Изобретение относится к машиностроению, в частности к гидравлическим и пневматическим системам управления, которые могут найти применив в станкостроении, роботах, манипуляторах, захватах, питателях, конвейерах и т.д.
Цель изобретения - расширение диапазона регулирования.
Поставленная цель достигается тем, что в известном приводе, содержащем источник питания и выхлоп, цилиндр с поршнем, образующим рабочую полость, связанную с регулятором потока, стабилизирующим поток, сбрасываемый из рабочей полости, регулятор потока содержит, по меньшей мере, двухмембранный элемент, разделяющий корпус на три полости. При этом источник питания или сброс непосредственно подключен к средней полости, а через регулирующий дроссель - к полости управления с мембраной большей эффективной площади. Полость управления с меньшей эффективной площадью снабжена пружиной и соплом, подключенным к рабочей полости непосредственно или через емкость с жидкостью. В регуляторе пол ость управления с большей эффективной площадью дополнительно снабжена пружиной и соплом, подключенным к другой управляемой полости. Пружины установлены таким образом, что оба сопла в исходном состоянии открыты.
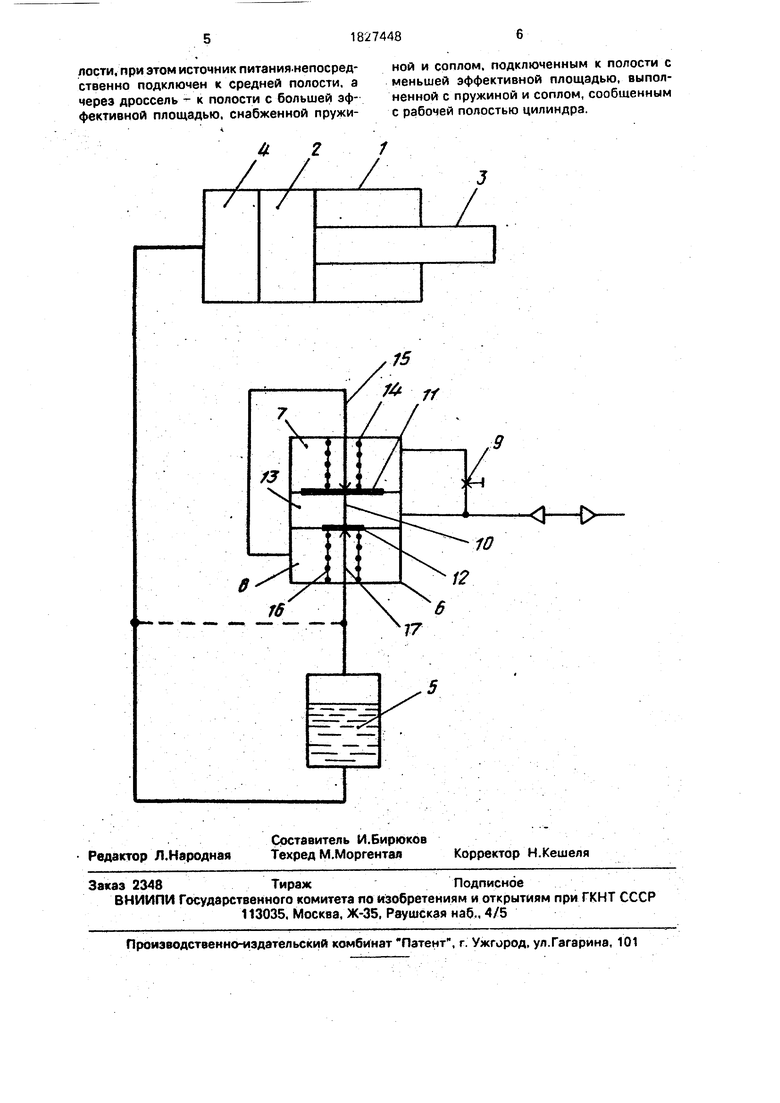
На чертеже приведена схема предлагаемого привода. Он состоит из цилиндра 1. поршня 2 со штоком 3. Штоковая полость связана с атмосферой или со сливом. Рабочая полость 4 через емкость 5, заполненную жидкостью или непосредственно связана с двумя последовательно установленными регуляторами потока 6, выполненными с полостями управления 7, 8 и регулируемым дросселем 9, вход регулятора 6 соединен с источником питания или сливом, а выход - с рабочей полостью 4 цилиндра 1. Регуляторы потока 6 выполнены в виде мембранного блока 10. например, с двумя мембранами большей эффективной площади 11 и меньщ
ъ
fe
00
Ю
ё
00
3 18274484
шей эффективной площади 12. Источник пи-дросселя 9 вакуум сформируется и в полости танйя непосредственно связан со средней7, а через открытое сопло 15 - и в полости 8. (полостью) 3 и через дроссель 9 с полостьюПо мере нарастания вакуума на мембран- управления 7, которая снабжена пружинойном блоке 10 будет формироваться равно- 14 и соплом 15, подключенным к управляю- 5весное состояние и пружина 16 начнет щей полости 8, снабженной пружиной 16 иприоткрывать сопло 17. 8 конечном итоге соплом 17, соединенным с рабочей поло-сформируется равновесное состояние, при стью 4 непосредственно или через емкостькотором через сопло 17 будет поступать 5 и жидкостью.столько воздуха, сколько его будет уходить Установка в регуляторе потока 6 допол- Ючерез дроссель 9. Под силовым воздействи- нительно пружины 14 и сопла 15, котороеем вакуума, жидкость из рабочей полости 4 соединено с полостью управления 8, позво-будет перемещаться в емкость 5 и перемелило сформировать два регулятора потока 6щать поршень 2 со штоком 3 влево. Таким в одном элементе. Это позволит упроститьобразом, осуществляется работа двух регу- конструкцию привода и как следствие, по- 15ляторов потока 6, выполненных на одном высить надежность работы. Пружины 14 иэлементе, содержащем мембранный блок 16 установлены таким образом, что мемб-из двух мембран. Аналогичным образом ранный блок 10 находится в среднем поло-можно сформировать регуляторы 6 и на жении и сопла 15 и 17 открыты.трехмембранных элементах. Если шток 3 Привод работает следующим образом. ,20направлен вверх и нагружен, то вместо ва- Сжатый воздух Рпитпоступает вглухуюкуума канал Рпит можно подключать к ат- камеру 13 регулятора потока 6. Мембранамосфере или к сливу, если регулятор 6 11 большей эффективной площади прогиба-работает на жидкости. ется вверх, перемещает мембранный блокЕсли канал питания Рпит подключить к 10 и закрывает сопло 15, сжимая пружину 25атмосфере, то регулятор 6 работает следую- 14, задавая на дросселе 9 перепад давле-щим образом.
кия. Через некоторое время в зависимостиПолость 13 сообщается с атмосферой, а
от проводимости дросселя 9 сжатый воздухт.к. сжатый воздух из полости 7 не может
поступает в полость управления 7 и сравни-при наличии дросселя 9 мгновенно выйти в
вает давление в полости 7 и 13. По мере 30атмосферу, то под силовым воздействием
приближения давления в полости 7 к давле-сжатого воздуха в полости 7 сопло 17 закронию в полости 13 пружина 14 будет переме-ется и пружина 16 сожмется. Через некотощать мембранный блок 10 вниз ирое время наступит равновесное состояние,
приоткрывать сопло 15. Сжатый воздух че-при котором через сопло 17 будет поступать
рез сопло 15 поступит в полость 8 и через 35столько воздуха, сколько его будет уходить
открытое сопло 16 в емкость 5 и начнетчерез дроссель 9 в атмосферу, а так как на
вытеснять жидкость из емкости 5 в рабочуюдросселе 9 поддерживается постоянный пеполость 4 цилиндра 1, перемещая с задан-репад давления, то это обеспечивает постоной скоростью поршень 2 со штоком 3 вира-янный расход воздуха, и как следствие,
во, т.к. на дросселе 9 поддерживается 40равномерное перемещение штока 3 с поршпостоянный перепад давления с помощьюнем 2.
пружины 14 и сопла 15, то это обеспечиваетТаким образом, за счет того, что двухпостоянный расход воздуха, поступающегомембранный элемент снабжен второй пру
в емкость 5 или непосредственно в рабочуюжиной и соплом, расположенным в одной
полость 4 и, как следствие, равномерное 45управляемой полости и соединенным с втоперемещение штока 3 вправо. Таким обра-рой управляемой полостью, удается сфорзом, осуществляется работа одного регуля-мировать на одном элементе два регулятора
тора потока.потока, что упрощает конструкцию привода,
В качестве второго регулятора потокаи как следствие, повышает надежность, используется тот же мембранный блок 10 и 50
дроссель 9. Но так как поток воздуха дви-Формула изобретения
жется в обратном направлении, за счет под-Привод, содержащий регулятор потока,
ключения Рпит в виде вакуума, то перепадсообщенный с одной стороны с источником
давления поддерживается пружиной 16 ипитания и выхлопом, а с другой - с рабочей
соплом 17. При подаче Рпит в виде вакуума 55полостью цилиндра, и дроссель, о т л и ч ав полости 13 формируется вакуум. Под сило-ю щ и и с я тем, что, с целью расширения
вым воздействием вакуума мембранныйдиапазона регулирования, регулятор вы
блок 10 перемещается вниз, сжимая пружи-полней в виде корпуса с установленным в
ну 16 и перекрывал сопло 17. Через некото-нем, по меньшей мере, двухмембранмым
рое время в зависимости от проводимостиэлементом,разделяющим корпус на три полости, при этом источник питания-непосред- ственно подключен к средней полости, а через дроссель - к полости с большей эффективной площадью, снабженной пружиной и соплом, подключенным к полости с меньшей эффективной площадью, выполненной с пружиной и соплом, сообщенным с рабочей полостью цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАДАТЧИК ДАВЛЕНИЯ КОНДИЦИОНЕРА МЕДИЦИНСКОЙ КИСЛОРОДНОЙ БАРОКАМЕРЫ | 1970 |
|
SU288435A1 |
| Кондиционер | 1981 |
|
SU964365A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЛОТНОСТИ | 2013 |
|
RU2534379C1 |
| Пневматический аналоговый усилитель | 1985 |
|
SU1355980A1 |
| Способ метрологической аттестации задатчика давления с нецилиндрическим поршнем | 1988 |
|
SU1737294A1 |
| Регулятор давления | 1977 |
|
SU744492A1 |
| Установка для определения термической стойкости веществ | 1985 |
|
SU1293566A1 |
| Устройство для приема пневматических дискретных сигналов | 1976 |
|
SU590803A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЛОТНОСТИ | 2014 |
|
RU2554294C1 |
| Преобразователь силового воздействия в пневматический сигнал | 1977 |
|
SU699362A1 |
Использование: в гидравлических и пневматических системах управления . Сущность изобретения: регулятор потока сооб2 щен с одной стороны с источником питания и выхлопом, с другой - с рабочей полостью цилиндра. Регулятор выполнен в виде корпуса с установленным в нем двухмембран- ным элементом, разделяющим корпус на три полости. Источник питания непосредственно подключен к средней полости, через дроссель - к полости с большей эффективной площадью, снабженной пружиной и соплом, подключенным к полости с меньшей эффективной площадью, выполненной с пружиной и соплом, сообщенным с рабочей полостью цилиндра. 1 ил.
4 21
/ /
| Гидропривод | 1987 |
|
SU1479717A2 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
