выполнены на внутренней поверх- ности основания скобы 11, а третья -
на внутренней поверхности скобы, . обращенной к выемке 13 рычага 5. Механизм содержит четыре шарика: первую пару шариков И, установленных в конических выемках основания скобы 11 и предназначенных для взаимодействия с коническими еыемками 15 корпуса 1, и вторую пару шариков 16, один из которых установлен на внутренней поверхности скобы, обращенной к выемке 13 рычага 5, а другой - в конической выемке 13 рычага 5о Механизм содержит цилиндр 17, установленный в скобе 11„Скоба связана с корпусом 1 посредством пружин 18, а вин г 7 - со скобой посредством пружины 19, концом закрепленной на корпусе 1. Указанные пружины осуществляют силовое замыкание механизма, устраняющее зазоры в соединениях. Механизм снабжен нногооборотным индикатором 20 часового типа
Механизм точного позиционирования работает следующим образом,,
Предварительно проводят установку начала отсчета механизма„ С этой целью вращают винт 7 приводного устройства сначала в одну, а затем в другую сторону на одинаковую величину,, Через шарик 10 движение передается к скобе 11 и далее через цилинд 17 рычагу 5 и соединенному с ним столику 3 с объектом lft.
Со свободной от выемки 13 стороны рычага 5 устанавливают многооборотный индикатор 20„ Положительные от- кпонения показаний индикатора, полученные при обратном ходе, суммируют с показаниями индикатора, полученными при прямом ходео
Величину полусуммы показаний индикатора считают за нулевое положение столика 3„ Отсчетную шкалу 9 устанавливают на ноль и считают это положение на начало отсчета. Вращением винта 7 осуществляют качатель- ное движение скобы 11 в направлении оси винта, которая одновременно ока- зывает воздействие через шарики 16 на цилиндр 17 и рычаг 5, совершающий совместно со столиком 3 угловое перемещение
Величину углового перемещения столика 3 определяют из следующей зависимости;
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи | 1987 |
|
SU1428882A1 |
| Устройство для точного перемещения рабочего органа станка | 1983 |
|
SU1199461A1 |
| Механизм точной подачи | 1985 |
|
SU1288408A1 |
| Прибор для определения сопротивляемости образца клейковины сжатию | 1983 |
|
SU1272240A1 |
| УСТАНОВКА ДЛЯ ДИАГНОСТИКИ НЕСУЩЕЙ СПОСОБНОСТИ ПОВЕРХНОСТНЫХ СЛОЕВ ИЗДЕЛИЙ | 2000 |
|
RU2164676C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ ПОЛУПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 1973 |
|
SU399799A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВОСПРОИЗВОДИМОЙ ДОЗИРОВАННОЙ КОНТУЗИОННОЙ ТРАВМЫ СПИННОГО МОЗГА У КРЫС | 2021 |
|
RU2755234C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ, ИЗНОСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252394C1 |
| Ленточно-шлифовальный станок | 1981 |
|
SU971630A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛОВ МЕТОДОМ ЦАРАПАНИЯ | 2008 |
|
RU2373515C1 |
Изобретение относится к машиностроению, а именно к точному приборостроению, и может быть использовано в оптических и других точных приборах для перемещения объектов с высокий точностью Целью изобретения является повышение точности позиционирования. Цель достигается тем, что кинематическая связь винта с рычагом выполнена по иному„ При вращении винта 7 приволного устройства сначала в одну, а затем в другую сторону на одинаковую величину через шарик 10 движение перелается скобе 11 и далее через цилиндр 17 рычагу 5 и соединенному с ним столику 3 объектом „ 2 ил„
Ci arctg
R, (n-OzOl)(n-0JL01)J .(
L, + 2 rc(p - радиус движен
L4
n
0,01 R
где об - угол поворота столика-, R,
с кобы;
расстояние между шариком цилиндра в основании скобы и шариками опор; радиус шариков; число делений отсчетного устройства;
Цена деления отсчетной шкал 1г + 2 гсф - радиус движений цилиндра; L2 длина цилиндра; ТЦ - радиус движения рычага„ Сравнительные данные по величине угла об известного механизма и предложенного показывают, что эта величина в предложенном механизме на два порядка выше, чем величина об известного механизма,
.Формула изобретения
Механизм точного позиционирования, содержащий корпус и размещенные
ZO
8201016
в нем приводное устройство а вире пары винт - гайка, исполнительное устройство в виде установленного с возможностью вращения столика и жестко связанного с ним рычага с конической выемкой на свободном .конце и передающее устройство, кинематически связанное с приводным и исполнительным устройствами, отличающееся тем, что, с целью повышения точности позиционирования, передающее устройство выполнено в виде установленной основанием б корпусе с возможностью качания в направлении оси винта на сферических опорах скобы, имеющей на внутренней поверхности, которая обращена к выемке рычага, коническую выемку, двух шариков, установленных в конических выемках соответственно рычага и скобы, и цилиндра, установленного в скобе между этими шариками и предназначенного для взаимодействия своими торцами с последним.
10
15
20
25
J
2
4
фиг./
4
шг
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
| Там же,, ( МЕХАНИЗМ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | |||
