Изобретение относится к робототехнике и может быть использовано в манипуляционных системах во многих отраслях народного хозяйства.
Известны манипуляторы, предназначенные для крепления, переноса и установки свариваемых деталей в положения, требуемые для обеспечения требований технологии и доступности места сварки. Позиционирование свариваемых деталей производится автоматически от системы управления дискретно, на определенные расстояния и углы (Автоматизация процессов машиностроения: Учеб. пособие для машиностр. спец. вузов/ Я.Буда, В.Гановски, В.С.Вихман и др. Под. ред. А.И. Дащенко, М. Высш. шк. 1991, стр. 291 292). Недостатком является малое количество степеней подвижности рабочего стола и отсутствие возможностей для непрерывного перемещения заготовок или деталей для обеспечения сварки, резки, термической обработки и т.п. сложных криволинейных и сферических поверхностей с высокой точностью.
С целью повышения функциональных возможностей предлагаемая манипулятор-платформа снабжена корпусом с двумя взаимно-перпендикулярными установочными поверхностями, в подвижной части сферического механизма (по типу А.С. N 1821354, бюлл. N 22 от 15.06.93 г.), в плоскости кольца между парами индукторов дуговых электродвигателей смонтирована платформа, имеющая попарно по взаимоперпендикулярным осям, соответствующим осям дуговых электродвигателей, индукторы вращающего электродвигателя и магнитопровод-ротор с крестовым столом, причем одной парой индукторов платформа соединена неподвижно с парой индукторов дугового электродвигателя, связанного шарнирно с корпусом, другой парой индукторов соединена шарнирно с парой индукторов дуговых электродвигателей, соединенных с корпусом неподвижно, крестовый стол смонтирован неподвижно относительно магнитопровод-ротора при помощи направляющих, перпендикулярных плоскости стола, на нем установлены магнитопроводы линейных двигателей, индукторы которых смонтированы на магнитопровод-роторе.
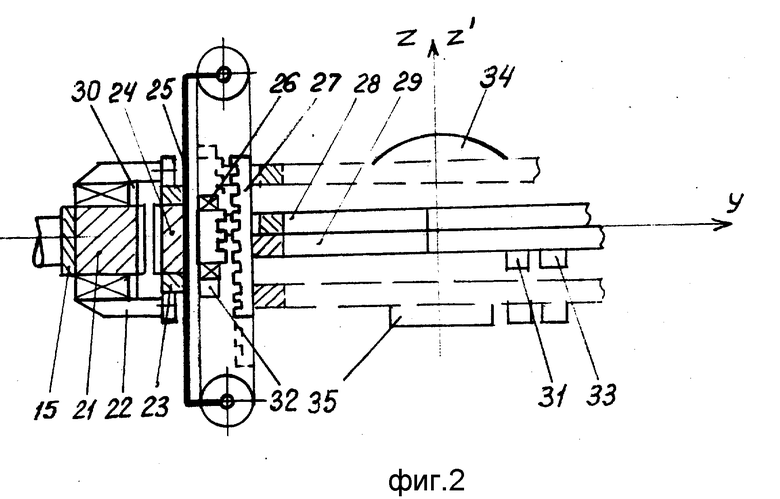
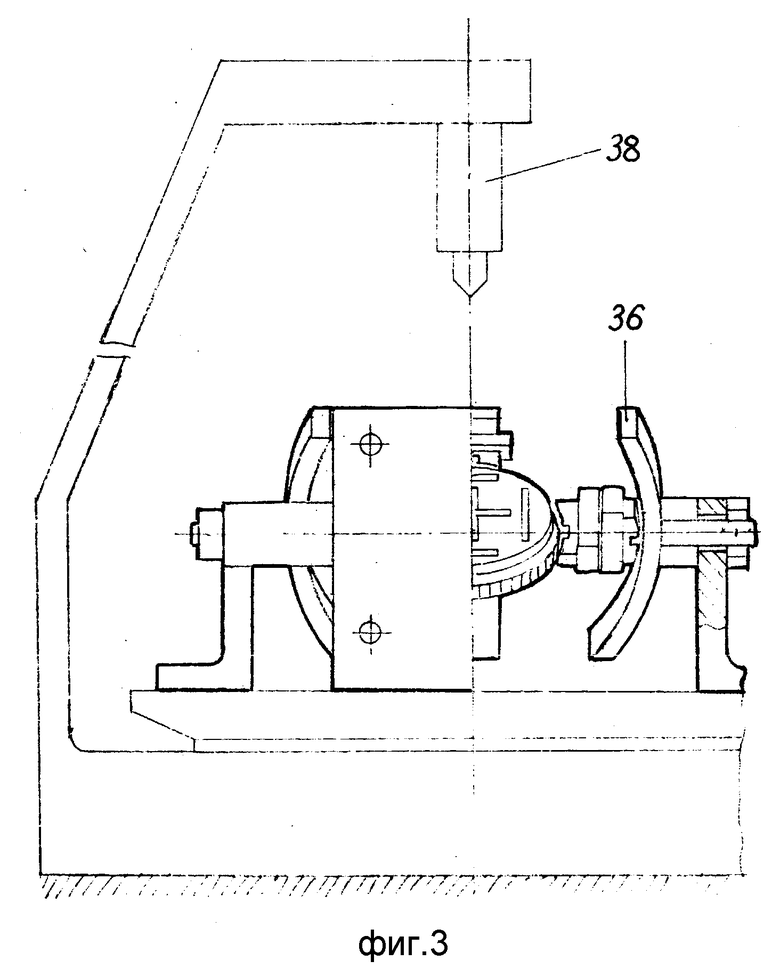
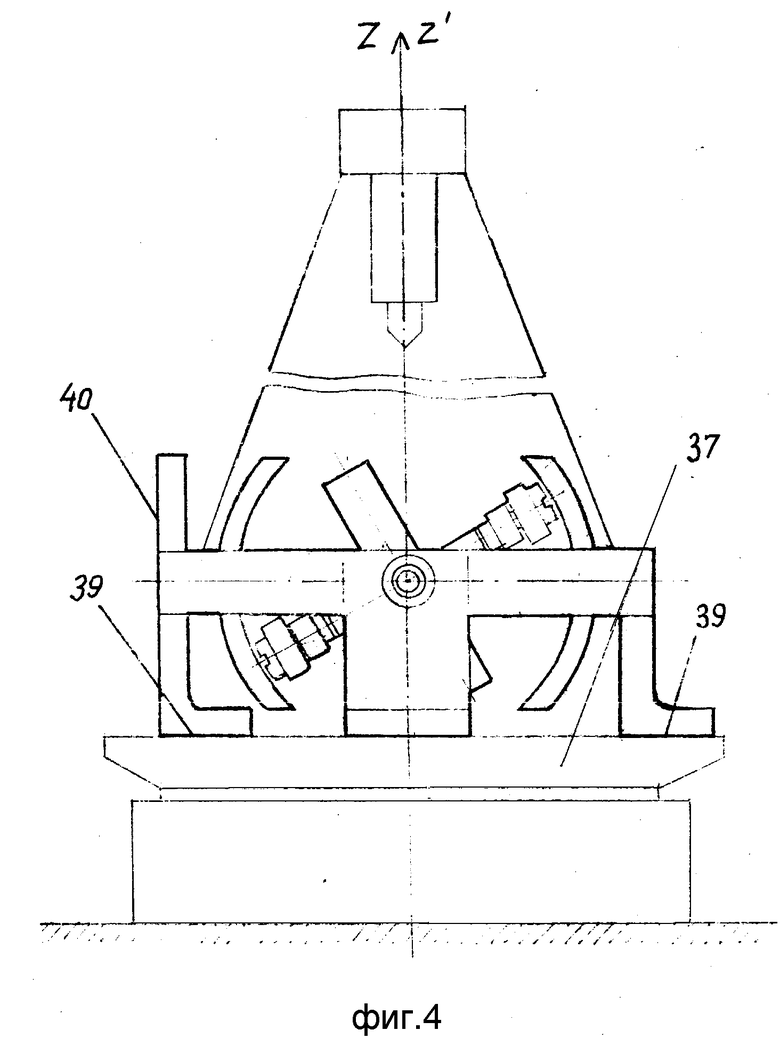
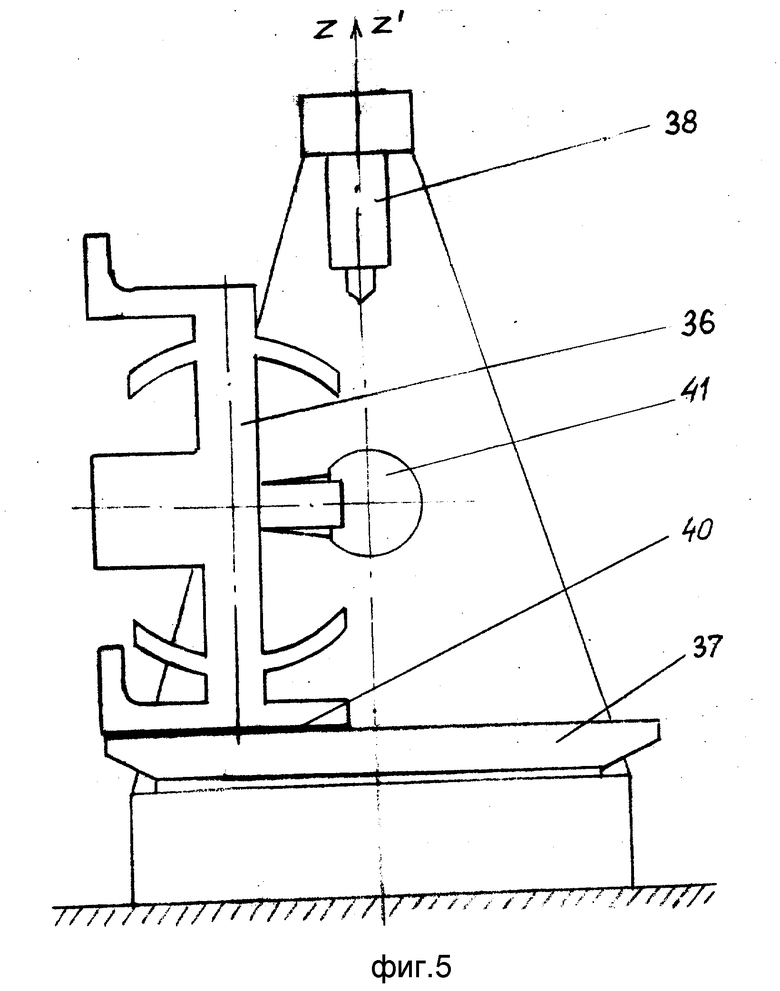
На фиг. 1 представлена кинематическая схема манипулятор-платформы с блок-схемой устройства управления; на фиг. 2 общий вид платформы с магнитопровод-ротором и крестовым столом; на фиг. 3 5 общий вид манипулятор-платформы с координатным столом и лазерной установкой (слева, прямо и справа).
Устройство управления 1 (фиг. 1) содержит блок 2 автоматизированного электропривода вращения относительно вертикальной оси Z крестового стола 3, блоки 4 и 5 дуговых электродвигателй вращения крестового стола 3 относительно осей X и Y, блок электродвигателя линейного перемещения крестового стола 3 вдоль оси Z'. Блоки 2, 4, 5 и 6 содержат микропроцессоры 7, цифроаналоговые преобразователи 8, усилители мощности 9 и аналого-цифровые преобразователи 10. Электродвигатели осей X и Y содержат соответственно индукторы 11 и 12, смонтированные подвижно на направляющих магнитопроводов дуговых электродвигателей 13 и 14. Индукторы 11 по горизонтальной оси Y неподвижно, а индукторы 12 по горизонтальной оси X шарнирно, соединены с платформой 15. Магнитопроводы дуговых электродвигателей 13 и 14 смонтированы на кольцевом корпусе 16 попарно в взаимоперпендикулярных плоскостях, причем магнитопроводы дуговых электродвигателей 13 при помощи шарнирного соединения, магнитопроводы 14 неподвижно. В шарнирном соединении по оси Y смонтирован датчик угловых положений 17, соосно с осью Y смонтирован датчик углового ускорения 18. В шарнирном соединении по оси X смонтирован датчик угловых положений 19, соосно с осью X смонтирован датчик углового ускорения 20. Платформа 15 (фиг. 2) содержит индукторы 21, на которых при помощи кареток 22 и кольцевых направляющих 23 смонтирован подвижно магнитопровод-ротор 24. На магнитопроводе-роторе 24 на кронштейнах 25 с замкнутой кинематической связью, на противоположных ветвях которой закреплены индуктор 26 и магнитопровод 27 линейного двигателя (по типу А.С. N 553451, бюлл. N 13 от 05.04.77 г. не менее трех по окружности магнитопровод-ротора 24), смонтирован крестовый стол 3, состоящий из двух плат 28 и 29, причем плата 28 имеет жесткую связь с индуктором 26, плата 29 имеет жесткую связь с магнитопроводом 27. На индукторе 21 вращательного движения относительно оси Z смонтирован датчик углового положения 30, на крестовом столе 3 смонтирован датчик углового ускорения 31. На индукторе 26 линейного двигателя по оси Z' смонтирован датчик линейного положения 32, на крестовом столе 3 смонтирован датчик линейного ускорения 33. На плате 28 крестового стола 3 устанавливается деталь (заготовка) 34, для уравновешивания на плате 29 устанавливается груз 35, равный по весу детали 34, и наоборот. Манипулятор-платформа 36 может устанавливаться на координатном столе 37 с лазерной установкой 38 на установочную поверхность 39 кольцевого корпуса 16 (фиг. 3, 4) и на установочную поверхность 40 кольцевого корпуса (фиг. 5), для обработки различных по конфигурации деталей заготовок, например, сферическая прокладка 34 (фиг. 2) или шаровой палец (фиг. 5). Не показаны устройства для бесконтактной передачи электрических сигналов с неподвижной части устройства на подвижную в дуговых электроприводах, чтобы не затемнять чертеж. Они выполняются в соответствии с известным техническим решением и представляют собой упругие электрожгуты, изогнутые по синусоиде, позволяющие подвижным частям сферического механизма прокачиваться на заданные углы (по типу А. С. N 1092638, бюлл. N 18 от 15.05.84 г.). При сборке, регулировке электромеханической части сферического механизма с дуговыми и линейными электродвигателями для получения максимальной точности используется известный технологический процесс. Он включает в себя выставку и фиксацию зубцовых зон подвижных и неподвижных частей дуговых электродвигателей по каждой координате с использованием электромагнитных полей собственных индукторов (по типу А.С. N 1328885, бюлл. N 29 от 07.08.87 г.). Подвижные части манипулятор-платформы уравновешены за счет симметричной конструкции сферического механизма и электромеханического крестового стола, а также в соответствии с известной методикой (по типу А.С. N 783609, бюлл. N 44 от 30.11.80 г.).
Манипулятор-платформа работает следующим образом. Детали 34 или 41 обрабатываемыми поверхностями (сферическими или криволинейными) должны обкатываться а фокальной плоскости лазерного луча установки 38, относительно неподвижного светового пятна лазера. Эти сложные движения обеспечиваются электроприводами манипулятор-платформы, позволяющими манипулировать крестовым столом 3 с деталями по сигналам устройства управления 1 в зависимости от заданной управляющей программы. Управляющие сигналы, необходимые для поворота и поступательного перемещения крестового стола 3 по осям X, Y, Z и Z' соответственно, поступают на вход микропроцессоров 7 блоков 2, 4, 5 и 6 от системы управления автоматизированного комплекса, включающего координатный стол 37 и лазерную установку 38. В микропроцессорах 7, в цифроаналоговых преобразователях 8 блоков формируются соответствующие управляющие сигналы, которые через усилители мощности 9 подаются на входы индукторов 11, 12, 21 дуговых электродвигателей и 26 линейных электродвигателей. Дуговые и линейные электродвигатели, соответственно, поворачивают и перемещают крестовый стол 3 с деталями 34 или 41 на заданные величины θ, Φ, α и h. Согласно блок-схеме сигналы передаются на сравнение с управляющими сигналами цифроаналоговых преобразователей 6 четырех каналов q, Φ, α и h, разность этих сигналов вновь поступает на входы соответствующих усилителей 9 до полной отработки величин q, Φ, α и h. Кроме того, сигналы обратной связи от датчиков положения 17, 19, 30 и 32 передаются также через соответствующие аналого-цифровые двухканальные преобразователи 10 в микропроцессоры 7 каждого канала, в которых, при необходимости, производится вычисление сигнала обратной связи действительного значения величины текущих угловых и линейных положений крестового стола 3 и сравниваются с величинами соответствующих сигналов от системы управления робота. Помимо обратной связи по положению, в блок-схеме имеется обратная связь по ускорению по четырем каналам q, Φ, α и h. Сигналы от датчиков ускорений 18, 20, 31 и 33 через соответствующие аналого-цифровые преобразователи 10 поступают в микропроцессоры 7, в которых используются для вычислений:
усилий, приложенных к крестовому столу для формирования соответствующих напряжений и токов управления;
усредненных скоростей движения крестового стола 3 для более плавного перемещения.
Предложенное устройство расширяет возможности автоматизированного лазерного комплекса с координатным столом и обеспечивает для детали (заготовки) три вращательных и три поступательных движения. Технический эффект очевиден, а экономический эффект на данном этапе подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТРЕНАЖЕР | 2005 |
|
RU2361567C2 |
| МАНИПУЛЯТОР РЕНТГЕНОВСКОГО МИКРОТОМОГРАФА | 2012 |
|
RU2505392C2 |
| Устройство управления манипулятором | 1990 |
|
SU1781024A1 |
| Уравновешенная манипуляционная система | 1990 |
|
SU1821354A1 |
| СПОСОБ СОГЛАСОВАНИЯ ЭЛЕКТРОМАГНИТНЫХ СИСТЕМ И СИСТЕМ С ПОСТОЯННЫМИ МАГНИТАМИ | 2005 |
|
RU2353044C2 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2301142C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |
Изобретение относится к робототехнике и может быть использовано в манипуляционных системах автоматизированных технологических комплексов, где требуется точное перемещение деталей заготовок по сложным криволинейным или сферическим поверхностям для сварки, резки, поверхностной закалке и т.п. Манипулятор-платформа содержит блоки управления по каждому каналу электроприводов, сферический электромеханизм с дуговыми электродвигателями, плоскости поворотных движений которых перпендикулярны плоскости кольцевого корпуса, дуговые магнитопроводы одной пары двигателей неподвижно смонтированы на кольцевом корпусе, другой пары установлены в нем шарнирно, в подвижной части сферического механизма в плоскости кольца между двумя парами индукторов дуговых электродвигателей смонтирована платформа, имеющая попарно по взаимно перпендикулярным осям, соответствующим осям дуговых электродвигателей, индукторы вращающего электродвигателя и магнитопровод-ротор с крестовым столом, причем одной парой индукторов платформа соединена неподвижно с парой индукторов дугового электродвигателя, связанного шарнирно с корпусом, другой парой индукторов соединена шарнирно с парой индукторов дуговых электродвигателей, соединенных с корпусом неподвижно, крестовый стол смонтирован подвижно относительно магнитопровод-ротора при помощи направляющих, перпендикулярных плоскости стола, на нем установлены магнитопроводы линейных двигателей, индукторы которых смонтированы на магнитопровод-роторе. Изобретение обеспечивает перемещение детали тремя вращательными и тремя поступательными движениями. 5 ил.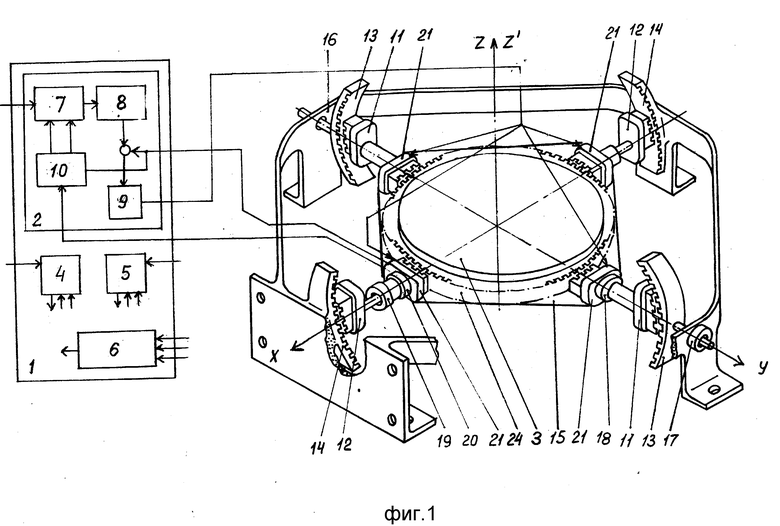
Манипулятор-платформа, содержащая блоки формирования управляющих сигналов, включающие микропроцессоры, цифроаналоговые и аналого-цифровые преобразователи, усилители мощности, линейные и дуговые электродвигатели, сферический механизм с датчиками угловых положений и ускорений, имеющий кольцевой корпус, на котором во взаимно перпендикулярных, диаметральных плоскостях попарно расположены магнитопроводы указанных дуговых электродвигателей, при этом магнитопроводы первой пары смонтированы на кольцевом корпусе неподвижно, а второй пары шарнирно, отличающаяся тем, что она снабжена крестовым столом, магнитопровод-ротором и платформой, смонтированной в плоскости кольца корпуса между двумя парами индукторов дуговых электродвигателей, при этом платформа связана с магнитопроводом-ротором и имеет две пары индукторов, расположенных по осям индукторов дуговых электродвигателей и взаимодействующих с магнитопроводом-ротором, а крестовый стол смонтирован подвижно относительно магнитопровода-ротора и на нем установлены магнитопроводы линейных электродвигателей, индукторы которых смонтированы на магнитопроводе-роторе, при этом на корпусе выполнены две взаимно перпендикулярные установочные поверхности.
| Уравновешенная манипуляционная система | 1990 |
|
SU1821354A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
