Изобретение относится к весоизмерительной технике.
Цель изобретения повышение точности.
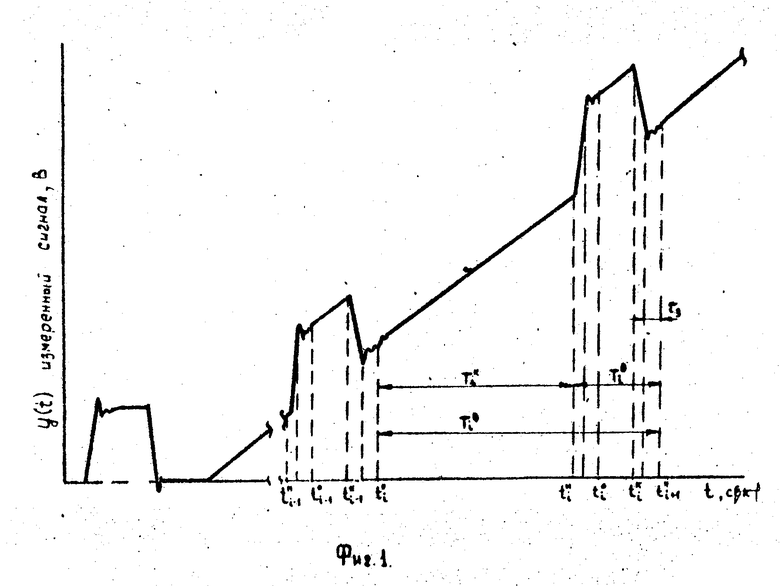
На фиг. 1 изображен график набора материала при дозировании описываемым способом; на фиг. 2 блок-схема устройства, реализующего способ.
Способ измерения массы материала для дозирования заключается в следующем.
В процессе дозирования многократно добавляют эталонный груз к массе дозируемого материала, формируют управляющие команды на исполнительную часть системы дозирования, пропорциональные значению и знаку сигнала рассогласования между заданным и текущим значениями массы дозируемого материала, измеряют косвенный сигнал (косвенно характеризующий производительность дозаторов), формируют на основе этого сигнала дополнительный сигнал о массе дозируемого материала без эталонного груза, оперативно уточняют пересчетные коэффициенты зависимости, характеризующей связь между основным и дополнительными сигналами о массе дозируемого материала, прогнозируют сигнал о массе дозируемого материала без эталонного груза при каждом добавлении эталонного груза, оценивают момент времени забухания колебаний, вызванных добавлением и снятием эталонного груза, определяют при каждом добавлении эталонного груза чувствительность устройства измерения масс с учетом основного и дополнительного сигналов о массе дозируемого материала и непрерывно определяют текущее значение массы дозируемого материала. При этом на каждом i-м цикле коррекции, представляющем собой сумму интервалов времени между добавлениями эталонного груза и времени добавления эталонного груза, оперативно уточняют значение пересчетного коэффициента k (t) по выражению
k(t) 

 × δУд(ζ)dζ ko(t) k(i) при ti-1n < t < tiн; tiн ≅t≅tiн, где k(t) переменный коэффициент передачи, связывающий сигналы yi(t) и δ yд(t);
× δУд(ζ)dζ ko(t) k(i) при ti-1n < t < tiн; tiн ≅t≅tiн, где k(t) переменный коэффициент передачи, связывающий сигналы yi(t) и δ yд(t);
tiн, tin момент времени соответственно начала i-го цикла коррекции и i-го добавления эталонного груза;
γk настроечный параметр, введенный для уменьшения влияния помех оценивания δy(t) и δyд(t) на результат вычисления k(t)γk 0,1-2;
δ y(t), δ yд(t) траектория отклонений основного y(t) и дополнительного yд(t) сигналов от их базовых тракторий, рассчитанных на каждом цикле коррекции по значениям этих сигналов в моменты времени tiнпо оценкам их скорости на предыдущем цикле коррекции, при этом
ζ промежуточная переменная интегрирования в пределах от t-tin до t.
При каждом добавлении эталонного груза прогнозируемое значение массы дозируемого материала без эталонного груза рассчитывают как сумму значений основного сигнала, взятого в момент времени добавления эталонного груза, произведения оценки средней скорости изменения этого сигнала, полученной на интервале времени между добавлениями эталонного груза, на длительность его добавления и составляющей в виде произведения пересчетного коэффициента на отклонение дополни- тельного сигнала от его базовой траектории.
Момент времени затухания колебаний оценивают, отождествляя его с текущим временем, когда расчетная величина интервала на заранее выбранном скользящем интервале времени от модуля основного сигнала о массе станет меньше заранее заданной величины.
Переменную чувствительность устройства измерения масс рассчитывают при каждом добавлении эталонного груза как отношение интеграла от разности основного измеренного и прогнозируемого сигналов о массе дозируемого материала, взятого на интервале времени между моментами конца затухания колебаний и снятия эталонного груза, к произведению массы эталонного груза на длину этого интервала времени.
Текущее значение массы дозирующего материала определяют непрерывно по выражению
X(t)
 +
+  где y(tin), y(tiн) значения основного сигнала о массе дозируемого материала в момент времени начала i-го и (i-1)-го цикла коррекции;
где y(tin), y(tiн) значения основного сигнала о массе дозируемого материала в момент времени начала i-го и (i-1)-го цикла коррекции; (t)(t) сигнал, принимающий на интервале времени между добавлениями эталонного груза непосредственно измеренные значения, на интервале времени добавления эталонного груза прогнозируемые значения основного сигнала о массе дозируемого материала, т. е.
(t)(t) сигнал, принимающий на интервале времени между добавлениями эталонного груза непосредственно измеренные значения, на интервале времени добавления эталонного груза прогнозируемые значения основного сигнала о массе дозируемого материала, т. е.
 (t)
(t) 



I промежуточная временная суммирования, равна 1, 2, 3, I;
b(I) оценка чувствительности устройства измерения масс на i-м цикле коррекции;
b(i) оценка чувствительности устройства измерения масс на i-м цикле коррекции, найденная в соответствии с выражением (i)
(i) 

Сущность предлагаемого способа измерения заключается в многократном пульсирующем тестировании устройства измерения масс, непрерывном измерении косвенного сигнала, формировании с его использованием дополнительной оценки масс дозируемого материала и многократном оценивании переменной чувствительности измерения масс, что позволяет непрерывно с учетом характерных особенностей изменения основного сигнала определять текущие значения масс дозируемого материала с большей точностью по сравнению с прототипом, особенно на интервалах работы устройства измерения масс при добавленном эталонном грузе, где в прототипе возникают наиболее существенные ошибки. Длительность Тодобавления эталонного груза определяется в зависимости от инерционности исполнительного механизма для добавления эталонного груза, а также от времени τ3 затухания колебаний, вызванных добавлением и снятием эталонного груза θ, например Tθ= 3τ3+ 2 где τn интервал времени добавления (снятия) эталонного груза.
где τn интервал времени добавления (снятия) эталонного груза.
Значение массы эталонного груза θ выбирается равным одной восьмой одной десятой доли от среднего значения заданной массы дозируемого материала. Интервал времени Tk между добавлениями эталонного груза выбирается, например, как Тk (3-5) θ /Vср, где Vср средняя скорость дозирования материала.
На фиг. 1 приняты следующие обозначения; Тiо длительность i-го цикла коррекции; Тik интервал времени между добавлениями эталонного груза массой θ на i-м цикле коррекции, совпадающий с интервалом времени коррекции коэффициента ko(i); Тiθ длительность добавления эталонного груза на i-м цикле коррекции; τ3- время затухания колебаний, вызванных добавлением или снятием эталонного груза, значение τ3 находится в зависимости от инерционности исполнительного механизма эталонного груза и его массы θ tiн, tin, tio, tik моменты времени соответственно начала i-го цикла коррекции, добавления эталонного груза θ, оценивая массы дозируемого материала с добавлением эталонным грузом и его снятия; y(t) основной сигнал, измеренный в текущий момент времени.
На фиг. 2 приняты следующие обозначения: U(t) косвенный сигнал о производительности дозатора, например, подводимый к обмоткам электромагнитов, для вибрационного электромагнитного питателя; y(t), tд(t) основной и дополнительный сигналы о массе дозируемого материала.
Устройство, реализующее способ для случая порционного дозирования, состоит из грузоподъемного бункера 1, тензодатчиков 2, исполнительных механизмов 3, эталонных грузов 4, приводов 5 электромагнитного вибропитателя, измерителя 6 напряжения, привода 7, интегратора 8, блока 9 формирования циклов коррекции, блока 10 расчета базовой траектории yдб(t), блока 11 расчета базовой траектории yб(t), блока 12 расчета траектории δ yд(t), блока 13 расчета траектории δ y(t), блока 14 расчета корректировок для коэффициента ko(t), блока 15 задержки, блока 16 расчета скорости изменения сигнала y(t), блока 17 памяти, прогнозатора 18, блока 19 расчета признака Iр, задатчика 20, блока 21 расчета чувствительности b(I), блока 22 расчета текущего значения массы дозируемого материала, блока 23 формирования сигнала  (t)(t), управляющего блока 24, задающего блока 25.
(t)(t), управляющего блока 24, задающего блока 25.
Способ изменения массы материала при дозировании реализуется следующим образом.
Градуировочная характеристика нелинейных и нестационарных систем измерения масс в рабочем диапазоне может быть представлена кусочно-линейной аппроксимацией. При этом каждому интервалу аппроксимации сопоставляется своя чувствительность b(i). Для определения численных значений b(i) непосредственно в процессе набора материала через интервал времени Тk производят добавления на время Т θ эталонного груза θ. Характер изменения сигнала при добавлении и снятии эталонного груза приведен на фиг. 1. Наличие затухающих колебаний при подаче тестирующих воздействий эталонным грузом θ приводит к существенному усложнению процедуры обработки сигнала y(t) на интервале времени Тθ и к увеличению его длительности. Кроме того, непосредственное использование сигнала y(t) на интервале времени τ3 неизбежно ведет к появлению больших погрешностей в оценке текущей массы х(t) дозируемого материала. Это обуславливает необходимость использования на интервале Тθкосвенной оценки массы дозируемого материала по сигналу yд(t) как для расчета значений b(i), так и х(t). В качестве косвенного сигнала U(t) может быть принято, в частности, для вибрационного электромагнитного питателя напряжение, подводимое к обмоткам электромагнитов. Это напряжение U(t) измеряется с помощью измерителя 6 напряжения и подается на вход интегратора 8, на выходе которого формируется в соответствии с выражением
Yд(t) ko U(ζ)dζ, 0≅ t≅ Tд где Тд длительность цикла дозирования, сигнал yд(t), пропорциональный массе материала в процессе набора. Обнуление интегратора 8 осуществляется по сигналу на отключение питателя от управляющего блока 24. Для случая непрерывного дозирования с использованием, например, конвейерного весоизмерителя напряжение U(t) поступают на вход интегратора с отсечкой 8. На выходе интегратора с отсечкой 8 формируется сигнал
U(ζ)dζ, 0≅ t≅ Tд где Тд длительность цикла дозирования, сигнал yд(t), пропорциональный массе материала в процессе набора. Обнуление интегратора 8 осуществляется по сигналу на отключение питателя от управляющего блока 24. Для случая непрерывного дозирования с использованием, например, конвейерного весоизмерителя напряжение U(t) поступают на вход интегратора с отсечкой 8. На выходе интегратора с отсечкой 8 формируется сигнал
Yд(t) ko U(ζ)dζ где То время отсечки. С помощью тензодатчиков 2 одновременно формируется основной сигнал y(t) о массе дозируемого в грузоподъемный бункер 1 материала. В блоках 10 и 11 на базе соответствующих сигналов yд(t) и y(t) непрерывно формируются базовые траектории yдiδ (t) и yiδ (t) для каждого i-го цикла коррекции:
U(ζ)dζ где То время отсечки. С помощью тензодатчиков 2 одновременно формируется основной сигнал y(t) о массе дозируемого в грузоподъемный бункер 1 материала. В блоках 10 и 11 на базе соответствующих сигналов yд(t) и y(t) непрерывно формируются базовые траектории yдiδ (t) и yiδ (t) для каждого i-го цикла коррекции:
Y × (t-t
× (t-t
Y × (t-t
× (t-t
tiн ≅t≅ tik где i номер цикла коррекции;
tiн, tik моменты времени начала и конца (i-1)-го цикла коррекции. Значения указанных моментов времени формируются в блоке 9 формирования циклов коррекции.
В блоках 12 и 13 расчета траекторий δyд(t) и δ y(t) непрерывно рассчитываются отклонения текущих значений сигналов yд(t) и y(t) от их базовых значений в соответствующие моменты времени, т. е.
δ yд(t) yд(t) yдiδ (t);
δ yi(t) t(t) yiδ (t);
ti ≅t≅ tik.
В блоках 14 расчета корректировок для пересчетного коэффициента ko(i) и 15 задержки осуществляется, начиная с момента времени yiн и заканчивая в tin, оперативное уточнение значений пересчетного коэффициента ko(i).
В блоке 16 расчета скорости изменения сигнала y(t) с использованием зафиксированных ранее в моменты времени tiн и tin в блоке 17 памяти значений y(tiн) и y(tin) выходного сигнала тензодатчиков 2 и сигналов, пропорциональных моментам времени tiн и tin, рассчитывается в момент времени tin по сигналу от блока 9 формирования циклов коррекции оценки скорости изменения основного сигнала y(t) на интервале времени Тik.Сигнал пропорциональный оценке этой скорости, подается на вход прогнозатора 18. Кроме того, на вход прогнозатора 18 поступают сигналы с выхода блока 14 расчета корректировок для коэффициента ko(i) и с выхода блока 12 расчета траектории δyд(t). В прогнозаторе реализуется процесс вычисления сигнала, пропорционального прогнозируемым значениям массы дозируемого материала: (t)= y(t
(t)= y(t × (t t
× (t t
tin ≅t≅ tiн.
В блок 19 расчета признака Iр поступают сигнал с выхода задатчика 20, пропорциональный значению А, а сигнал y(t) с выхода тензодатчиков 2. С использованием этих сигналов в блоке 19 сразу же после добавления эталонного груза, команда на включение привода 7 которого формируется в блоке 9 формирования циклов коррекции, осуществляются расчет признака
Ip(t)  IYi(ζ)Idζ и его сравнение с сигналом, пропорциональным значению А. В случае выполнения условия
IYi(ζ)Idζ и его сравнение с сигналом, пропорциональным значению А. В случае выполнения условия
Iр(t) A, tin ≅t≅ tio, что соответствует затуханию колебаний сигнала о массе, вызванных добавлением эталонного груза θ, выдается сигнал на включение блока 21 расчета чувствительности b(i) устройства измерения масс. В блок 21 поступают сигналы y(t) с выхода тензодатчиков 2 сигналы, пропорциональные моментам tik и tiо, а также сигнал прогнозируемых значений yi(t) массы дозируемого материала. Расчет переменной чувствительности устройства измерения масс осуществляется в блоке 21 на интервале времени [tio, tik] в соответствии выражением
b(i)  где b(i) чувствительность устройства измерения масс на i-м цикле коррекции;
где b(i) чувствительность устройства измерения масс на i-м цикле коррекции;
θ значение массы эталонного груза;
tio, tik время начала оценивания значений b(i) и снятия эталонного груза на i-м цикле коррекции.
Расчет значений b(i) осуществляется в течение всего интервала времени добавления эталонного груза и заканчивается в момент его снятия, осуществляемого по сигналу от блока 9 формирования циклов коррекции.
После снятия эталонного груза в момент времени tik опять включается в работу блок 19 расчета признака Iр(t):
Ip(t)  IYi(ζ)Idζ и начинается его сравнение с величиной А. В случае выполнения условия
IYi(ζ)Idζ и начинается его сравнение с величиной А. В случае выполнения условия
Iр(t) A, tik ≅t≅ ti+1н. что соответствует затуханию колебаний сигнала о массе, вызванных снятием эталонного груза θ выдается сигнал для включения в работу блока 14 расчета корректировок для коэффициента ko(i+1) на (i+1)-м цикле коррекции. Далее работа устройства на (i+1)-м цикле осуществляется описанному для i-го цикла.
Реализация пульсирующих тестовых воздействий эталонным грузом в процессе дозирования материалов обуславливает наличие повторяющихся операций (циклов коррекции), связанных с оперативной коррекцией значений как пересчетного коэффициента ko(i), так и чувствительности b(i) устройства измерения масс. Управление процессом формирования циклов коррекции осуществляется с помощью блока 9 формирования циклов коррекции. Рассмотрим его работу в случае порционного дозирования. Время выдачи команды на включение питателя отождествляется с моментом времени tiн начала первого цикла коррекции пересчетного коэффициента ko(i). В этот момент выходной сигнал блока 9 включает в работу блок 14 расчета корректировок для коэффициента ko(i). Длительность интервала коррекции коэффициента ko(i) определяется исходя из соотношения Тk (3-5) θ /Vср. В случае, когда текущее время t, формируемое на выходе входящего в состав блока 9 таймера, больше величины Тk, сигнал с выхода блока 9 подается на привод управления исполнительным механизмом эта- лонного груза для его включения (соответствует моменту времени tin) и одновременно на вход блока 19 расчета признака Iр, включая блок 19. В момент tio, когда Iр≅А, выходной сигнал блока 19 поступает на вход блока 9, где оценивается величина времени затухания τ3 tio -tin и рассчитывается момент времени tik tio + 2 τ3. Когда текущее время t на выходе таймера станет равным значению tik, с выхода блока 9 подается сигнал в блок 21 расчета чувствительности b(i) устройства измерения масс на запоминающие текущего значения b(i) и одновременно в период 7 для снятия эталонного груза, а также на вход блока 19 для его повторного включения. После выполнения условия Iр ≅А с выхода блока 19 на вход блока 9 вновь подается сигнал, что является признаком конца первого и начала второго цикла коррекции, т. е. текущий момент времени при появлении этого сигнала отождествляется с tnн.
В течение всего периода набора материала с использованием уточняемых на каждом цикле коррекции значений b(i) и сигналов y(t), формируемых с помощью блока 23 формирования сигнала y(t), осуществляется в блоке 22 расчета текущего значения массы дозируемого материала непрерывный расчет текущих значений массы в соответствии с выражением
X(t)  +
+  где
где  (t)
(t) 



 (i)
(i) 
 при условии y(tiн) y(toн) соответствует массе тары, I промежуточная переменная (I 1, 2, 3, 1).
при условии y(tiн) y(toн) соответствует массе тары, I промежуточная переменная (I 1, 2, 3, 1).
Рассчитываемое таким образом текущее значение массы набираемого материала Х(t) сравнивается в управляющем блоке 24 с заданным значением порции материала Х*, пропорциональный сигнал которому формируется в задающем блоке 25. В случае выполнения неравенства
Х* Х(t) *δ, где δ* заданное упреждение на останов дозирования, в управляющем блоке 24 формируется команда на закрытие впускного затвора. Одновременно с этим в блоке 9 поступает сигнал с выхода блока 24, являющийся признаком окончания набора и обнуления номера цикла коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕСОВОГО ПОРЦИОННОГО ДОЗИРОВАНИЯ | 1989 |
|
RU2027152C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2239869C2 |
| Цифровое устройство управления весовым дозированием | 1983 |
|
SU1177680A1 |
| Способ весового дозирования сыпучих материалов | 1989 |
|
SU1615566A2 |
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1971 |
|
SU422971A1 |
| Способ управления процессом выжига кокса в многопоточной пиролизной печи | 1989 |
|
SU1666517A1 |
| СПОСОБ КОРРЕКТИРОВКИ ДОЗИРУЕМОГО КОЛИЧЕСТВА ВОССТАНОВИТЕЛЯ ДЛЯ СЕЛЕКТИВНОГО КАТАЛИТИЧЕСКОГО ВОССТАНОВЛЕНИЯ | 2010 |
|
RU2520806C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ИЗМЕРИТЕЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ И КОНТРОЛИРУЕМОЙ ПОВЕРХНОСТЬЮ В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2007 |
|
RU2327104C1 |
| Способ весового дозирования сыпучих материалов | 1985 |
|
SU1307241A1 |
| Цифровое устройство управления весовым дозированием | 1984 |
|
SU1167440A1 |

Изобретение относится к весоизмерительной технике и позволяет повысить точность измерения. В процессе дозирования многократно добавляют эталонный груз к массе дозируемого материала, формируют управляющие команды на исполнительную часть системы дозирования, пропорциональные величине и знаку сигнала рассогласования между заданным и текущим значениями массы дозируемого материала, для повышения точности измеряют косвенный сигнал, характеризующий производительность дозатора, например напряжение, подводимое к обмоткам электромагнитов вибрационного питателя, формируют на основе этого сигнала дополнительный сигнал о массе материала без эталонного груза, уточняют пересчетные коэффициенты зависимости между основным и дополнительными сигналами, прогнозируют сигнал о массе материала без эталонного груза при каждом добавлении этого груза. 5 з.п. ф-лы, 2 ил.

ko(t)=k(i) при t
t
где k(t) переменный коэффициент передачи, связывающий сигналы yi (t) и δyд(t);
t
γк настроечный параметр, введенный для уменьшения влияния помех оценивания δy(t) и δyд(t) на результат вычисления k(t), γк=0,1-2;
δy(t), δyд(t) траектории отклонений основного y(t) и дополнительного yд (t) сигналов от их базовых траекторий, рассчитанных на каждом цикле коррекции по значениям этих сигналов в моменты времени t
ζ промежуточная переменная интегрирования в пределах от t-t
t
где  прогнозируемое значение массы дозируемого материала без эталонного груза;
прогнозируемое значение массы дозируемого материала без эталонного груза;
t
y(t
k0(i) значение коэффициента передачи k(i) на i-м цикле коррекции;
δyд(t) траектория отклонения дополнительного сигнала о массе yд(t) от ее базовой траектории;
t текущее время.
где y(t
y(t) сигнал, принимающий на интервале времени между добавлениями эталонного груза непосредственно измеренные значения и на интервале времени добавления эталонного груза прогнозируемые значения основного сигнала о массе дозируемого материала, т.е.

где y(t
i промежуточная переменная суммирования, равна 1, 2, 3, i;
b(i) оценка чувствительности устройства измерения масс на i-м цикле коррекции; оценка чувствительности устройства измерения масс на i-м цикле коррекции, найденная в соответствии с выражением
оценка чувствительности устройства измерения масс на i-м цикле коррекции, найденная в соответствии с выражением
| Авторское свидетельство СССР N 1475311, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
