Изобретение относится к электротехнике и может использоваться в электроприводе конвейеров, грузоподъемных кранов и других механизмов, требующих плавного пуска с постоянным пусковым моментом.
Целью изобретения является получение пусковых механических характеристик двигателя с постоянным моментом.
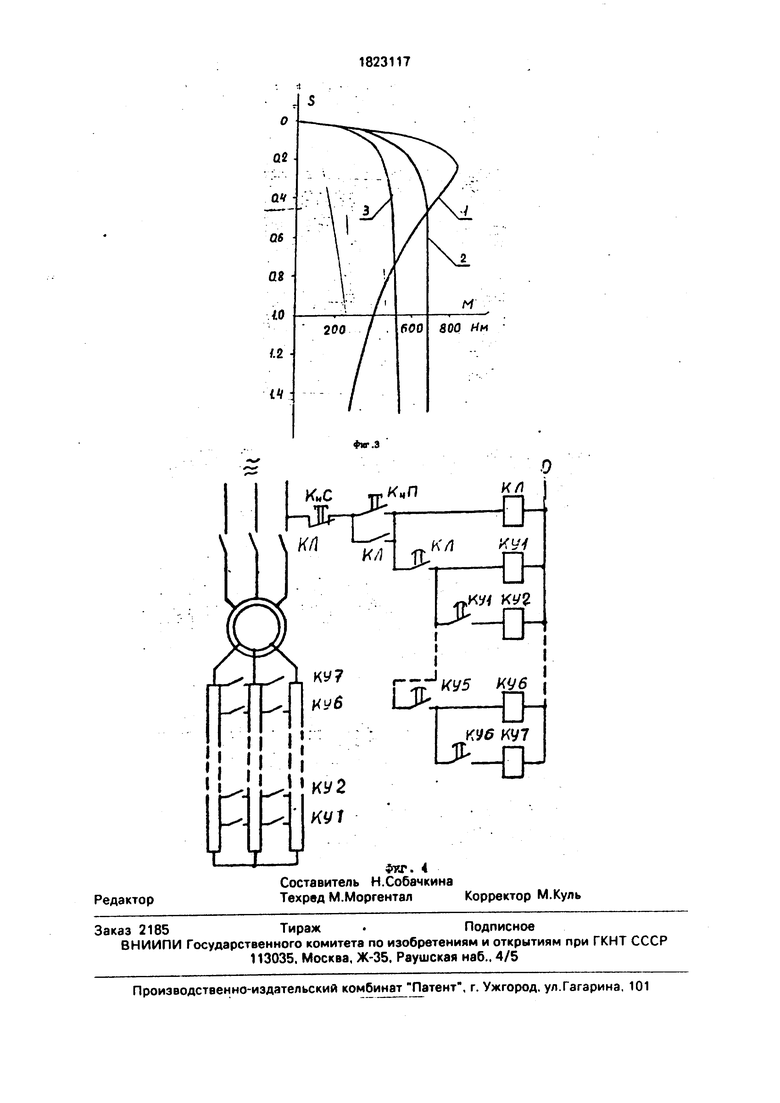
На фиг.1 представлена схема предлагаемого электропривода; на фиг.2 - графики зависимости величины (модуля) сопротивления одной фазы реостата и разности начальных фаз тока и напряжения в фазе реостата от величины сопротивления нагрузки; на фиг.З - механические характеристики двигателя; на фиг.4 - схема электропривода.
Электропривод (см. фиг.1) содержит асинхронный двигатель с фазным ротором 1, индуктивный реостат, выполненный в виде трансформатора Тр, обмотка 2 которого соединена с ротором двигателя, а обмотка 3
- с выпрямительным мостом 4 Выход выпрямительного моста 4 замкнут на резистор нагрузки 5, величину сопротивпения которого при необходимости можно менять замыкая или размыкая контакты К1, К2 КЗ... .
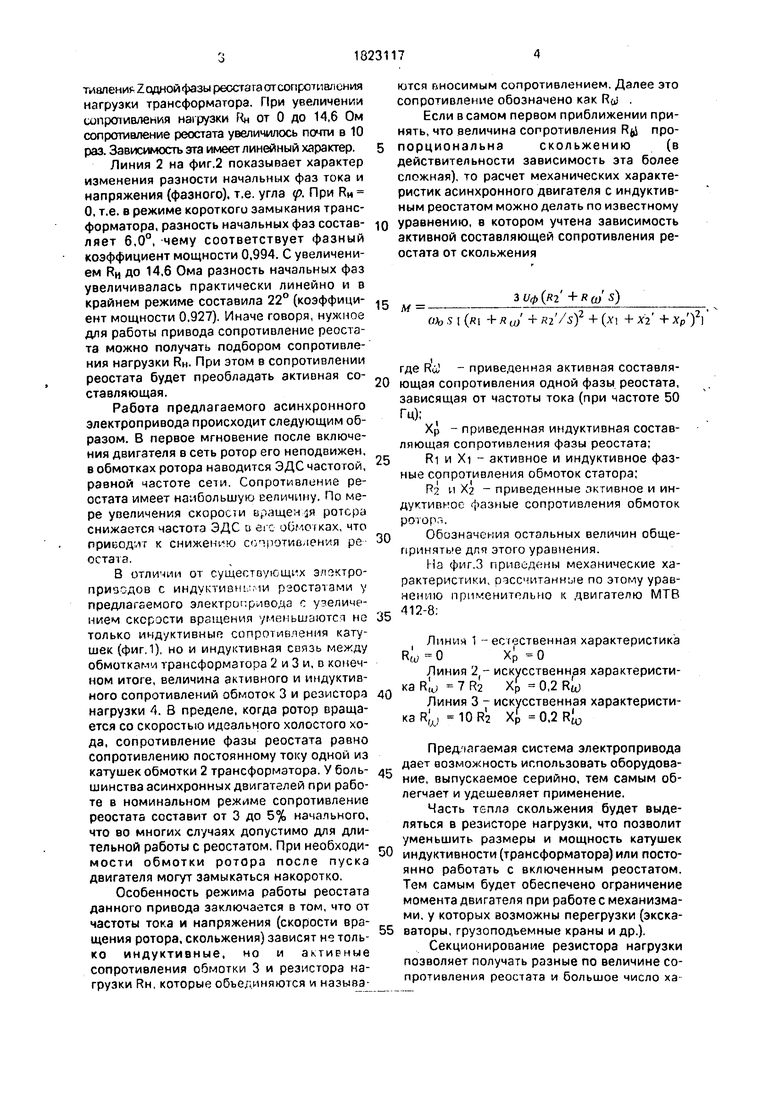
Характеристика индуктивного реостата (см. фиг.2) снималась с трансформатором, выполненным на Ш-образном ленточном стержневом сердечнике сечением 12,5 см2, с высотой обмоточного окна 50 мм. Обмотка 2 трансформатора имела 562 витка в каждой фазе, обмотка 3-94 витка. Трехфазный выпрямительный мост собран на шести полупроводниковых вентилях Д305. Секции резистора нагрузки позволяли устанавливать следующие величины сопротивлений 0,5; 0,67; 2,35; 2,96; 7,47: 8,93; 9,07 и 14 6 Ома.
На фиг 2 приведены графики построенные по данным испытания реостата Линия 1 показывает зависимость полного сопроСО
С
00
ю со
V4
тиаления-Z одной фазы реостата от сопротивления нагрузки трансформатора. При увеличении сопротивления нагрузки RH от 0 до 14,6 Ом сопротивление реостата увеличилось почти в 10 раз. Зависимость эта имеет линейный характер.
Линия 2 на фиг.2 показывает характер изменения разности начальных фаз тока и напряжения (фазного), т.е. угла (р. При RM О, т.е. в режиме короткого замыкания трансформатора, разность начальных фаз составляет 6,0°, чему соответствует фазный коэффициент мощности 0,994. С увеличением RH до 14,6 Ома разность начальных фаз увеличивалась практически линейно и в крайнем режиме составила 22° (коэффициент мощности 0.927). Иначе говоря, нужное для работы привода сопротивление реостата можно получать подбором сопротивления нагрузки RH. При этом в сопротивлении реостата будет преобладать активная составляющая.
Работа предлагаемого асинхронного электропривода происходит следующим образом. В первое мгновение после включения двигателя в сеть ротор его неподвижен, в обмотках ротора наводится ЭДС частотой, равной частоте сети. Сопротивление реостата имеет наибольшую величину. По мере увеличения скорости вращения ротора снижается частота ЭДС о егс оОмочках, что приводит к снижению сопротивления ре остата.
В отличии от существующих электроприводов с индуктивными рэостатами у предлагаемого электропривода с узеличе- нием скорости вращения уменьшаются не только индуктивные сопротивления катушек (фиг.1), но и индуктивная связь между обмотками трансформатора 2 и 3 и, в конечном итоге, величина активного и индуктивного сопротивлений обмоток 3 и резистора нагрузки А. В пределе, когда ротор вращается со скоростью идеального холостого хода, сопротивление фазы реостата равно сопротивлению постоянному току одной из катушек обмотки 2 трансформатора. У большинства асинхронных двигателей при работе в номинальном режиме сопротивление реостата составит от 3 до 5% начального, что во многих случаях допустимо для длительной работы с реостатом. При необходимости обмотки ротора после пуска двигателя могут замыкаться накоротко,
Особенность режима работы реостата данного привода заключается в том, что от частоты тока и напряжения (скорости вращения ротора, скольжения) зависят не только индуктивные, но и активные сопротивления обмотки 3 и резистора нагрузки RH, которые объединяются и называются вносимым сопротивлением. Далее это сопротивление обозначено как .
Если в самом первом приближении принять, что величина сопротивления R пропорциональна скольжению (в действительности зависимость эта более сложная), то расчет механических характеристик асинхронного двигателя с индуктивным реостатом можно делать по известному
уравнению, в котором учтена зависимость активной составляющей сопротивления реостата от скольжения
15 м
OtoS
31/ф(К2 +Кд) S)
(«i + Rz /s)2 + (xi + хг +V)21
где RoJ - приведенная активная составля- ющая сопротивления одной фазы реостата, зависящая от частоты тока (при частоте 50 Гц);
Хр - приведенная индуктивная составляющая сопротивления фазы реостата; RI и Xi - активное и индуктивное фазные сопротивления обмоток статора;
РЗ и Х2 приведенные активное и индуктивное фазные сопротивления обмоток роторл.
Обозначения остальных величин общепринятые для этого уравнения.
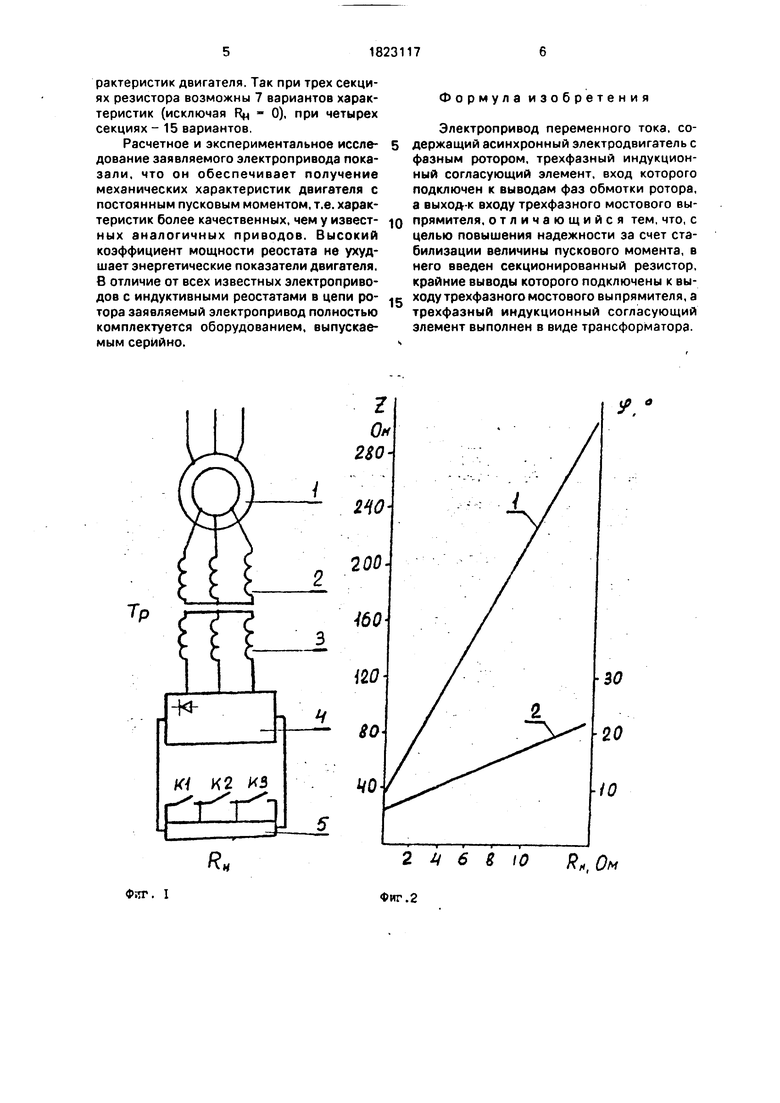
На фиг.З приведены механические характеристики, рассчитанные по этому уравнению применительно к двигателю МТБ
35
412-8:
Линия 1 -естественная характеристика RW 0Хр О
Линия 2 - искусственная характеристика 7 R2 Хр 0,2 RM
Линия 3 - искусственная характеристика R -10R2 Xj 0,2Р
Предлагаемая система электропривода дает возможность использовать оборудование, выпускаемое серийно, тем самым облегчает и удешевляет применение.
Часть тепла скольжения будет выделяться в резисторе нагрузки, что позволит уменьшить размеры и мощность катушек
индуктивности (трансформатора) или постоянно работать с включенным реостатом. Тем самым будет обеспечено ограничение момента двигателя при работе с механизмами, у которых возможны перегрузки (экскаваторы, грузоподъемные краны и др.).
Секционирование резистора нагрузки позволяет получать разные по величине сопротивления реостата и большое число характеристик двигателя. Так при трех секциях резистора возможны 7 вариантов характеристик (исключая RH - 0), при четырех секциях - 15 вариантов
Расчетное и экспериментальное исследование заявляемого электропривода показали, что он обеспечивает получение механических характеристик двигателя с постоянным пусковым моментом, т.е. характеристик более качественных, чем у извест- ных аналогичных приводов. Высокий коэффициент мощности реостата не ухудшает энергетические показатели двигателя. В отличие от всех известных электроприводов с индуктивными реостатами в цепи ротора заявляемый электропривод полностью комплектуется оборудованием, выпускаемым серийно.
0
5
Формула изобретения
Электропривод переменного тока, содержащий асинхронный электродвигатель с фазным ротором, трехфазный индукционный согласующий элемент, вход которого подключен к выводам фаз обмотки ротора, а выход-к входу трехфазного мостового выпрямителя, отличающийся тем, что, с целью повышения надежности за счет стабилизации величины пускового момента, в него введен секционированный резистор, крайние выводы которого подключены к выходу трехфазного мостового выпрямителя, а трехфазный индукционный согласующий элемент выполнен в виде трансформатора.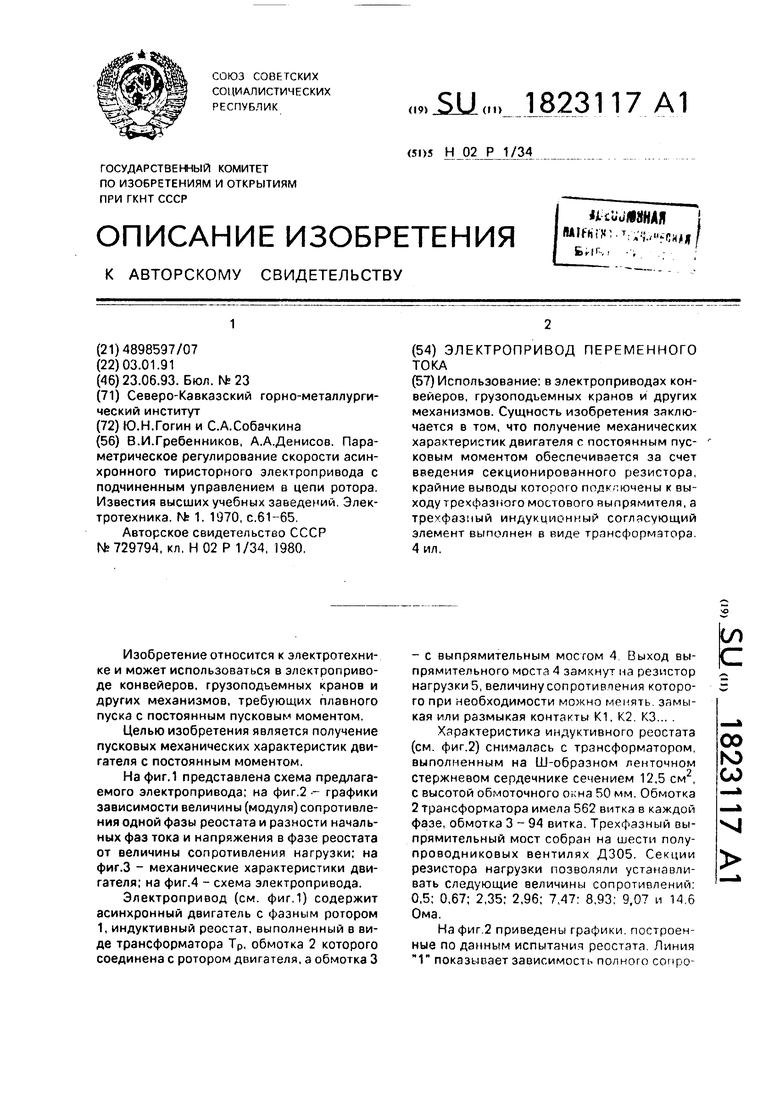
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1985 |
|
SU1339867A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| МАШИНА АСИНХРОННАЯ ВРАЩАЮЩАЯСЯ С ФАЗНЫМ РОТОРОМ | 2021 |
|
RU2772108C1 |
| Асинхронный электропривод | 1989 |
|
SU1663727A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Многодвигательный электропривод | 1988 |
|
SU1628177A2 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050684C1 |
| Электропривод переменного тока | 1984 |
|
SU1358057A1 |
| ЭЛЕКТРОПРИВОД | 2008 |
|
RU2399149C1 |
Использование: в электроприводах конвейеров, грузоподъемных кранов и других механизмов. Сущность изобретения заключается в том, что получение механических характеристик двигателя с постоянным пусковым моментом обеспечивается за счет введения секционированного резистора, крайние выводы которого подключены к выходу трехфазного мостового выпрямителя, а трехфазный индукционный согласующий элемент выполнен в виде трансформатора 4 ил.
Флг. I
& о
2 Л 6 8 Ю
Фиг .2
Редактор
3-J
Составитель Н.Собачкина
Техред М.МоргенталКорректор М.Куль
К/1
К/1
ЈН
ХУ4
MI Kt/г
LJqjl
I
|
КУб ,
LJK
КУ5 КУ7
| В.И.Гребенников, А.А.Денисов | |||
| Параметрическое регулирование скорости асинхронного тиристорного электропривода с подчиненным управлением в цепи ротора | |||
| Известия высших учебных заведений | |||
| Электротехника | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Асинхронный электропривод | 1970 |
|
SU729794A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
