&т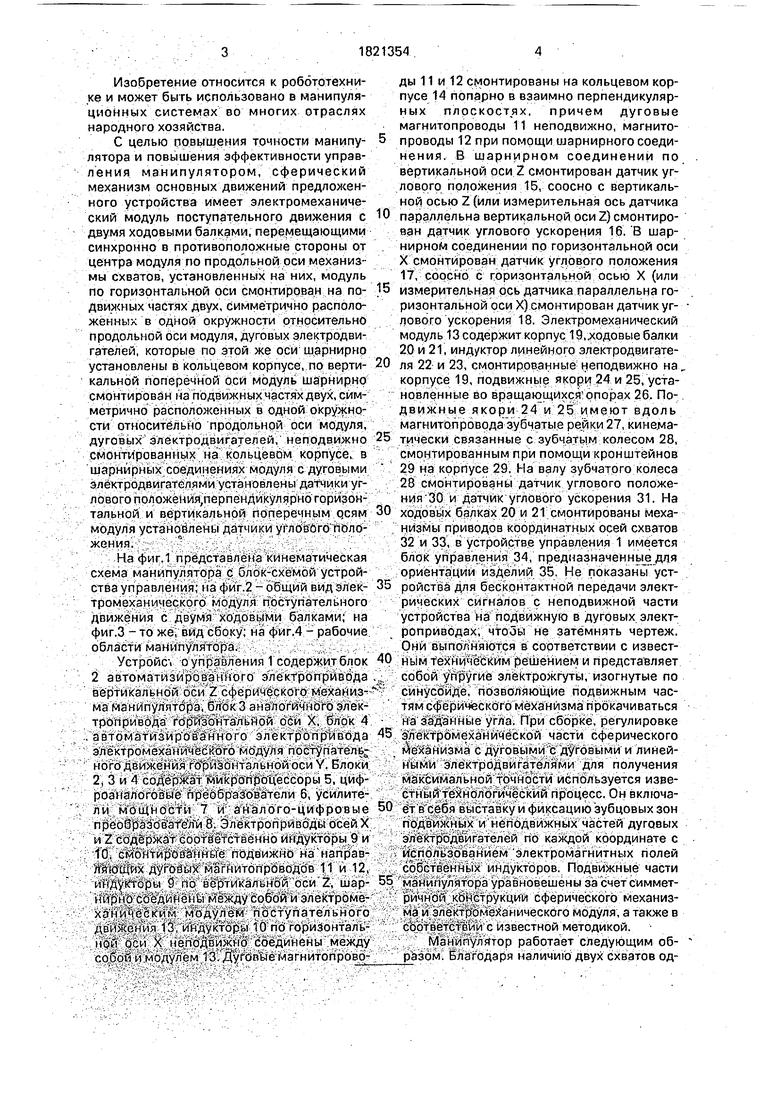
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |
| Устройство для дуговой сварки | 1991 |
|
SU1808564A1 |
| ПОДВОДНОЕ СУДНО | 2016 |
|
RU2702464C1 |
| СВАРОЧНЫЙ ТРАКТОР И СПОСОБ СВАРКИ КОЛЬЦЕВЫХ ШВОВ ИЗДЕЛИЙ СВАРОЧНЫМ ТРАКТОРОМ | 2002 |
|
RU2224629C1 |
| ПОДЪЕМНО-ТЯГОВОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА НА МАГНИТНОМ ПОДВЕСЕ С ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2036807C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТРЕНАЖЕР | 2005 |
|
RU2361567C2 |
| Индукционный нагреватель | 1982 |
|
SU1092760A1 |
| Привод электрического выключателя | 1991 |
|
SU1800491A1 |
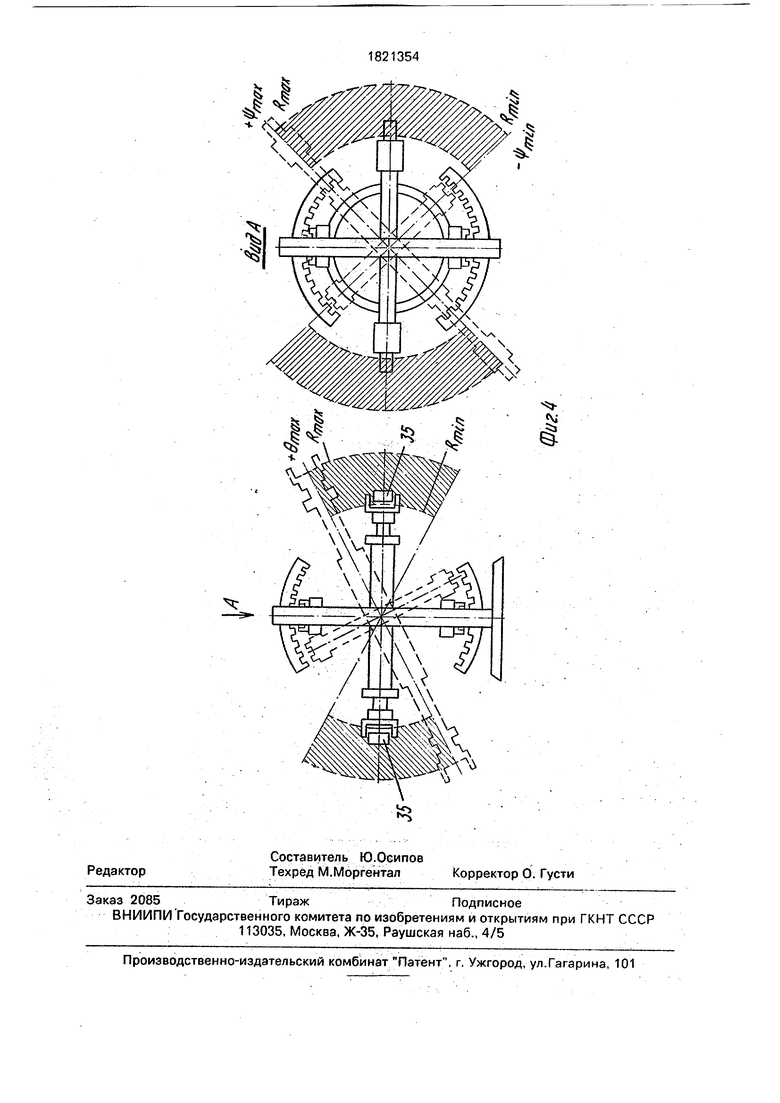
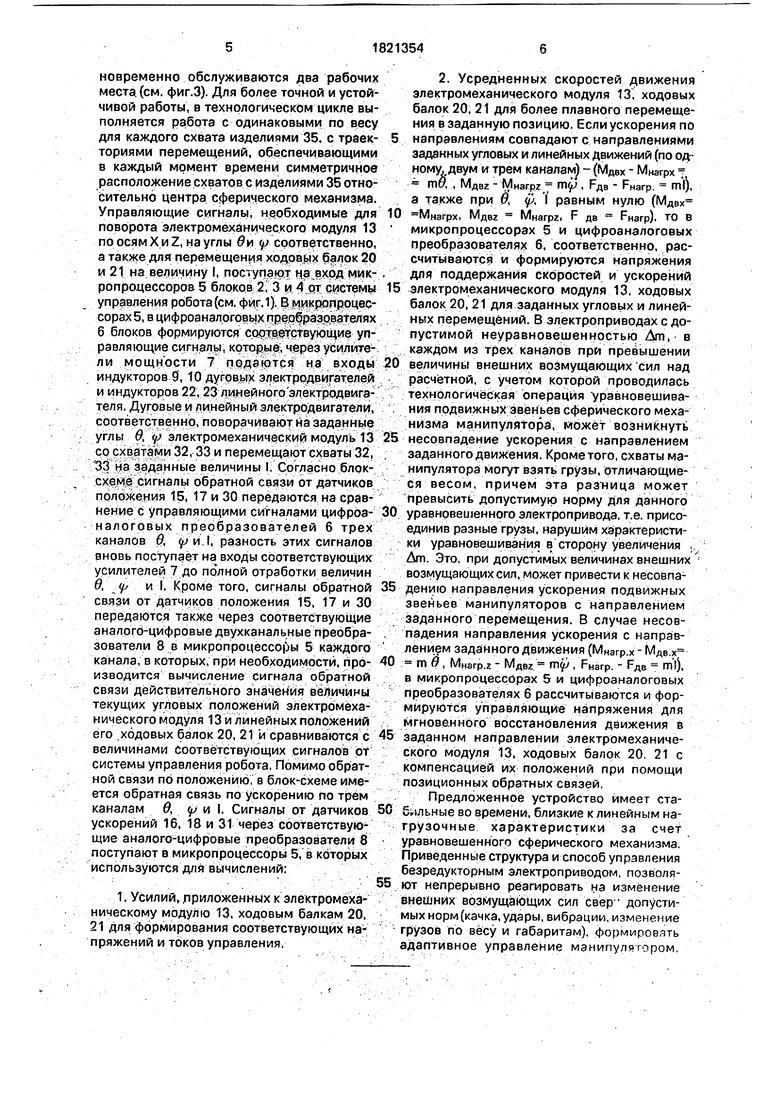
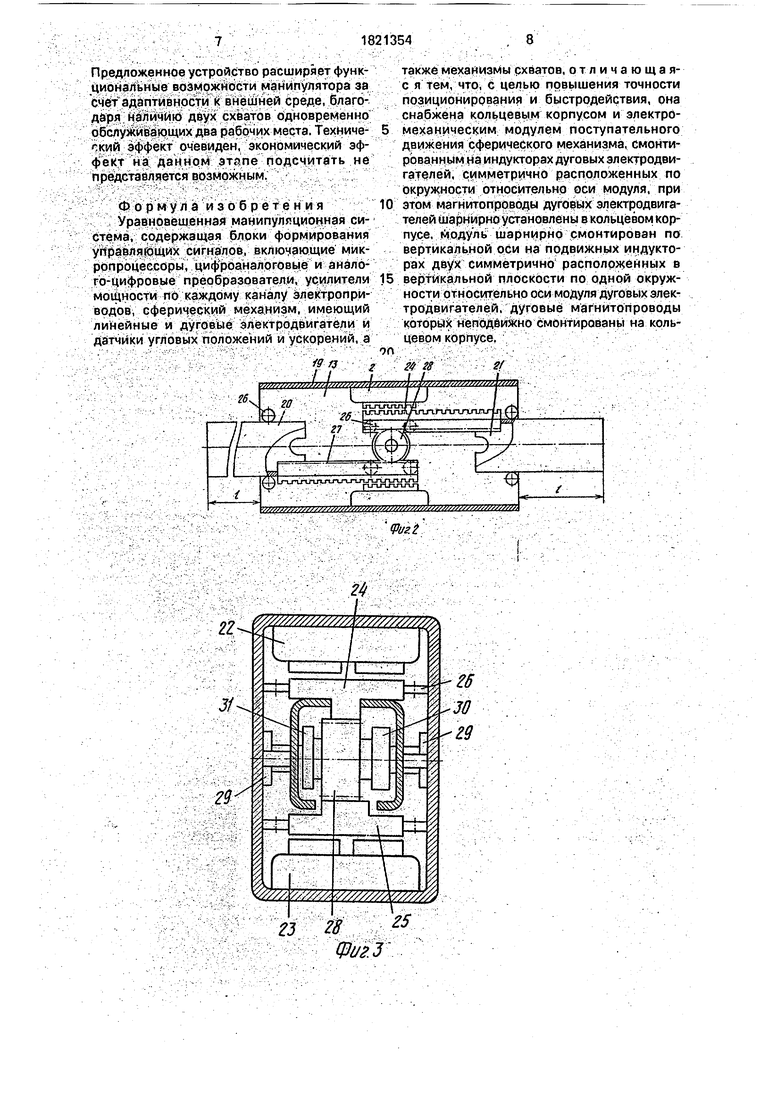
Использование: робототехника, в частности манипуляционные системы во многих отраслях народного хозяйства. Имеется сферический механизм основных движений. В нем имеется электромеханический модуль 13 поступательного движения с двумя ходовыми балками, перемещающимися синхронно в противоположные стороны от„ центра модуля по продольной оси механизма схватов 32 и 33, установленных на них. Модуль 13 по горизонтальной оси смонтирован на двух подвижных индукторах 10, симметрично расположенных по окружности относительно его продольной оси. Магнито- проводы 12 этих дуговых электродвигателей по этой же оси шарнирно установлены в кольцевом корпусе 14. По вертикальной оси модуль 13 шарнирно смонтирован на индукторах 9, симметрично расположенных по окружности относительно продольной оси модуля 13. Магнитопроводы 11 этих дуговых электродвигателей неподвижно смонтированы на кольцевом корпусе 14. В шарнирных соединениях модуля 13 с дуговыми электродвигателями установлены датчики углового положения 15 и 17. 4 ил.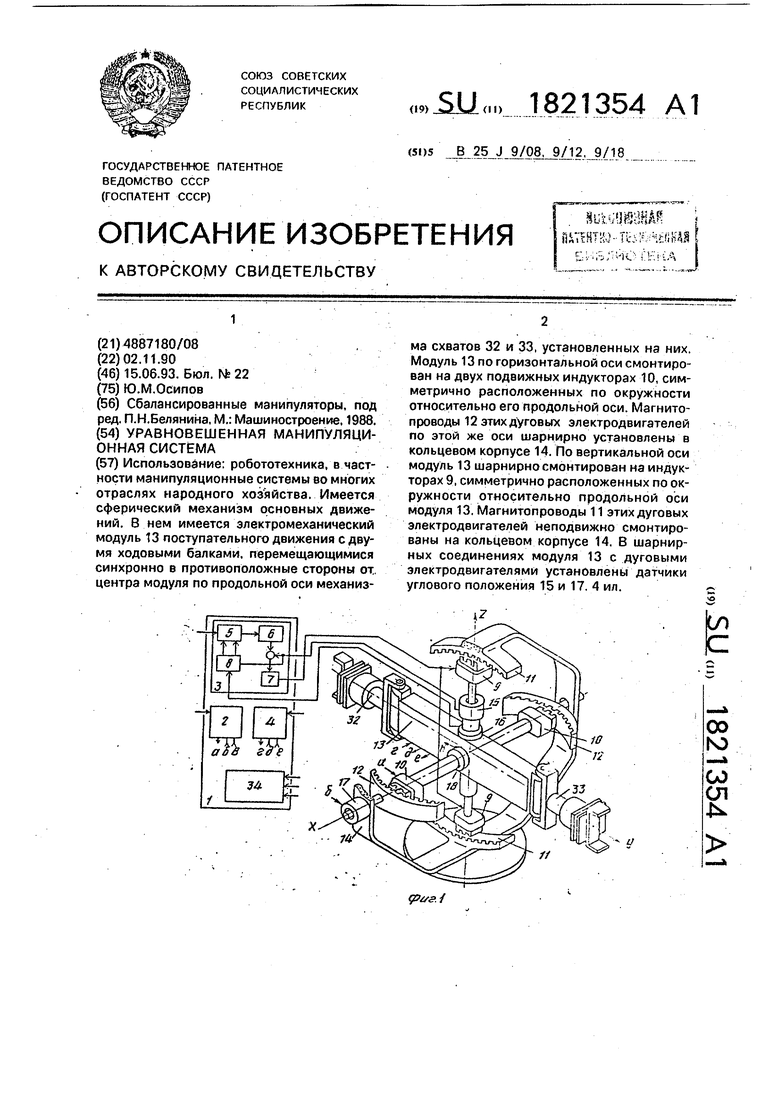
23
Ж:25
ФШ
. $
30
гз
| Сбалансированные манипуляторы, под ред | |||
| П.Н.Белянина, М.: Машиностроение | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
