Изобретение относится к авиационному приборостроению и может быть использовано в бортовом оборудовании летательных аппаратов (л.а.) в качестве средства сигнализации отклонения от заданной высоты эшелона (ССВЭ).
Цель изобретения повышение безопасности полета путем обеспечения достоверной сигнализации высоты эшелона летательного аппарата.
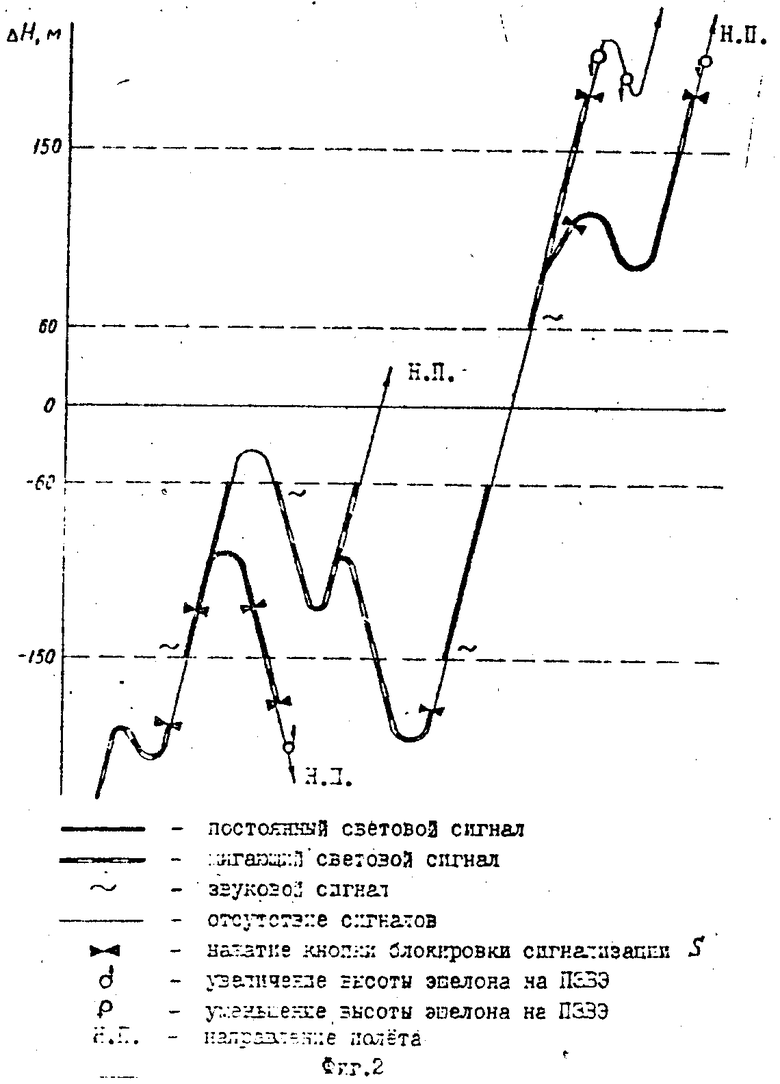
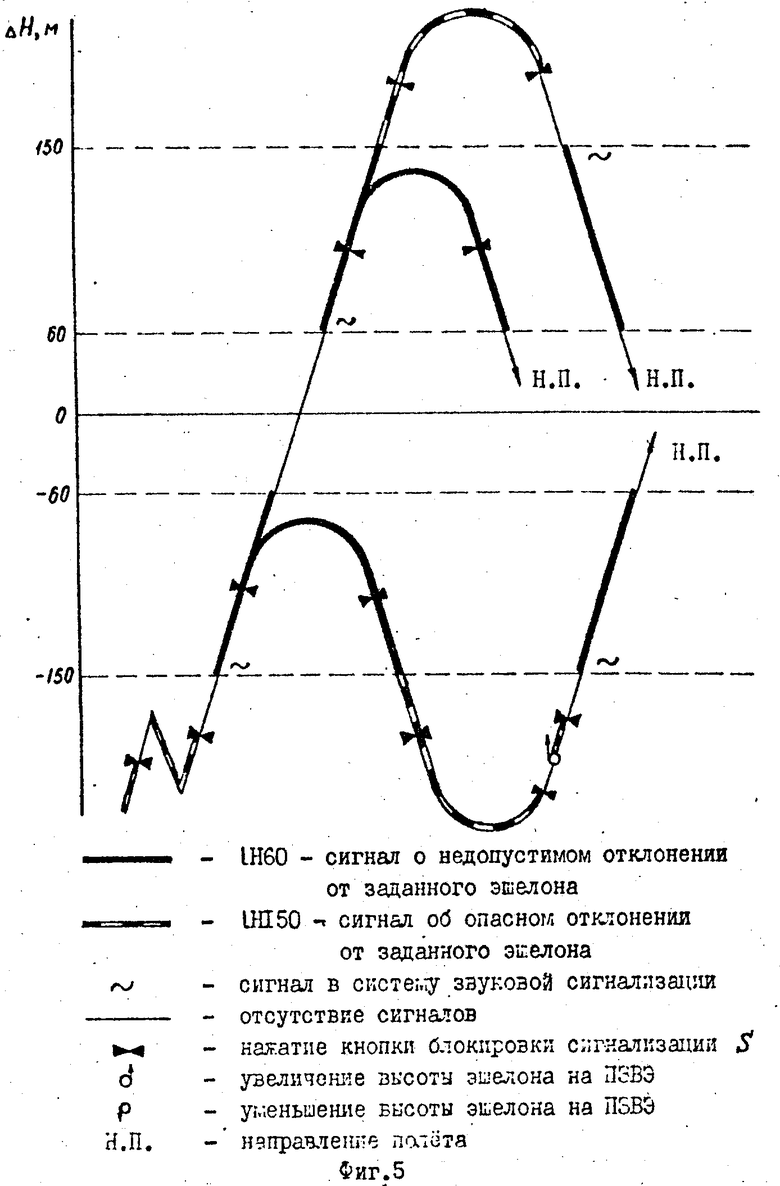
На фиг. 1 представлена полетная карта системы (аналог) сигнализации о достижении заданной высоты самолетом; на фиг. 2 полетная карта системы (прототип) сигнализации высоты эшелонирования; на фиг.3 функциональная схема (предлагаемой) системы сигнализации высоты эшелона ЛП; на фиг.4 функциональная схема блока формирования сигнала "Полет по маршруту"; на фиг.5 полетная карта предлагаемой системы контроля высоты эшелона ЛА.
Система сигнализации высоты эшелона ЛА содержит: датчик высоты 1, первый компаратор 2, первый элемент И 3, блок сравнения 4, второй компаратор 5, первый инвертор 6, задатчик высоты эшелона 7, первое дифференцирующее устройство 8, третий компаратор 9, второй элемент И 10, кнопку блокировки сигнализации S, второй инвертор 11, первый элемент ИЛИ 12, третий элемент И 13, третий инвертор 14, блок формирования сигнала "Полет по маршруту" 15, четвертый элемент И 16, второе дифференцирующее устройство 17, четвертый компаратор 18, второй элемент ИЛИ 19, датчик положения шасси 20, датчик угла отклонения закрылков 21, первый задатчик опорного напряжения 22, второй задатчик опорного напряжения 23, третий задатчик опорного напряжения 24, четвертый задатчик опорного напряжения 25, блок звуковой сигнализации 26, блок регистрации параметров полета 27, блок световой сигнализации 28.
При этом выход датчика высоты 1 соединен с первым входом блока сравнения 4 и с третьим входом блока формирования сигнала "Полет по маршруту" 15, второй вход которого соединен с выходом датчика угла отклонения закрылков 21, выход датчика положения шасси 20 соединен с первым входом блока формирования этапа "Полет по маршруту" 15, выход которого соединен с первыми входами первого 3 и четвертого элемента И 16, выход задатчика высоты эшелона 7 соединен с входом второго дифференцирующего устройства 17 и с вторым входом блока сравнения 4, выход которого соединен с входом первого дифференцирующего устройства 8 и вторыми входами первого 2 и второго 5 компараторов, выход второго задатчика опорного напряжения 23 соединен с первым входом второго компаратора 5, выход которого соединен с третьим входом первого элемента И 3 и с входом первого инвертора 6, выход которого соединен с вторым входом четвертого элемента И 16, выход которого соединен с входом блока регистрации параметров полета 27 и с первым входом второго элемента И 10, выход первого задатчика опорного напряжения 22 соединен с первым входом первого компаратора 2, выход которого соединен с вторым входом первого элемента И 3, выход которого соединен с входом блока звуковой сигнализации и с входом блока световой сигнализации, другой вход которого соединен с выходом второго элемента И 10, выход первого дифференцирующего устройства 8 соединен с вторым входом третьего компаратора 9, первый вход которого соединен с выходом третьего задатчика опорного напряжения 24, а выход соединен с первым входом второго элемента ИЛИ 19, выход второго дифференцирующего устройства 17 соединен с первым входом четвертого компаратора 18, второй вход которого соединен с выходом четвертого задатчика опорного напряжения 25, а выход соединен с вторым входом второго элемента ИЛИ 19, выход которого соединен с входом второго инвертора 11, выход которого соединен с первым входом третьего элемента И 13, кнопка блокировки сигнализации S соединена с первым входом первого элемента ИЛИ 12, выход которого соединен с вторым входом третьего элемента И 13, выход которого соединен с вторым входом первого элемента ИЛИ 12 и с входом третьего инвертора 14, выход которого соединен с вторым входом второго элемента И 10.
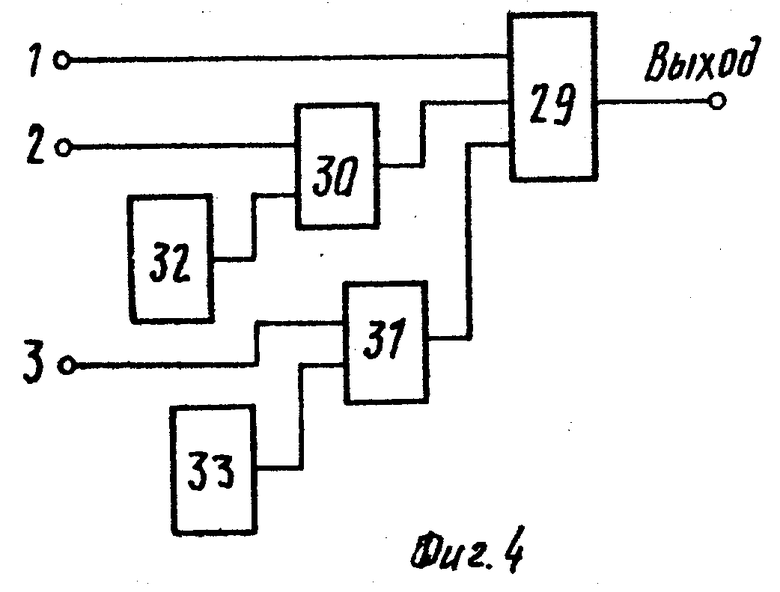
Блок формирования сигнала "Полет по маршруту" 15 содержит (фиг.4): элемент И 29, компаратор 30, компаратор 31, задатчик опорного напряжения 32, задатчик опорного напряжения 33.
Первый вход блока формирования сигнала "Полет по маршруту" соединен с первым входом элемента И 29, второй вход которого соединен с выходом компаратора 30, второй вход которого соединен с выходом задатчика опорного напряжения 32, а первый вход соединен с вторым входом данного блока, третий вход которого соединен с первым входом компаратора 31, второй вход которого соединен с выходом задатчика опорного напряжения 33, а выход соединен с третьим входом элемента "И" 29, выход которого является выходом данного блока 15.
Система работает следующим образом. При полете по маршруту по ЕНЛГ-С по п.3.2 от момента окончания взлета до начала захода на посадку у л.а. шасси и закрылки убраны, высота полета Н более 400 м над уровнем взлетно-посадочной полосы. При убранном шасси от датчика положения шасси 20 на первый вход элемента "И" 29 блока формирования сигнала "Полет по маршруту" (фиг.4) поступает сигнал логической "1". Напряжение от датчика угла отклонения закрылков (δзакр) поступает на первый вход компаратора 30 блока формирования сигнала "Полет по маршруту" (фиг.4). На второй вход компаратора 30 с выхода задатчика опорного напряжения 32 (фиг. 4) подается напряжение, пропорциональное δзакр 2о. Компаратор 30 срабатывает при выполнении условия δзакр < 2о, и логическая "1" с выхода данного компаратора при δзакр < 2о поступает на второй вход элемента И 29 блока формирования сигнала "Полет по маршруту". Напряжение, пропорциональное высоте полета Н, с датчика высоты 1 поступает на первый вход компаратора 31 блока формирования сигнала "Полет по маршруту" (фиг. 4), на второй вход компаратора 31 с выхода задатчика опорного напряжения 33 (фиг. 4) подается напряжение, пропорциональное Н=400 м. Компаратор 31 срабатывает при выполнении условия Н>400 м и с его выхода сигнал логической "1" поступает на третий вход пятого элемента И 29 блока формирования сигнала "Полет по маршруту" фиг.4. Таким образом при полете л.а. по маршруту на все входы элемента И 29 блока формирования сигнала "Полет по маршруту" поступают сигналы логической "1" и в результате на выходе элемента И 29 блока формирования сигнала "Полет по маршруту" и, следовательно, на выходе указанного блока формируется сигнал логической "1", который поступает на первые входы первого 3 и четвертого 16 элементов И, что обеспечивает выдачу выходных сигналов системы с выходов первого 3 и четвертого 16 элементов И на этапе полета по маршруту. Этим обеспечивается автоматическая блокировка выходных сигналов системы на других этапах полета, в частности, на этапах взлета и захода на посадку, где контpоль эшелона не требуется и наличие избыточных сигналов увеличивает загрузку экипажа. Дальнейшую работу системы рассматриваем при полете, л.а. по маршруту, т.е. при наличии логической "1" на первых входах первого 3 и четвертого 16 элементов И. На задатчике высоты эшелона 7 с помощью ручки выставляется требуемое значение высоты эшелона Нзад, которое индицируется на индикаторе задатчика. Напряжение, пропорциональное Нзад, поступает на второй вход блока сравнения 4, на первый вход которого поступает напряжение, пропорциональное текущей высоте Н с датчика высоты 1. С выхода блока сравнения 4 напряжение, пропорциональное модулю разности высот Δ Н= |H-Hзад|, поступает на вторые входы первого 2 и второго 5 компараторов и на вход первого дифференцирующего устройства 8.
На первый вход первого компаратора 2 с выхода первого задатчика опорного напряжения 22 поступает напряжение, пропорциональное Ноп1 60 м, этим обеспечивается срабатывание первого компаратора 1 при выполнении условия ΔH≥ 60 м. На первый вход второго компаратора 5 с выхода второго задатчика опорного напряжения 23 поступает напряжение, пропорциональное Ноп2=150 м, этим обеспечивается срабатывание второго компаратора 5 при выполнении условия ΔH≅ 150 м. С выхода первого дифференцирующего устройства 8 напряжение, пропорциональное производной от модуля разности высот ΔН, поступает на второй вход третьего компаратора. С выхода третьего задатчика опорного напряжения 24 напряжение, близкое к нулевому уровню, подается на первый вход третьего компаратора 9, этим обеспечивается его срабатывание при выполнении ΔH≥ Ноп3, т. е. при ΔH≥ 0 напряжение Ноп3 выбирается из условия защиты от ложного срабатывания третьего компаратора 9 от уровня помех на его втором входе.
При приближении к заданной на блоке 7 высоте эшелона, когда выполняется условие Δ Н>150 м, на выходе второго компаратора 5 сформируется напряжение логического "0", которое поступает на третий вход первого элемента И 3 и вход первого инвертора 6, что обеспечивает сигнал логического "0" с выхода первого элемента И 3 и сигнал логической "1" с выхода первого инвертора 6. В результате на выходе четвертого элемента И 16 сформируется сигнал логической "1", соответствующий наличию логического сигнала LH 150 об опасном отклонении л.а. от заданного эшелона (см. фиг.5). Сигнал LH150 поступает непосредственно на вход блока регистрации параметров полета 27 и на первый вход второго элемента И 10. Состояние выхода второго элемента И 10, сигнал с выхода которого поступает на вход блока световой сигнализации 28, определяется также состоянием сигнала на втором его входе, который обеспечивает возможность блокировки включения световой сигнализации. Блокировка поступления сигнала LH150 на вход блока световой сигнализации 28 с выхода второго элемента И 10, осуществляется нажатием кнопки S, обеспечивающей замыкание цепи первого входа первого элемента ИЛИ 12, представляющего собой совместно с третьим элементом И 13, по существу, RS-триггер. Первый вход первого элемента ИЛИ 12 является входом S триггера, служащим для установки на выходе третьего элемента И 13, выхода триггера, сигнала логической "1".
Первый вход третьего элемента И 13, является входом R триггера, служащим для сброса триггера в исходное состояние, т.е. установку на его выходе логического "0". При наличии "1" на входе R триггера и при нажатии кнопки S на выходе триггера установится сигнал логической "1", который, пройдя через третий инвертор 14, формирует сигнал логического "0" на втором входе второго элемента И 10, чем обеспечивается блокировка поступления сигнала LH150 на вход блока световой сигнализации 28. Сброс триггера в исходное состояние, т. е. разблокировка выдачи сигнала LH150 на вход световой сигнализации 28 происходит автоматически в следующих двух случаях:
при изменении экипажем Нзад на задатчике высоты эшелона 7, на выходе второго дифференцирующего устройства 17, сформируется напряжение, пропорциональное первой производной от Нзад, т.е. Нзад, которое поступает на первый вход четвертого компаратора 18, на второй вход которого подается напряжение Ноп4, обеспечивающего срабатывание четвертого компаратора 18 при минимально медленном изменении экипажем Нзад на задатчике высоты эшелона, т.е. при выполне- нии условия lНзадl ≅ Ноп4(Нзад ≅ Ноп4 и Нзад ≅ -Ноп4) сигнал логической "1" с выхода четвертого компаратора поступает на второй вход второго элемента ИЛИ 19;
при удалении л.а. от заданного эшелона или при движении л.а. параллельно относительно Нзад, т.е. при выполнении условия ΔH≥ 0 срабатывает как описано выше третий компаратор и сигнал логической "1" с его выхода поступает на первый вход второго элемента ИЛИ 19.
В обоих случаях "1" с выхода второго элемента ИЛИ 19 поступает на вход второго инвертора 11, "0" с выхода которого поступает на вход R-триггера первый вход третьего элемента И 13, и устанавливает на выходе триггера "0", который, проходя через третий инвертор, обеспечивает на втором входе второго элемента И сигнал логической "1", и при наличии сигнала логической "1" (т.е. сигнала LH150) на первом входе второго элемента И 10 сигнал LH150 поступает на вход блока световой сигнализации 28.
Таким образом при изменении и экипажем Нзад на задатчике высоты эшелона 7 или при движении л.а. параллельно или при удалении относительно Нзад сигнал LH150 автоматически разблокировывается и, следовательно блокировка сигнала LH150 на входе в блок звуковой сигнализации 28 возможна при постоянной Нзад только в случае приближения л.а. к Нзад. При приближении л.а. к заданной на высоте Нзад, когда выполнится условие 60м ≅H≅ 150м, срабатывает второй компаратор 5 и сигнал логической "1" с его выхода поступает на третий вход первого элемента И 3 и вход первого инвертора 6, сигнал логического "0" с выхода которого поступает на второй вход четвертого элемента И 16 и обеспечивает на его выходе "0" отсутствие сигнала LH150 на входе блока регистрации параметров полета 27. Сигнал логического "0" с выхода четвертого элемента И поступает на первый вход второго элемента И 10 и обеспечивает на его выходе "0" отсутствие сигнала LH150 на входе блока световой сигнализации 28. Когда выполнится условие 60 м ≅ΔH≅ Н150 м и срабатывает и первый компаратор 2 и сигнал логической "1" с его выхода поступает на второй вход первого элемента И 3, в результате на его выходе формируется сигнал логической "1", что соответствует сигналу LH60 о недопустимом отклонении от заданного эшелона, который поступает на вход блока световой 28 и звуковой 26 сигнализации и обеспечивает ее включение. В процессе дальнейшего приближения л.а. к заданной высоте Нзад, когда выполняется условие Δ Н< 60 м, первый компаратор 2 сформирует на выходе сигнал логического "0", при этом на выходе второго компаратора 5 сохраняется сигнал логической "1". В результате этого на выходе первого элемента И 3 сформируется сигнал логического "0", что соответствует отсутствию сигнала LH60, т.е. сигнал LH60 снимается с входов блоков световой 28 и звуковой 26 сигнализации, что обеспечивает ее выключение. Сигнал логической "1" с выхода второго компаратора 5, пройдя через первый инвертор 6, обеспечивает отсутствие сигнала LH150 на выходе четвертого элемента И 16. Если в дальнейшем за счет удаления л.а. от Нзад или изменения Нзад на задатчике высоты эшелона 7 выполнится условие 60 м ≅ΔH≅ 150 м, то как описано, первый компаратор 6 сформирует на выходе сигнал логической "1", что вызовет срабатывание блоков звуковой 26 и световой 28 сигнализации, так как на их входах будет присутствовать сигнал логической "1" с выхода первого элемента И 3 наличие сигнала LH60. Это обеспечивает наличие двух существенно отличных сигналов LH60 и LH150 в зависимости от величины отклонения и при удалении и при приближении л.а. относительно Нзад. Таким образом заявленная система осуществляет:
обеспечение возможности подавления выходного сигнала LH150 на включение световой сигнализации только лишь в случае приближения л.а. к заданной высоте эшелона;
обеспечение автоматического сброса блокировки выходного сигнала LH150 на включение световой сигнализации при удалении или движении параллельно относительно Нзад, а также при изменении Нзад на задатчике высоты эшелона;
обеспечение возможности существенного отличия сигнализации при удалении л.а. от заданной высоты эшелона на 60-150 м и более, чем на 150 м;
обеспечение автоматической блокировки выходных сигналов системы на всех этапах полета, кроме полета по маршруту;
обеспечение возможности выдачи сигнала LH150 при отклонении л.а. более, чем на 150 м от Нзад в блок регистрации параметров полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СИГНАЛИЗАЦИИ ОТКЛОНЕНИЯ ОТ ЗАДАННОЙ ВЫСОТЫ ЭШЕЛОНА И ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2410743C1 |
| СИСТЕМА СИГНАЛИЗАЦИИ ВЫСОТЫ ЭШЕЛОНА ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
SU1823364A1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ АВИАГОРИЗОНТА В ПИЛОТАЖНЫЙ КОМПЛЕКС | 2002 |
|
RU2213938C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МИНИМАЛЬНОЙ СКОРОСТИ ПОЛЕТА САМОЛЕТА | 1991 |
|
SU1829282A1 |
| Устройство для контроля и сигнализации высоты полета самолета | 1990 |
|
SU1817125A1 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| Устройство для управления аэрофотоаппаратом | 1990 |
|
SU1831651A3 |
| ПОЛУАВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОРРЕКЦИИ ВЫСОТЫ ПОЛЕТА ПРИ ВЗЛЕТЕ И ПОСАДКЕ САМОЛЕТНОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО БАРОМЕТРИЧЕСКОГО ВЫСОТОМЕРА | 2012 |
|
RU2522462C2 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |

Изобретение относится к авиационному приборостроению и может быть использовано в бортовом оборудовании летательных аппаратов в качестве средств сигнализации отклонения от заданной высоты эшелона. Целью изобретения является повышение безопасности полета путем обеспечения достоверной сигнализации высоты эшелона летательного аппарата. Для этого в систему вводят блок формирования сигнала "Полет по маршруту" 15, логический элемент И 16, блок дифференцирования 17, компаратор 18, логический элемент ИЛИ 19, датчик положения шасси 20, датчик угла отклонения закрылков 21, задатчик опорного напряжения 25, блок регистрации параметров полета 27. При этом блок формирования сигнала "Полет по маршруту" 15 содержит логический элемент И, компараторы и два задатчика опорного напряжения. 1 з.п. ф-лы. 5 ил.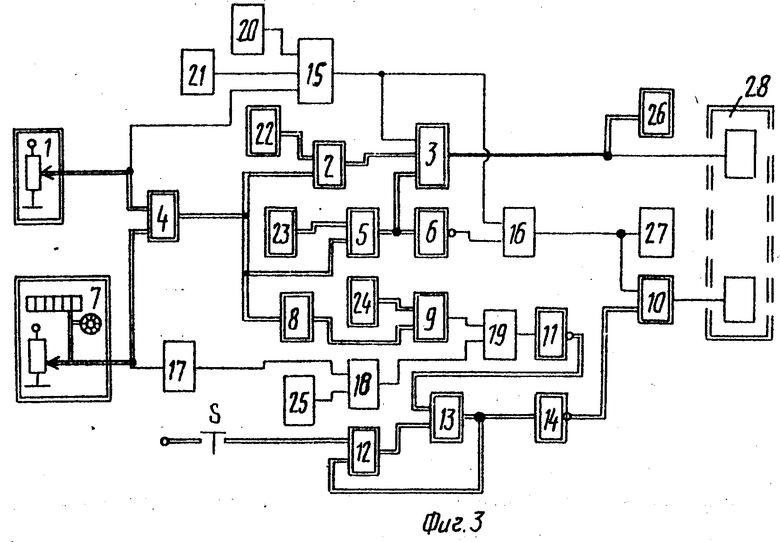
| ССВЭ, Руководство по технической эксплуатации | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
