Изобретение относится к измерению вакуума, в частности к вакуумметрам с электростатически подвешенным вращающимся ротором.
Целью изобретения является повышение точности и уменьшение времени измерения вакуума.
Блок-схема предлагаемого вакуумметра приведена на фиг. 1, который содержит чувствительный элемент 1 вакуумметра, сферический ротор 2, управляемый источник высокого напряжения (УИВН) 3, электроды 4 подвеса, индуктор 5 электромагнитной раскрутки ротора, устройство 6 измерения скорости вращения ротора; устройство 7 стабилизации скорости вращения ротора/ устройство 8 индикации.
Выход устройства 6 измерения скорости вращения ротора/соединён с входом устройства 7 стабилизации и с входом устройства 8 индикации, выход устройства 7 стабилизации соединен с входом чувствительного элемента 1 вакуумметра.
Чувствительный.элемент включает сфе рический ротор 2, индуктор 5, УИВН 3, выходы которого соединены с электродами 4.
Устройство работает следующим Обра- ЗОМ. , : :- .. . ; .; .//. : ; : -, :.: ,-../; -
Сигнал с выхода устройства б измерения скорости поступает на вход устройства 8 индикации, на котором индицируется значение степени вакуумирования. С выхода устройства 7 стабилизации сигнал поступаетна вход чувствительного элемента 1, где происходит стабилизация скорости вращения ротора 2. ГГри этом величина напряжения ошибки на входе устройства 8 индикации пропорциональна тормозящему воздействию на ротор, т.е. степени вакуумирования.,
Блок-схема устройства стабилизации скорости вращения ротора, устройства измерения скорости вращения и индуктора приведена на фиг. 2. Элементы 1-8 включе- ны также, как на фиг. 1.
На фиг. 2 показаны устройство 9 выделения модуля напряжения, первый усилитель 10 переменного тока, второй усилитель It переменного тока, первая обмотка -12 индуктора, вторая обмотка 13 индуктора, источник; 14k опорной частоты дискриминатор 15 Цастоты, оптический датчик 16 угловогоположения ротора...
Первый вход дискриминатора 15 соединен с источника 14, а второй вход - с вы)ф|омоптичеЁкргоСдатчика 16. Выход дискриминатора 15 соединен Ј входом уст- . ройства 8 индикации, через устройство 9 выделения модуля -с входами усилителей 10 и 11. Выходы усилителей 10 и 11 соединены соответственно с обмотками 12 и 13 индуктора 5.
Устройство стабилизации работает следующим образом.
Ротор 2, раскрученный до определенной частоты, тормозится под влиянием неидеального вакуума. На выходе оптического датчика 16 (см. фиг. 2) образуется сигнал с частотой, равной частоте вращения ротора.
Частота этого сигнала сравнивается в дискриминаторе 15 с частотой сигнала источника 14. Сигнал, пропорциональный разности частот, поступает на вход усилителя 10 через устройство 9 выделения модуля, на вход
усилителя 11 и вход устройства 8 индикации. С выходов усилителей сигнал переменного напряжения поступает на обмотки 12и 13, где создается электромагнитное поле, стабилизирующее скорость вращения ротора. Таким образом, скорость вращения ротора 2 стабилизирована.
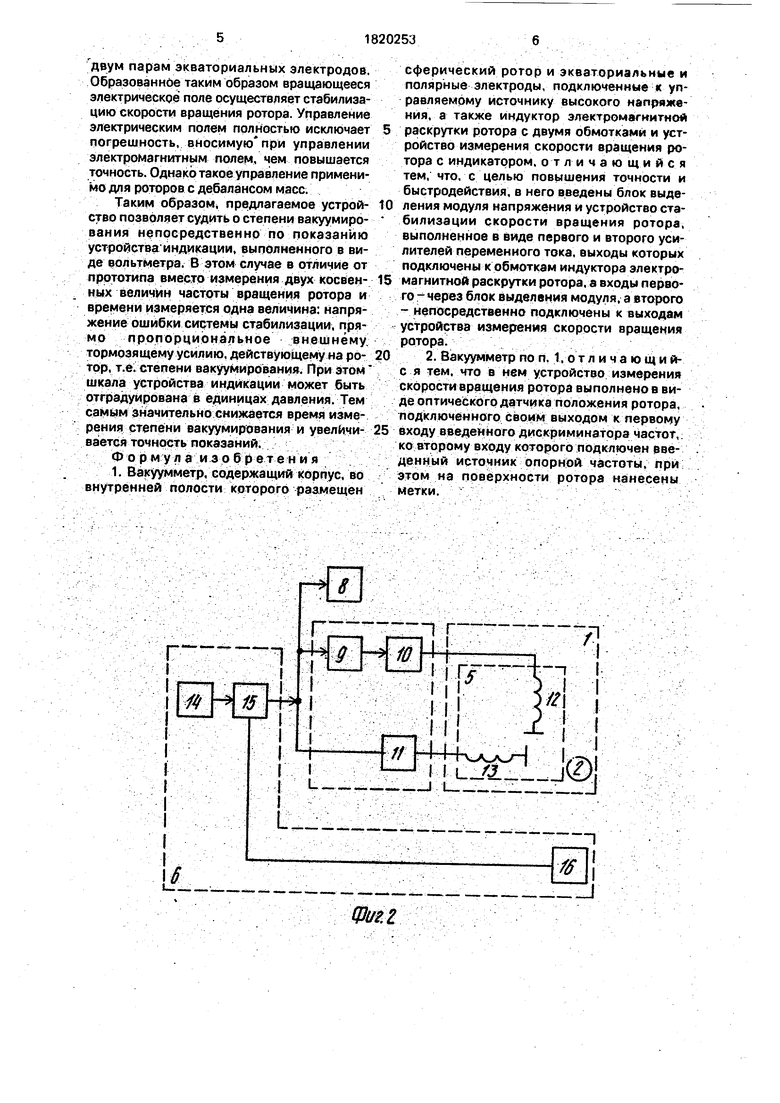
Управление по двум обмоткам позволяет минимизировать токи, протекающие по ним, что существенно уменьшает погрешность, вносимую электромагнитным полем. Стабилизация скорости вращен ия может осуществляться и электрическим полем. Блок-схема такого устройствастабилизации приведена на фиг. 3. Элементы 1-3;
8; 14-16 включены также; как нафиг. 2.
На фиг. 3 показаны первый модулятор 17, второй модулятор 18, первая фазовра- щательная цепь 19 и вторая фазовращатель- ная цепь 20 сдвига На 90°.
Элементы устройства измерения скорости вращения ротора соединены с входом также, как на фиг. 2. Выход дискриминатора . 15 соединен с входом устройства 8 индикации, а также с входами модуляторов 17 и18.
Выход оптического датчика 16 соединен с
входом первой фазовращательной цепи 19, выход которой соединен с вторым входом модулятора 18 и через вторую фазоедвига- ющую цепь 20с вторым входом модулятора
17. Выходы модуляторов 17 и 18 соединены .с входами УИВН J},выходы которого соединены с электродами 4.
УстройстеО работает следующим обра зом. . . ; ;:.; ;.;.. .. ;/:/;
Сигнал, пропорциональный разности частот, с выхода дискриминатора 15 поступает на входы модуляторов 17 и 18. На вторые входы модуляторов поступает сигнал с выхода оптического датчика 16с начальной
фазой, устанавливаемой цепочкой 19 и сдвинутой на 90° цепочкой 20 С выходов модуляторов 17 и 18 сигнал переменного напряжения поступает на входы устройства 3, с выходов которого переменное напряже- ние. сдвинутое на 90°, прикладывается к
двум парам экваториальных электродов. Образованное таким образом вращающееся электрическре поле осуществляет стабилизацию скорости вращения ротора. Управление электрическим полем полностью исключает погрешность, вносимую при управлении электромагнитным полем, чем повышается точность. Однако такое управление применимо для роторов с дебалансом масс.
Таким образом, предлагаемое устрой- ство позволяет судить о степени вакуумиро- вания непосредственно по показанию устройства индикации, выполненного в виде вольтметра. В этом случае в отличие от прототипа вместо измерения двух косвен- ных величин частоты вращения ротора и времени измеряется одна величина: напряжение ошибки системы стабилизации, прямо пропорциональное внешнему; тормозящему усилию, действующему на ро- трр, т.е.степени вакуумирования. При этом шкала устройства индикации может быть отградуирована в единицах давления. Тем самым значительно снижается время измерения степени вакуумирования и увелйчи- вается точность показаний.
Ф о рI.-M у л а изо брете н и я , 1. Вакуумметр, содержащий корпус, во внутренней полости которого размещен
сферический ротор и экваториальные и полярные электроды, подключенные к управляемому источнику высокого напряжения, а также индуктор электромагнитной раскрутки ротора с двумя обмотками и устройство измерения скорости вращения ротора с индикатором, отличающийся тем, что, с целью повышения точности и быстродействия, в него введены блок выделения модуля напряжения и устройство стабилизации скорости вращения ротора, выполненное в виде первого и второго усилителей переменного тока, выходы которых подключены к обмоткам индуктора электромагнитной раскрутки ротора, а входы первого - через блок выделения модуля, а второго -непосредственно подключены к выходам устройства измерения скорости вращения ротора.
2. Вакуумметр по п, Т.отл ича ющий- с я тем, что в нем устройство измерения скорости вращения ротора выполнено в виде оптического датчика положения ротора, подключенного своим выходом к первому входу введенного дискриминатора частот,: ко второму входу которого подключен введенный источник опорной частоты, при; этом на поверхности ротора нанесены метки. /У ; . 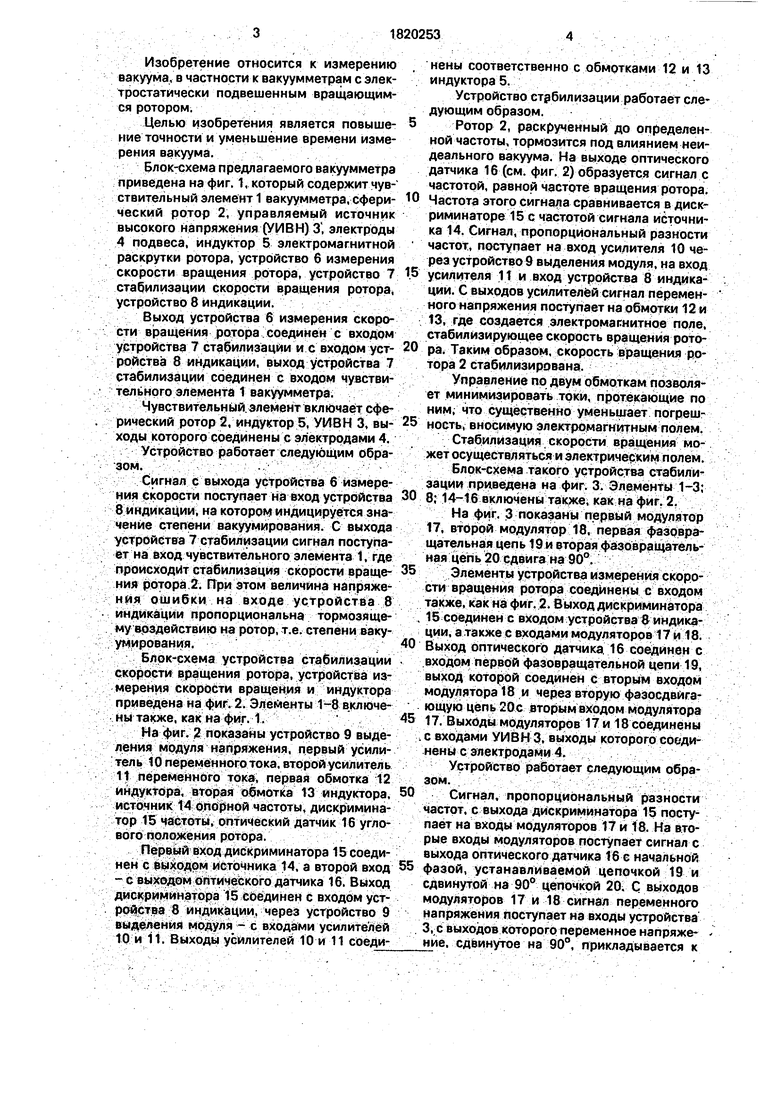
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Вакуумметр | 1991 |
|
SU1793289A1 |
| Регулируемый вентильный электродвигатель | 1979 |
|
SU864449A1 |
| Вакуумметр | 1979 |
|
SU821978A2 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Вакуумметр | 1989 |
|
SU1652841A1 |
| Автоматический следящий уровнемер | 1961 |
|
SU149904A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1982 |
|
SU1051678A1 |
| Электропривод постоянного тока | 1986 |
|
SU1394387A1 |
| Бесконтактный стабилизированный по напряжению синхронный генератор | 2023 |
|
RU2812277C1 |
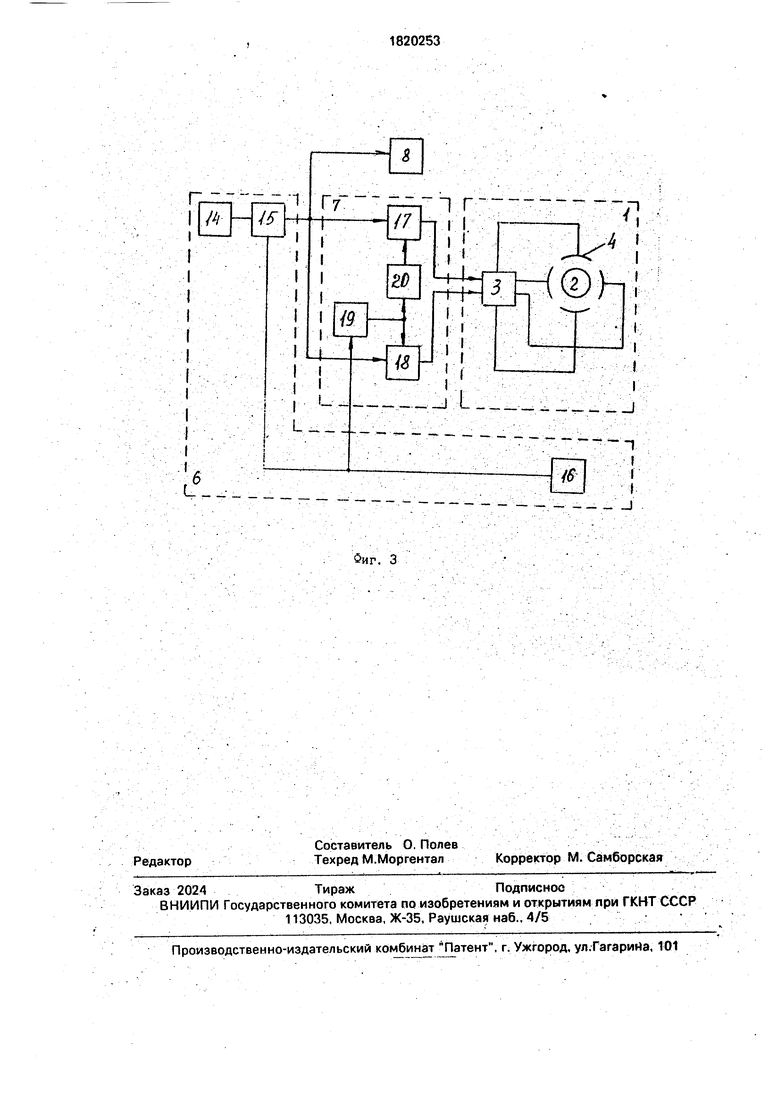
Изобретение относится к измерению вакуума, в частности к вакуумметрам q электрически подвешенным вращающимся ротором. Целью изобретения является повышение точности и уменьшение времени изменения вакуума. Вакуумметр содержит корпус с экваториальными и полярными фиг.1 электродами 4, сферический ротор 2, управляемый источник 3 высокого напряжения, индуктор 5 электромагнитной раскрутки ротора, устройство 6 измерения скорости вращения ротора, устройство 7 стабилизации скорости вращения ротора. Ври включении системы стабилизации скорости вращения ротора независимо от того, каким полем осуществляется управление скоростью вращения ротора (электрическим или элекро- магнитным), сигнал на выходе устройства измерения скорости вращения ротора пропорционален тормозящему моменту, действующему на ротор, а следовательно, степени вакуумирования. Этот сигнал выводится на устройство индикации 8, выполненное в виде вольтметра, по показаниям которого производят измерение вакуума. 1 з.п. ф-лы, 3 . ел с со to О ю ел со
шг
$иг. 3
| Vacuum | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Вакуумметр | 1975 |
|
SU553507A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
