Изобретение относится к области неразрушающего контроля ультразвуковым или феррозондовым методами и может найти применение в различных отраслях промышленности при дефектоскопии качества изделий, преимущественно непротяженных, например, ниппелей и муфт буровых замков, а также сварных швов (кольцевых) в трубных блоках и т п изделиях тепловых и атомных электростанций
Цель изобретения повышение производительности контроля и увеличения срока службы оборудования
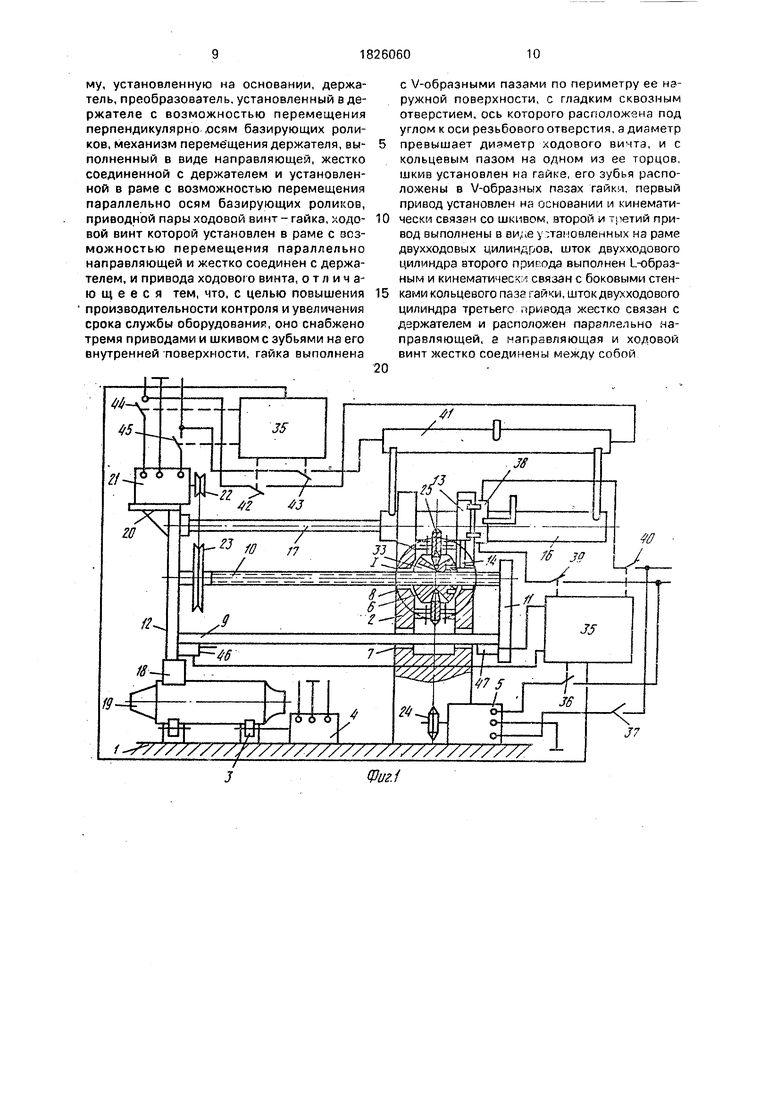
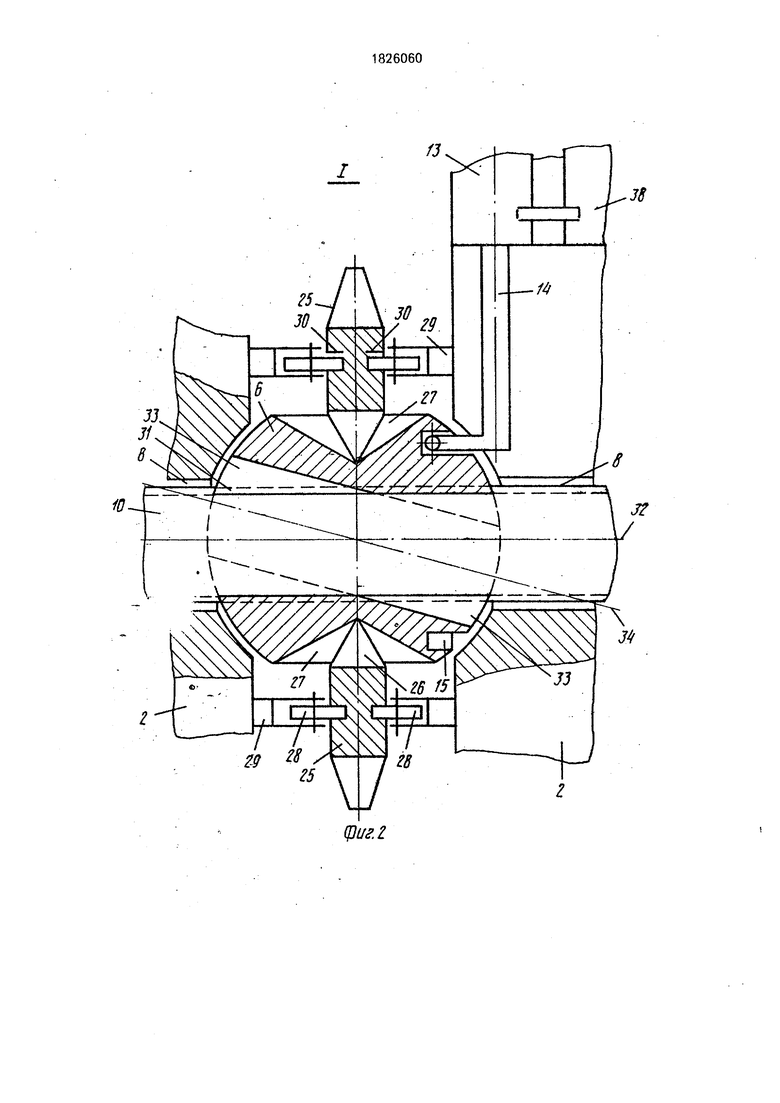
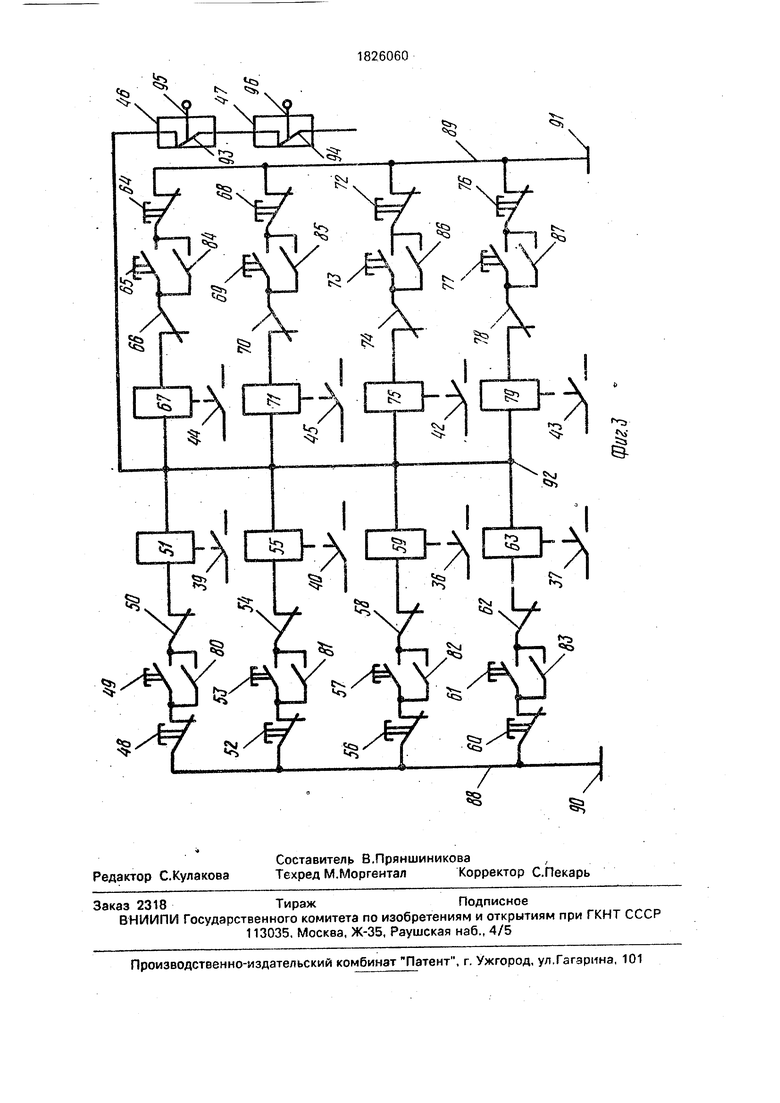
На фиг 1 показано предлагаемое устройство, на фиг 2 - узел I на фиг 1 на фиг 3 - электрическая схема устройства
Устройство для дефектоскопии изделий содержит установленные на основании 1 раму 2, базирующие ролики, образующие призму, механизм привода изделия в виде приводного стенда 3 с двигателем 4. и первый привод в виде двигателя 5 соединенного передачей с гайкой 6 установленной на раме 2. На раме2 в отверстиях 7 и 8 установлены направляющая 9 и ходовой винт Ш соединенные между собой планкой 11 г вы
00
ю
О О
о о
олненным в виде направляющей держатеем 12. На раме 2 установлен второй привод в виде двухходового пневмоцилиндра 13, -образный шток 14 которого установлен в ольцевом пазу 15 гайки 6. Кроме того, на аме 2 установлен третий привод, выполненный в виде второго двухходового цилинра 16, шток 17 которого закреплен на ержателе 12.
На держателе 12 закреплен преобразователь 18с возможностью контактирования контролируемым изделием 19, расположенным на приводном стенде 3.
На кронштейне 20 держателя 12 установлен четвертый привод, выполненный в виде двигателя 21, шкив 22 которого, например, клиноременной передачей соединен со шкивом 23, жестко закреплены на ходовом винте 10.
Связь двигателя 5 первого привода с гайкой 6 осуществлена через шкив 24, соединенный цепью со шкивом 25, венец ступицы которого выполнен зубчатым с зубцами 26, находящимися в V-образных пазов 27 гайки 6.
Для ограничения осевого и радиального перемещения приводной шкие 25 ограничен рейками 28, установленными в вильчатых кронштейнах 29 на раме 2, и контактирующими с приводным шкивом 25 с помощью кольцевых направляющих 30, выполненных в виде пазов на боковых поверхностях шкива 25.
Гайка 6 резьбовым отверстием 31 кон- тактирует с ходовым винтом 10 и совмещается своей продольной осью с продольной осью 32 ходового винта 10, Дополнительно в гайке 6 выполнено сквозное гладкое (без резьбы) отверстие 33 диаметром немного превышающим диаметр ходового винта 10, которое выполнено под определенным углом к резьбовому, продольная ось 34 которого располагается под углом, например, 13-20° к продольной оси резьбового отверстия 31.
Оба отверстия в гайке сопрягаются по линии так, что наименьшее расстояние между линиями сопряжения немного превышает наружный диаметр ходового винта. При этом угле наклона продольных осей резьбового и гладкого отверстий выбираются из условия достаточного угла охвата резьбовым отверстием ходового винта 10 (чем больше угол между упомянутыми осями, тем больше угол охвата), т.е. чем больше усилий приходится на резьбу гайки, тем больше должен быть угол охвата и, следовательно, тем больше угол между упомянутыми осями отверстий гайки 6.
Управление всеми четырьмя приводами осуществляется блоком управления 35: двигатель 5 первого привода управляется контактами 36 и 37; второй привод (пневмоцилиндр
13) управляется с помощью двухлозицион- ного золотникового переключателя 38, соединенного с рабочей средой под давлением (не показано), и контактов 39 и 40 блока 35; третий при вод (двухходовой цилиндр 16)управляется двухпозиционным (двухходовым) золотниковым переключателем 41, соединенным с магистралью рабочей среды под давлением (не показано), с помощью контактов 42,43 блока 35, а двигатель 21 четвертого
привода управляется контактами 44 и 45. Для отключения приводов в крайних положениях на направляющей 9 установлены датчики выключения, выполненные, например, в виде концевых выключателей 46 и 47.
Блок 35 управления (фиг.З) выполнен, например, в виде пульта управления и злек- трошкафа (на черт, не показаны), в которых размещены кнопки управления и реле (электромеханические или электронные), каждое
из которых соединено со своим контактом. Канал управления золотниковым переключателем 38 состоит из параллельно соединенных с электрической магистралью первой цепи, состоящей из последовательно соединенных кнопок 48 и 49. контактов 50, индукционной катушки 51 реле со своими контактами 39, и второй цепи, состоящей из последовательно соединенных кнопок 52 и 53, контактов 54, индукционной катушки
55 реле с контактами 40.
В цепи управления двигателем 5 первого привода установлены по две параллельные цепи: в первой последовательно установлены кнопки 56 и 57, контактов 58 и
индукционной катушки 59 реле с контактами 36; во второй последовательно установлены кнопки 60 и 61, контакты 62 и индукционная катушка 63 с контактами 37.
В цепи управления двигателем 21 четвертого привода установлены две параллельные электрические цепи: первая составлена из последовательно соединенных кнопок 64 и 65, контактов 66, индукционной катушки 67 реле с контактами 44; вторая цепь составлена
из последовательно соединенных кнопок 68 и 69, контактов 70 индуктивной катушки 71 реле с контактами 45.
Цепь управления золотниковым переключателем состоит из двух параллельных
цепей: первая цепь состоит из последовательно электрически соединенных двух кнопок 72 , контактов 74, индукционной катушки 7/5 с реле с контактами 42; вторая цепь состоит из последовательно электричбски соединенных двух кнопок 76 и 77,
контактов 78, индукционной катушки 79 реле с контактами 43.
Кнопки 49, 53, 57, 61, 65, 69. 73, 77 снабжены блокировочными контактами 80, 81, 82, 83, 84, 85, 86. 87, соответственно.
Упомянутые электрические цепи соединены с проводами 88 и 89, заземленными заземлителями 90 и 91 на основании 1 и приводом 92 в электрической цепи концевых выключателей 46 и 47 с контактами 93 и 94 соответственно, каждый из которых снабжен толкателями 95 и 96,
Устройство для контроля изделий работает следующим образом.
На роликоопорный стенд 3 устанавливают контролируемое изделие 19, включают двигатель 4, в результате чего роликоопорный стенд 3 начинает вращать изделие 19. Одновременно с этим в зону контроля с помощью держателя 12 подводят преобразователь 18, который закреплен на его торце и соединен с дефектоскопической аппаратурой (не показано). Подвод держателя 12 с преобразователем 18 в зону контроля изделия 19 осуществляется одним или несколькими приводами. В первом случае с помощью втдрого привода, а именно, двухходовым пневмоцилиндром 13 гайку 6 выводят из резьбового зацепления (отверстие 31 резьбовое) с ходовым винтом 10 и устанавливают гладкое отверстие 33 соосно с ходовым винтом 10. Нажимают кнопку 49, в результате чего нормально замкнутые контакты кнопки 48 и контакты 50 включаются индукционная катушка 51, реле, контакты 39 которого блока 35 управления замыкают электрическую цепь управления золотниковым переключателем 38, при этом кнопку 49 блокируют контакты 80 реле с индуктивной катушкой 51, а контактны 54 в этом случае размыкаются, что исключает включение реле с катушкой 55 индуктивности. Замыкание контактов 39 приводит к перемещению зо-, лотника (не показано) в золотниковом переключателе 38 так, что магистраль рабочей среды под давлением соединяется с той полостью цилиндра 13, которая обеспечивает втягивание L-образного штока 14 в корпусе цилиндра 13. Одновременно с этим блоком управления 35 замыкается контакт 36 и включается двигатель 5 первого привода, вращение от которого через шкив 24 и привод передается на приводной шкив 25. Этот шкив 25 передает вращение гайке 6, т.к. с последней он находится в зубчатом зацеплении с помощью зубцов 26 зубчатой ступицы шкива 25 и соответствующих им впадин 27 V-образной формы. В этом случае гайка 6 начинает вращаться на ходовом винте 10 и в раме 2, установленной на основании.
После первого оборота гайка 6 поворачивается поперек вращения с помощью двигающегося цилиндра 13, закрепленного на раме 2, L-образного штока. Это приводит к мере- 5 мещению оси 34 гладкого отверстия 33 на место оси резьбового отверстия 31, при этом продольная ось резьбового отверстия устанавливается под к прпдолц ом оси 32 ходового 10, з ось 34 гладкого 0 отверстия совпадает с продольной осью ходового винта 10, Погле выходч гэйкм 6 из резьбового зацепления г ходовым винтом 10 блоком управления 35 подается команда на замыкание коктвк-а 42, пчгем нажатия
5 кнопки 73, в результате чего соединяются провода 89 и 92 электрической цепью нормально замкнутых контактов кнопки 72, контактов 74 и обмотки катушкм 75 индуктивности реле замыкаются, как описывалось выше,
0 блокировочные контакты 86 и в цепи катушки 79 размыкаются контакты 78, е результате золотниковым переключателем 41 соединяется ма(истрал - рабочей среды и под давлением с той полостью цилиндра 16
5 третьего Привода, которая обеспечивает выдвижение штока 17, жестко закрепленного на держателе 12. В результате этого, гайка 6 выведена из резьбового ззцеппенмя с ходовым винтом 10, последний вместе с Она0 правляющей 9, начнут перемещаться в соответствующих отверстиях 8 и 7 рямы 2 в зону контроля с помощью штока 17 цилиндра 16, закрепленного на раме 2. Это происходит потому, что они соединены с держателем 12,
5 а ходовой винт и .вправляющая дополнительно - с планкой 11. Это перемещение будет продолжаться до тех пор пока не выключится третий привод, т е пока не сработает датчик 47 положения (концевой выключатель),
0 который дает команду блоку управления 35 на выключение золотникового переключателя путем размыкакия контактов 94 с помощью толкателя 96 обеспечивается провод 92, что обеспечивает выключение1 всех ра5 нее включенных катушек индуктивности реле и их контактов, в том числе и размыканию контактов 42: В этом случае золотник перекрывает магистраль рабочей среды, например, пружинным приводом (не показан), в
0 результате чего нажимают кнопку 57, что приводит к соединению проводов 88, 92. Перемещение держателя 12 с преобразователем 18 прекращается через нормально замкнутые кнопку 56 и контактов 58 и вклю5 чение индукционной катушки 59 реле блока 35 управления, при этом замыкаются контакты 36. Одновременно с этим подается команда на выключение первого привода, т.е. блоком управления 35 подается команда, на размыкание контакта 36, который может быть в этом случае выключен значительно раньше (после расцепления гайки с вин- том 10).
Для осуществления второго варианта перемещения держателя 12с преобразова- 5 телем 18 в зону контроля изделия 19, находящегося на -стенде 3, осуществляется следующим образом.
В этом случае L-образный шток 14 пнев- моцилиндра 13 второго привода должен 10 быть полностью выдвинут, для этого по команде блока 35 управления блока путем нажатия кнопки 53 замыкается электрическая цепь проводов 88 и 92 срабатывает катушка 55 индуктивности и ее реле замыкает кон- 15 такты АО и блокировочные контакты 81 кнопки 53, при этом размыкаются контакты 50 в цепи реле с катушкой индуктивности 51, замыкается контакт 40, обеспечивающий подачу рабочей среды через золотниковый 20 переключатель 38 в ту полость цилиндра 13, которая обеспечивает выдвижение полностью L-образного штока 14, что обеспечивает совмещение продольной оси резьбового отверстия 31 с продольной осью 32 ходово- 25 го винта 10, при этом, как и в предыдущем случае, торец L-образного штока 14 постоянно находится в кольцевой направляющей 15 гайки 6, обеспечивая поперечный разворот последней. После этого включается 30 электродвигатель 5 первого привода или электродвигатель 21 привода винта и, одновременно с одним из них, включается двухходовой цилиндр 16 третьего привода. Эти включения осуществляются блоком 35 уп- 35 рэвления, т.е. замыкаются как и в первом случае контакты 36 или 44 и контакт 43. В результате чего гайка 6, вращаясь, своим приводом начинает перемещать винт 10 и совместно со штоком 17 держатель 12 с 40 преобразователем 18 в зону контроля, если разомкнут контакт 36 двигателя 5, а оамкнут контакт 44 двигателя 21, вращающийся момент которого через его шкив 22 и передачу передается на приводной шкив 23 и далее 45 на вращение ходового винта 10, который в этом случае будет, вращаясь перемещаться относительно неподвижной гайки 6, и вместно со штоком 17 цилиндра 16 будет перемещать держатель 12 с преобразовате- 50 лем в зону контроля. Перемещение будет продолжаться до включения датчика 47 положения (концевого выключателя) или подается команда оператором на выключение блоком 35 управления такого перемещения. 55 В результате размыкаются контакты 36 (44), что приводит к выключению двигателя 5 (21) и прекращению вращения гайки 6 (винта 10), а при замкнутом контакте 44, который в этом случае размыкается, приводит к выключению двигателя 21 и одновременно с ними размыкается контакт 42 золотникового переключателя 41, золотник которого возвращается в исходное положение, что приводит к перекрытию магистрали рабочей среды с полостью цилиндра 16.
После того как преобразователь 18 установлен в зону контроля, его подводят к поверхности вращающегося контролируемого изделия 19, устанавливают необходимую скорость перемещения держателя 12с преобразователем 18 относительно поверхности контролируемого изделия 19. Для этого с помощью регуляторов (не показано) устанавливают определенную разность скоростей вращения приводных шкивов 25 и 23, соответственно, гайки 6 и ходового винта 10. Приводят во вращение в одну сторону шкивы 24 и 22 двигателями 5 и 21 приводов первого и четвертого, одновременно с этим включают третий привод (цилиндр 16). Для этого блоком 35 управления замыкают контакты 37,45 и 43, В этом случае осуществляется реверс упомянутых приводов и преобразователь 18 перемещается относительно вращающегося изделия 29 стендом 3 с помощью двигателя 4.
Поиск дефектов (не показан) проводится по винтовой линии. В этом случае ходовой винт 10 и направляющая 9 будут перемещаться относительно рамы 2 с держателем 12 и планкой 11 в отверстиях 8 и 7. Такое перемещение заканчивается при срабатывании концевого включателя 46 размыкаются контакты 93 толкателем 95, разрывается цепь провода 92, выдается команда на выключение блоком 35 управления контактов 37, 45 и 43. В этом случае три привода выключаются и цикл контроля может быть повторен, т.е. проконтролированное изделие 19 удаляется со стенда 3, а на его место устанавливается другое, подлежащее контролю. Держатель с преобразователем в этом случае перемещаются одним из вышеприведенных способов в зону контроля при заблокированных контактах 93 и разблокированных контактах 94 концевого выключателя 47.
В процессе вращения приводного шкива 25, последний может перемещаться в радиальном и осевом направлениях. Для ограничения такого перемещения в кольцевых пазах 30 установлены ролики 28, закрепленные в вильчатых кронштейнах 29, которые установлены на раме 2.
Формула изобретения
Устройство для контроля изделий, содержащее основание, установленные на основании базирующие ролики, образующие призму, механизм привода изделия, раму, установленную на основании, держатель, преобразователь, установленный в держателе с возможностью перемещения перпендикулярно леям базирующих роликов, механизм переме щения держателя, выполненный в виде направляющей, жестко соединенной с держателем и установленной в раме с возможностью перемещения параллельно осям базирующих роликов, приводной пары ходовой винт - гайка, ходовой винт которой установлен в раме с возможностью перемещения параллельно направляющей и жестко соединен с держателем, и привода ходовою винта, отличающееся тем, что, с целью повышения производительности контроля и увеличения срока службы оборудований, оно снабжено тремя приводами и шкивом с зубьями на его внутренней поверхности, гайка выполнена
0
5
0
с V-образными пазами по периметру ее наружной поверхности, с гладким сквозным отверстием, ось которого расположена под углом к оси резьбового отверстия, а диаметр превышает диаметр ходового вичтз, и с кольцевым пазом на одном из ее торцов, шкмв установлен на гайке, его зубья расположены в V-образных пазах гайки, первый привод установлен на основании и кинематически связан со шкивом, второй и привод выполнены в ггановленных на раме двухходовых цилиндров, шток двухходового цилиндра второго пригода выполнен L-образ- ным и кинематическ i связан с боковыми стенками кольцевого паза гайки, шток двухходового цилиндра третьего привода жестко связан с держателем и расположен параллельно направляющей, а направляющая и ходовой винт жестко соединены между собой

| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| РАЗЪЕМНАЯ КОНСТРУКЦИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2665132C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2653625C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) И МЕХАНИЧЕСКАЯ СОЕДИНИТЕЛЬНАЯ СИСТЕМА ДЛЯ РАЗЪЕМНОГО СОЕДИНЕНИЯ СДВОЕННЫХ ПОВОРОТНЫХ ПРИВОДНЫХ ВАЛОВ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2676439C2 |
| Стенд для измерения силовых параметров в резьбовых соединениях | 1991 |
|
SU1781570A1 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2014 |
|
RU2678366C2 |
| Устройство для пропитки слоистых изделий связующим | 1987 |
|
SU1442415A1 |
Изобретение относится к области неразрушающего контроля изделий ультразвуковым илЬ феррозондовым способом и может быть использовано в различных отраслях промышленности при дефектоскопии, преимущественно непротяженных изделий Цель изобретения - повышение0 производительности контроля непротяженных изделии или кольцевых швов при одновременном увеличении срока службы привода путем облегчения режима работы устройства. Поставленная цель достигается тем, что устройство для контроля изделий снабжено тремя приводами и шкивом с зубьями на его внутренней поверхности гайка выполнена с V-образными пазами по периметру ее наружной поверхности, с гладким сквозным отверстием, ось которого расположена под углом к оси резьбового отверстия, а диаметр превышает диаметр ходового винта и с кольцевым пазом на одном из ее торцов, шкив установлен на гайке, его зубья расположены в V-образных пазах гайки Первый привод установлен на основании и кинематически связан со шкивом, второй и третий приводы выполнены в виде установленных на раме двухходовых цилиндров, шток двухходового цилиндра второго привода выполнен V-обрэзным и кинематически связан с боковыми стенками кольцевого паза гайки, шток двухходового цилиндра третьего привода жестко связан с держателем и расположен параллельно направляющей а направляющая и ходовой винт жестко между собой 3 ил
/
фиг. Z
38
%
Ч - ч
Pefc
..
и L«J |-I
А А А
с.
45
Ч
& I
ь
%
V v1 v
f-, f 6L
л
§/Y &S/Y в,/
%
Ј
N
| Установка для ультразвукового контроля сварных швов изделий сложной формы | 1985 |
|
SU1272222A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
