Изобретение относится к гироскопическим системам и может быть использовано, например, в высокоточных навигационных системах.
Целью изобретения является повышение точности системы аналитической выставки платформы.
На фиг.1 представлена структурная схема заявляемого устройства.
Устройство содержит платформу ТГС 1 с установленными на ней акселерометрами 2 и 3 и гироблоками 4,5,6,7, при этом выход первого акселерометра 2 соединей через первый усилитель 8 с датчиком момента первого гироблока 4, выход второго акселерометра 3 через второй усилитель 9
соединен со входом датчика момента второго гироблока 5 и через первый вход коммутатора 10 и третий усилитель 11 соединен со входом датчика момента третьего гироблока. Выход датчика угла четвертого гироблока 7 через усилитель обратной связи 12 соединен с датчиком момента этого гироблока и через аналого-цифровой преобразователь 13 соединен с регистром хранения величин токов обратной связи 14, выход которого подключен к первому входу блока вычислений параметров выставки 15, со вторым входом которого и с управляющим входом 2 регистра хранения величин токов обратной связи 14 соединен первый выход блока управления 16, второй выход которок
4 СЛ
го соединен с управляющим входом 3 ком-b - коэффициент демпфирования:
мутатора 10. на второй вход которого под-Кос - кинетический момент;
ключей источник стабильного тока 17.МВр - вредный момент, действующий
Для уяснения принципа работы систе-относительно оси прецессии; мы выведем уравнения аналитической вы- 5
ставки платформы ТГС, На фиг.2 показаноК0с КДу-Кус Кдм, (4) взаимное угловое положение осей координат OXnYnZn, связанных с платформой отно-КдУ,Кус,КДм - коэффициенты передачи сительно стартовой системы координатдатчика гула, усилителя, датчика момента О Јг/ Ј и осей Oxyz, связанных с азимуталь- 10азимутального гироблока. ным гироблоком., .. ..
На фиг.2 обозначены: од,, верти-Д™ установившегося движения а - 0 . / 0)
кальная и горизонтальная составляющие уг-При о СОПзг
ловой скорости вращения Земли;. к
А 15Ј--Ј+ / -t sin(A0+a)а, о , у- относительные угловые скоро-им1
сти вращения платформы;/,,, /, , I w
.- рбУг cos (АО +ш - -rruAjax
а-угол разворота платформы в азимуте; v J H
6 , у- углы невертикэльности платфор-х у sin (А0 + а) + Ь cos (А0 + а) +
мы: 20. „,
АО-начальный азимутальный угол плат-+ С0вр + (иа + #) б , (5) формы;
В- угол прецессии азимутального сиро-, М8р
блокагде (Уьр -гр-скорость дрейфа азимутальКинемэтические соотношения с учетом 25ного гироблока из-за вредных моментов. В
малости углов у, 6 в установившемся состо-качестве информации используем ток I в це, л i л. пи обратной связи азимутального гироблоянии(,у Н))пРи o-const:ка Проведя тригонометрические
преобразования, получим: о/хп ад cos (АО + а) + (и + у&) у. 30
а + «и - tar cos (Ао + а)у +к dt + { (sln а + Ki I cos а) cosA0
+ tWf sin (АО +а)5.(1)
„, . - (cosa - Ki f sin a) sin A0 - о) zn a sin (Ао 4- a) - (a 4- 0%) о . 35
- Кг cos a (y sin A0 + 6 cos A0) - где о) Xn . ft) УП , ш zn - проекции абсолютной угловой скорости вращения платформы;- s(n a (у cos Ao - д sin A0) +
у ,д -установившиеся значения углов.
невертикальности платформы. 40+ совр + (a + ofe) d (6)
С учетом того, что угол прецессиир мал,W
получим: t v .v .t/ к v, -
. , Кус Кдм.,
a + ft%-r/JrCos(Ao+a) 45К2 , Кз тД-, К4 (7)
КДМ Кос
+ sin (Ао +а)д ,
ty -о sin (Ao +a) +/Sftjr cos (Ao -fa) -Полагаем, что коэффициенты Ki, K2, Кз, К
/ . N mизвестны.
-(«+)« (2) 50пусть
X1 COSAo,
где (о х , to у- проекции абсолютной угловойX2 sln А0,
скорости на оси Ох, Оу азимутального гиро- ,. . . ...
бло;а vхз у slnA0+ д cosAo (8)
Уравнение моментов относительно осиХ4 у cosA0- б sfnA0 прецессии азимутального гироблока:
,ьЛ.„ я м .„ у , м ТогДа измеряя через время г токи обрат dt У р ( ной связи U- гДе Ч-З.-.б, получим систему
алгебраических уравнений для аналитичегде I - момент инерции гироблока;ской выставки платформы ТГС:
K4(±-l- lj+HJ K3{« slnO+1)a slnj a +Ki(lj+1cosQ+1) a -cosj a)xiG cosQ+1) « -cosj a -Ki(IJ+ + 1sin(j + 1)a -i|slnja x2-K2 cosG+l) a -cosj a jx3-K2 sin(J+1) a -sinj a x4,(9)
где .2.3.4. a a r,
a a + - ол.
d l-4+i-4 5 dtг -J
угловая скорость вынужденной вращения платформы;
ft - скорость дрейфа третьего гиробло
Решая систему (9) методом Крамера, чим:
CiС2СзС4 ,лгл
xi -Ј-,х2 -сЈ.хз -Ј-, Х4 -Ј- (10)
С - определитель системы:
Ci , С2 . Сз . С4 - определители Кра.
Подставляя Х1,х2,хз,х4 в (8), получим исе параметры выставки: С2 С1
Сг С
Ј. С
A0 arctg
или A0 arcsln или A0 arccos
(11) (12)
(/С2//СЗ/+/С1//С4)
1
(13)
(/С1/;сз/-/е2//С4)
Работа системы аналитической выставки заключается в следующем. Перед началом работы системы платформа горизонтируется, а азимутальный гироблок включается в режим датчика угловой скорости. По сигналу, поступающему, например, от внешней системы управления, блок управления выдает команду на управляющий вход коммутатора, который отключает датчик момента третьего гироблока от второго акселерометра и подключает его к источнику стабильного тока. С этого момента времени платформа начинает вращаться с угловой
скоростью а. а сам момент времени фиксируется как начало работы системы. Сигнал о токе обратной связи поступает на вход аналого-цифрового преобразователя и преобразуется в цифровую форму. По командам с блока управления через равные промежутки времени значения величин токов поступают в регистр хранения величин токов обратной связи и запоминаются. По окончании схема 6-ти значений токов блоком управления выдается сигнал на управляющий вход коммутатора, который отключает датчик момента третьего гироблока от источника стабильного тока и платформа останавливается. Одновременно
0 выдается сигнал в блок вычислений параметров выставки, где по вышеприведенным алгоритмам вычисляются параметры А0,
а, у.
Таким образом, после получения инфор- мации о шести значениях тока обратной связи определяется азимутальный угол АО. который представляет собой азимут платформы в момент начала работы системы. На момент окончания работы системы азимут
0
выставки платформы определяется
6 а
(14)
25 Технико-экономическим преимуществом предлагаемого технического решения является повышение точности аналитической выставки платформы. Это обуславливается тем, что алгоритмы выставки
30 учитывают погрешности гориэонтирования платформы, а также тем, что уменьшается нестабильность параметров системы вследствие малости углов вращения платформы.
35 Формула изобретения
Система аналитической выставки платформы трехосного гиростабилизатора с первым, вторым и третьим гироблоками содержащая установленные на платформе
40 первый и второй акселерометры, датчики момента первого, второго и третьего гиро- блоков, а также первый, второй и третий усилители, при этом выход первого акселерометра через первый усилитель соединен
45 сдатчиком момента первого гироблока, выход второго акселерометра через второй усилитель - с датчиком момента второго гироблока, а третий усилитель - с датчиком момента третьего гироблока. отличаю50 щ а я с я тем, что, с целью повышения точности аналитической выставки, в нее дополнительно введены четвертый гироблок, усилитель обратной связи, аналого-цифровой преобразователь, регистр хранения ве55 личин токов обратной связи, блок вычисления параметров выставки, блок управления, источник стабильного тока и коммутатор, при этом четвертый гироблок установлен на платформе осью прецессии по вертикали, датчик угла четвертого гироблока через усилитель обратной связи соединен с датчиком момента этого гироблока, выход усилителя обратной связи дополнительно соединен через аналого-цифровой преобразователь с регистром хранения величин токов обратной связи, выход которого соединен с первым входом блока вычисления параметров выставки, с вторым входом которого и с управляющим входом регистра
1
ШШЩ
1Л
шшш
т гг
хранения величин токов обратной соединен первый выход блока связи управления, выход второго акселерометра дополнительно соединен с первым входом коммутатора, второй вход которого соединен с выходом источника стабильного тока, управляющий вход коммутатора соединен с вторым выходом блока управления, а выход коммутатора - с входом третьего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС | 1994 |
|
RU2087864C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ИЗМЕНЯЮЩИМСЯ ТОКАМ КОРРЕКЦИИ | 2012 |
|
RU2509979C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2010 |
|
RU2428658C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
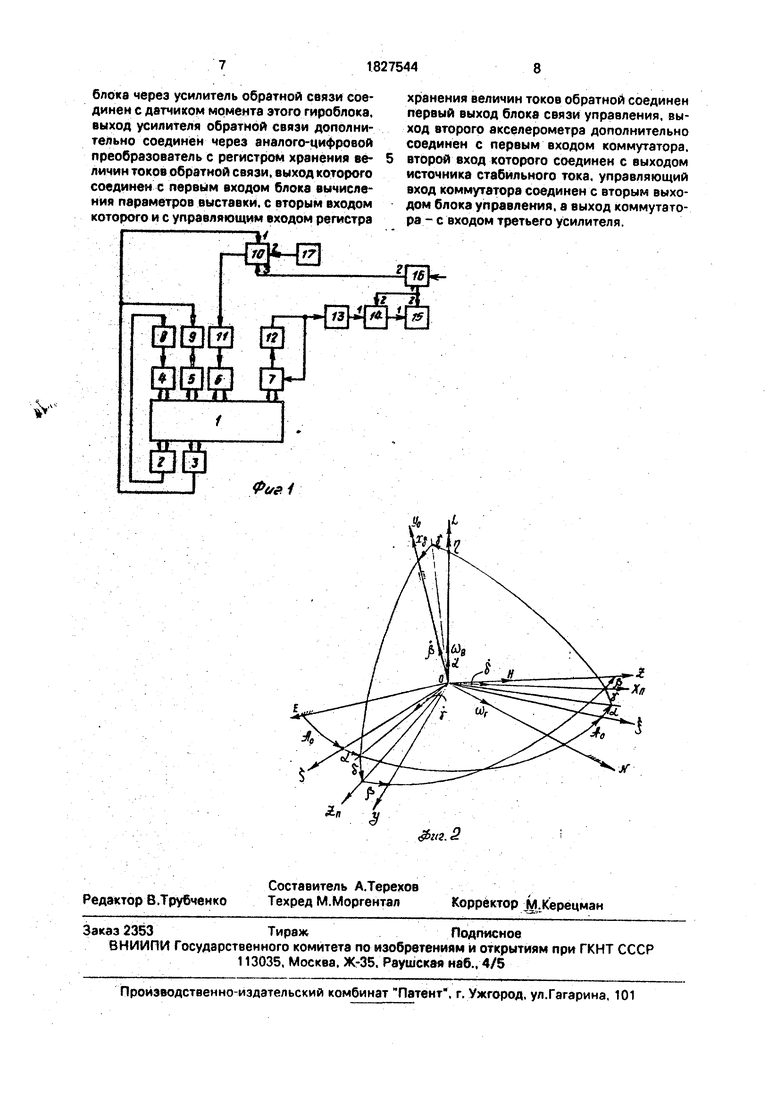
Изобретение относится к гироскопическим системам и может быть использовано, например, в наземных навигационных системах. Цель изобретения - повышение точности аналитической выставки платформы. Цель достигается учетом в системе погрешностей горизонтирования платформы и уменьшением нестабильности параметров системы в режиме выставки. На платформе 1 с расположенными на ней акселерометрами 2,3. гироблоками 5,6,4 и усилителями установлен азимутальный гироблок 7. Перед началом работы системы платформа 1 гори- зонтируется. а азимутальный гироблок 7 через усилитель обратной связи 12 включается в режим датчика угловой скорости. С помощью блока управления 16 и коммутатора 10 подключается источник стабильного тока 17 к датчику момента гиро- блока 3. Платформа начинает вращаться по азимуту с постоянной скоростью. С этого момента токи обратной связи преобразуются в цифровую форму в аналого-цифровом преобразователе 13 и запоминаются в регистре хранения величин токов обратной связи 14. По окончании работы системы выставки платформа останавливается, а информация о токах обратной связи подается в блок вычислений параметров выставки 15, где определяется азимут платформы и углы невертикальности. 2 ил. (Л С
Фе/.1
л
&кг.2
| Гироскопические системы, под ред | |||
| Д.С.Пельпора | |||
| ч.II | |||
| М.: Высшая школа, ,1983, с.354-371. |
