Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности.
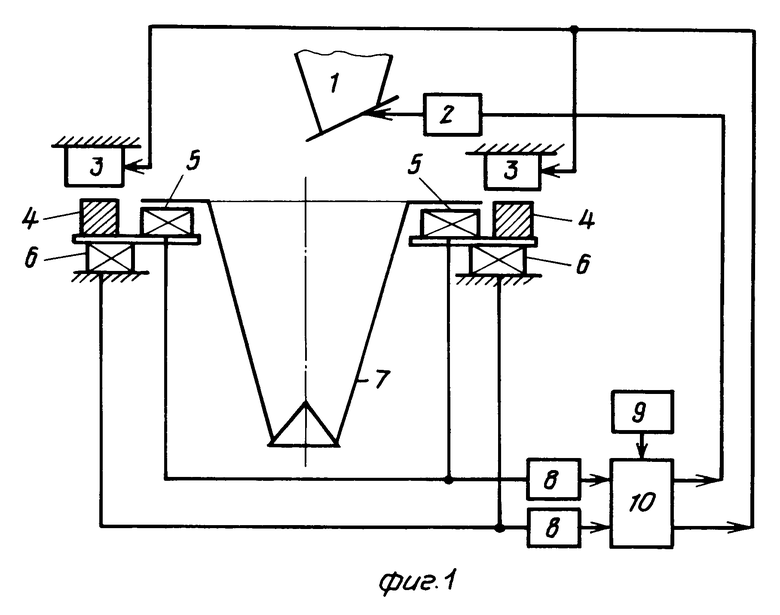
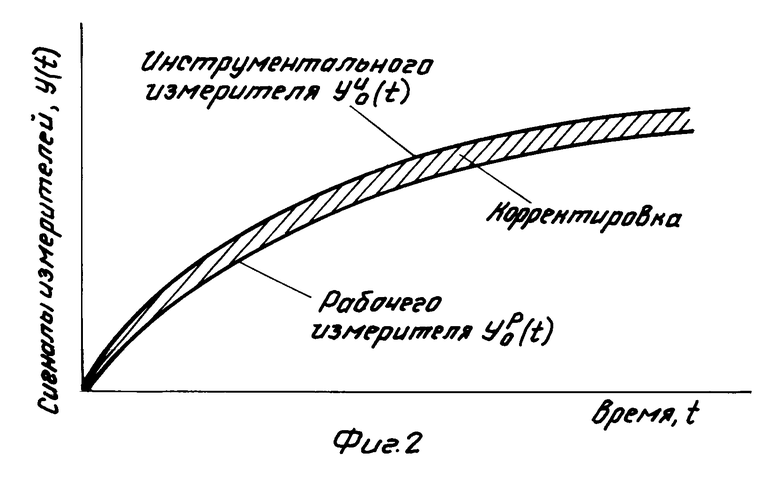
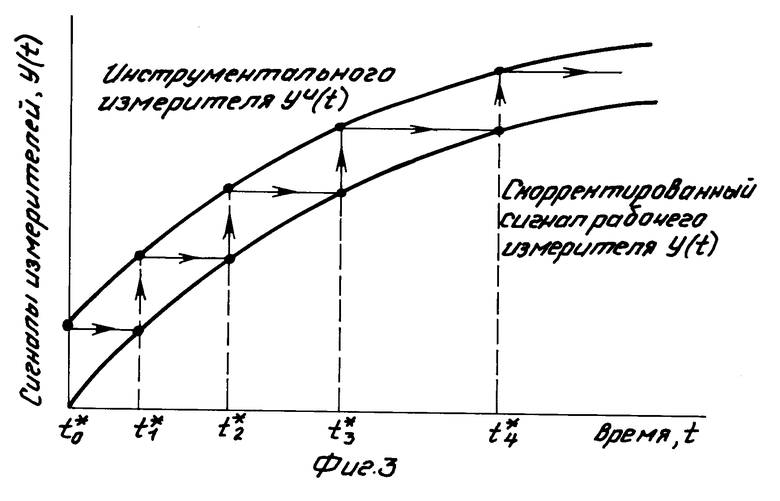
На фиг. 1 показана блок-схема устройства для реализации способа; на фиг. 2, 3 изображены графики сигналов, поясняющие работу устройства; на фиг. 2 - без эталонного груза; на фиг. 3 - при нагруженном эталонном грузе.
Способ весового порционного дозирования заключается в следующем.
К массе дозируемого материала добавляют эталонный груз, измеряют с помощью вспомогательного инструментального измерителя массу бункера с материалом и эталонным грузом, измеряют рабочим измерителем массу бункера с материалом, формируют команду на закрытие впускного затвора порционного дозатора в момент, когда масса материала в бункере достигает текущего значения меньше заданного значения порции материала на заданную величину, периодически через 10-20 циклов набора массы отключают на время набора одной порции материала эталонный груз и измеряют вспомогательным и рабочим измерителями массу бункера с материалом, находят величину корректировки сигнала рабочего измерителя как разницу между значениями сигналов рабочего и вспомогательного измерителей, корректируют в процессе наборов следующих порций материала сигнал рабочего измерителя на величину найденной корректировки, фиксируют момент времени t*, при котором значение скорректированного сигнала рабочего измерителя равно сигналу вспомогательного измерителя в предшествующий аналогичный момент времени, причем за начальный момент времени L = 0 принимают момент начала дозирования, непрерывно вычисляют текущее значение массы материала по выражению
Q(t) = Qэт(t
Qэт(t · [y(t)-y(t
· [y(t)-y(t
Qэт - масса эталонного груза;
t* - момент времени, при котором равны значения скорректированного сигнала рабочего измерителя и сигнала вспомогательного измерителя в предшествующие моменты времени;
y(t) - скорректированные значения сигнала рабочего измерителя в t-й момент времени;
L - число моментов времени t*, полученное к текущему моменту времени t при наборе одной порции материала;
l - вспомогательная переменная;
tL*, tL-1* - последний и предпоследний моменты времени t* при наборе одной порции материала.
Для измерения массы материала при его наборе с отключенным эталонным грузом запоминают значения сигнала вспомогательного измерителя в моменты времени t* при предшествующем наборе порции материала с добавленным эталонным грузом и используют эти запомненные значения сигнала вспомогательного (инструментального) измерителя для фиксирования моментов времени t* текущего набора порции материала без эталонного груза.
В момент t* начала дозирования, когда материала еще нет в грузоприемном бункере, сигнал вспомогательного измерителя yи(t0) соответствует массе эталонного груза Qэт, а сигнал рабочего измерителя yp(t0) - нулевой массе материала. При дозировании материала увеличиваются значения сигналов yp(t) и yи(t). В моменты времени t1*, когда текущее значение сигнала рабочего измерителя станет равным значению сигнала вспомогательного измерителя tи(t0) в момент начала дозирования, масса материала в грузоприемном бункере станет равной массе эталонного груза Qэт. То есть известно точное значение массы отдозированного материала. В момент времени t1* сигнал вспомогательного измерителя yи(t1) будет соответствовать массе эталонного груза Qэт и массе материала в грузоприемном бункере, то есть 2Qэт. При последующем дозировании фиксируют момент времени t2*, когда значение сигнала рабочего измерителя станет равным сигналу вспомогательного измерителя в момент времени t1*. В момент времени t1* в грузоприемном бункере масса материала времени t1* в грузоприемном бункере масса материала равна 2Qэт, а сигнал вспомогательного измерителя соответствует 3Qэт. Таким образом, в фиксиро- ванных точках tl* точно известна масса дозируемого материала. В промежутках между этими точками приращение масса дозируемого материала определяется по приращению сигнала рабочего измерителя и постоянно уточняемой зависимости, в частности коэффициента влияния этих приращений на приращение массы материала. Таким образом масса материала измеряется до последнего фиксированного момента времени t1*, а полная ошибка измерения определяется ошибкой измерения только на промежутках между соседними моментами времени t*. Приведенные рассуждения справедливы при идентичности рабочего и вспомогательного измерителей. Из-за того, что рабочий и вспомогательный измерители могут быть неидентичными, периодически через 10-20 наборов массы материала (циклов набора дозы) производят набор массы материала с отключенным эталонным грузом, определяют разницу между сигналами рабочего и вспомогательного измерителей и при последующих наборах порций корректируют сигнал рабочего измерителя на величину полученной разницы.
Устройство, реализующее предлагаемый способ (фиг. 1), содержит бункер 1, исполнительный блок 2, механизм 3 подъема эталонного груза 4, рабочие тензодатчики 5, вспомогательные (инструментальные) тензодатчики 6, грузоприемный бункер 7, измерительные блоки 8, задающий блок 9, вычислительное устройство 10. Грузоприемный бункер 7 установлен на рабочие тензодатчики 5, которые совместно с эталонным грузом 4 опираются на инструментальные тензодатчики 6. Тензодатчики соединены с измерительными блоками 8, которые подключены к вычислительному устройству 10.
Устройство, реализующее способ, работает следующим образом.
Высокая точность измерения массы материала обеспечивается при идентичности вспомогательного (инструментального) и рабочего измерений, включающих тензодатчики и измерительные блоки. Поскольку это условие на практике может не выполняться, то периодически через 10-20 наборов массы материала (циклов дозирования) в зависимости от нестационарности характеристики измерителей расчетным путем корректируют сигнал рабочего измерителя в зависимости от сигнала вспомогательного измерителя при отключенном эталонном грузе 4. Для этого с вычислительного устройства 10 дается команда механизму 3 на подъем эталонного груза 4 перед началом набора порции материала. В процессе набора материала этой порции определяется величина корректировки δy(t) рабочего измерителя как разница между значениями сигналов рабочего и вспомогательного измерителей (см. фиг. 2). Величины корректировки запоминают в вычислительном устройстве 10. При определении корректировки δy(t) выбирают набор массы материала, где заданная масса порции достаточно большая, для того, чтобы получить зависимость во всем диапазоне изменений сигналов вспомогательного и рабочего измерителей.
После определения корректировки δy(t) по команде с вычислительного устройства 10 механизм 3 опускает эталонный груз 4 и последующие наборы порций материала осуществляют уже с подключенным эталонным грузом 4. В момент начала дозирования t0* запоминают сигнал вспомогательного измерителя yи(t0*), который соответствует величине эталонного груза Qэт. В процессе набора массы материала корректируют сигнал рабочего измерителя yp(t), в результате получают скорректированный сигнал y(t) = =yp(t) - δy(t), где δy(t) - запомненный в вычислительном устройстве 10 сигнал корректировки. В момент времени t1*, когда значения скорректированного сигнала рабочего измерителя y(t1*) становятся равными значению сигнала инструментального измерителя в момент времени t0*, то есть tи(t0*), масса дозируемого материала в грузоприемном бункере 7 становится равной массе эталонного груза 4 (см. фиг. 3), а сигнал инструментального измерителя соответствует массе 2Qэт. Сигнал yи(t1*) в этот момент времени запоминается в вычислительном устройстве 10. Таким образом в процессе дозирования в точках t0*, t1*, t2*, . . . известны точные значения массы дозируемого материала. В промежутках между этими точками для определения полной массы материала рассчитывается ее приращение δQ после последнего момента времени tL* по следующему выражению:
δQ =  · [y(t)-y(t
· [y(t)-y(t
Тогда выражение для расчета полной массы Q(t) набранного в грузоприемный бункер материала будет иметь вид
Q(t) = Qэт(t
Qэт(t · [y(t)-y(t
· [y(t)-y(t
Текущее значение массы материала Q(t) сравнивают с заданным задающим блоком 9 значением порции материала Q* и формируют в вычислительном устройстве 10 команду на закрытие затвора бункера 1 дозируемого материала в момент выполнения равенства
Q* - Q(t) = δ*, где δ* - заданная величина массы материала на упреждение команды на закрытие затвора бункера 1. Сформированная команда реализуется исполнительным блоком 2.
Для того, чтобы осуществлять измерение массы материала в процессе его дозирования при отключенном эталонном грузе 4, запоминают в вычислительном устройстве 10 значения сигнала инструментального измерителя yи(tl*) в фиксированные моменты времени l на предшествующем наборе порции материала. Запомненные значения yи(tl*) используют на текущем наборе порции материала для определения моментов времени tl*.
Точность измерения массы материала во многом определяется величиной эталонного груза. Для увеличения точности измерения необходимо уменьшать величину эталонного груза, сообразуясь с быстродействием и памятью вычислительного устройства и характеристиками весоизмерителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ МАТЕРИАЛА ПРИ ДОЗИРОВАНИИ | 1989 |
|
SU1826711A1 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
| Устройство для дозирования компонентов шихты доменного процесса | 1980 |
|
SU935883A1 |
| Устройство для коррекции массы кокса | 1987 |
|
SU1468917A1 |
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| СПОСОБ ЭЛЕКТРОШЛАКОВОЙ НАПЛАВКИ | 1993 |
|
RU2069614C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ОПЕРАТОРА | 1990 |
|
RU2010340C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Весовой порционный дозатор | 1987 |
|
SU1432339A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность дозирования материалов. К массе материала добавляют эталонный груз, измеряют с помощью вспомогательного (инструментального) измерителя массу бункера с материалом и эталонным грузом, измеряют рабочим измерителем массу бункера с материалом, формируют команду на закрытие впускного затвора дозатора в момент, когда масса материала в бункере достигнет текущего значения меньше заданного значения порции материала на заданную величину, периодически через 10 - 20 циклов дозирования отключают на время набора одной порции материала эталонный груз и измеряют вспомогательным и рабочим измерителями массу бункера с материалом, определяют величину корректировки сигнала рабочего измерителя как разницу между значениями сигналов рабочего и вспомогательного измерителей, корректируют в процессе наборов следующих порций материала сигнал рабочего измерителя на величину найденной корректировки, массу материала определяют по расчетной формуле. 3 ил.
СПОСОБ ВЕСОВОГО ПОРЦИОННОГО ДОЗИРОВАНИЯ, заключающийся в том, что к массе дозируемого материала добавляют эталонный груз и измеряют вспомогательным измерителем суммарную массу бункера с материалом и эталонного груза, а рабочим измерителем измеряют массу бункера с материалом, формируют команду на закрытие впускного затвора дозатора в момент, когда масса материала достигнет текущего значения, которое меньше значения порции на заданную величину, отличающийся тем, что, с целью повышения точности, эталонный груз периодически отключают на время набора одной из порций материала и измеряют обоими измерителями массу бункера с материалом, определяют величину необходимой корректировки сигнала рабочего измерителя как разницу между значениями сигналов рабочего и вспомогательного измерителей, корректируют в процессе набора следующих порций сигнал рабочего измерителя на величину найденной корректировки, фиксируют момент времени, при котором значение скорректированного сигнала рабочего измерителя равно сигналу вспомогательного измерителя в предшествующий аналогичный момент времени, причем за начальный момент времени принимают момент начала дозирования, а текущее значение массы материала непрерывно вычисляют по формуле
где Q(t) - масса материала в t-й непрерывный момент времени;
Qэт - масса эталонного груза;
t* - момент времени, при котором равны значения скорректированного сигнала рабочего измерителя и сигнала вспомогательного измерителя в предшествующий аналогичный момент времени;
y(t) - скорректированные значения сигнала рабочего измерителя в 1-й момент времени;
L - число моментов времени t*, полученное к текущему моменту времени t, при наборе одной порции материала;
l - вспомогательная переменная; - последний и предпоследний моменты времени t* при наборе одной порции материала.
- последний и предпоследний моменты времени t* при наборе одной порции материала.
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ МАТЕРИАЛА ПРИ ДОЗИРОВАНИИ | 1989 |
|
SU1826711A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
