Изобретение относится к точному приборостроению и может быть использовано, например, для построения скважинных приборов (СП) непрерывных малогабаритных гироскопических инклинометров для обследования нефтяных, газовых и геофизических скважин, в том числе малого диаметра путем непрерывного движения СП в скважине.
Известен гироскопический инклинометр (А.С. 1788224 СССР МКИ Е21В 47/02. Инклинометр / Рогатых Н.П., Куклина Л.А. // БИ 1993, №2).
Для построения гироинерциального блока используются два идентичных (селективно подобранных по дрейфам) гирополукомпаса (ГПК), оси наружных рамок которых совпадают с продольной осью СП. Каждый ГПК состоит из наружных рамок, в которых установлены гироузлы (внутренние рамки с гиромоторами), по осям подвеса установлены датчики углов, которые измеряют углы поворота корпуса СП относительно стабилизированных в пространстве векторов кинетических моментов.
Горизонтальные коррекции ГПК состоят из жидкостных МЧЭ (обычно датчики жидкостные маятниковые типа ДЖМ-9Б) и коррекционных моторов. Так как в ГПК векторы кинетических моментов должны быть повернуты относительно базовых рисок корпуса на равные углы, то приборы должны иметь систему механического арретирования или электрического арретирования, которая, как указывают авторы Рогатых Н.П. и Куклина Л.А., на схеме условно не показана. Но введение систем механического арретирования значительно усложнит конструктивно и, вероятно, увеличит диаметр СП, а для системы электрического арретирования необходимо по осям подвеса гироузлов дополнительно устанавливать коррекционные моторы, что также увеличивает диаметр СП.
К известным техническим решениям можно отнести измерительный блок инклинометра (А.С. 1827541 СССР МКИ G01C 19/00. Измерительный блок инклинометра / Галкин В.И. и др. // БИ 1993, 26).
Измерительный блок инклинометра состоит из магнитного гироскопа типа ГМП-М, на шаровой поверхности ротора которого установлены двухкоординатные датчики углов и датчики моментов. Гироскоп ГМП-М с пассивным магнитным подвесом может работать в качестве двухкомпонентного измерителя угловой скорости.
Для этого сигналы датчиков углов, измеряющие углы отклонения ротора относительно корпуса в двух взаимно перпендикулярных плоскостях, через усилители с последовательно включенными масштабными резисторами, с которых снимаются сигналы пропорциональные угловым скоростям, подключают к соответствующим входам двухкоординатного датчика моментов.
Недостатки: магнитный гироскоп имеет сложную конструкцию, а сам инклинометр по идеологии построения является точечным.
Известен также инклинометр гироскопического типа (Патент РФ 2004786, МКИ Е21В 47/02. Инклинометр / Белянин Л.Н. и др.// Б.И. №45, от 15.12.1993).
В этой схеме гироинерциального модуля (ГИМ) рационально объединены два подхода: часть схемы является фрагментом бескарданной системы ориентации (БСО), содержащей двухкомпонентные акселерометр и датчик угловых скоростей (ДУС), жестко закрепленные на корпусе, с осями чувствительности перпендикулярными продольной оси СП, а вторая часть схемы - классическим трехстепенным гироскопом (ТСГ) с маятниковой горизонтальной коррекцией. При этом из метода на основе БСО заимствуется принцип начальной выставки, но уже для вектора кинетического момента ТСГ, сигнал курсового датчика угла которого используется для формирования азимута скважины, причем в зависимости от режима функционирования - выставка или работа - в ТСГ включается или выключается горизонтальная коррекция.
Недостатки: наличие ТСГ в кардановом подвесе, у которого при искривлении скважины рамки имеют тенденцию к совмещению, а также значительные габариты по диаметру СП. Кроме того, при движении в скважине имеется вращение СП вокруг продольной оси, что отрицательно сказывается на измерениях акселерометра и ДУС.
Известен также гироскопический инклинометр (Патент РФ №2030574, МКИ Е21В 47/02. Способ определения азимута скважины в последовательных точках и гироскопический инклинометр / Григорьев Н.И. и др. // Бюл. №7, 10.03.95), гироинерциальный модуль (ГИМ) которого построен на базе блоков акселерометров (измерителей ускорений) и датчиков угловых скоростей (измерителей угловых скоростей) на основе трехстепенных гироскопов, например, динамически настраиваемых гироскопов, которые жестко закреплены на корпусе скважинного прибора. При этом датчики угловых скоростей в процессе формирования измерительной информации устанавливают последовательно в два положения, отличающиеся друг от друга разворотом на 180° относительно оси, перпендикулярной к осям измерения угловых скоростей - продольной оси СП.
Указанные гироинерциальные модули обуславливают инклинометру следующие недостатки: инклинометр работает только в точечном режиме, что увеличивает время обследования скважин и приводит к снижению производительности инклинометрических работ, кроме того, такая схема гироинерциального модуля не позволяет создавать малогабаритные инклинометры.
В качестве прототипа выбрана классическая схема одноосного силового гиростабилизатора - ОСГС (Теория и конструкция гироскопических приборов и систем. Под. Ред. Д.т.н. Г.Д. Блюмина. Изд-во «Высшая школа». М. 1971. стр.360-361).
В данном прототипе гироинерциальный модуль представляет одноосный силовой гироскопический стабилизатор, на платформе (наружной раме) которого размещены полезная нагрузка и гироузел, с полуосями которого связаны датчик углов прецессии и датчик моментов и который своими полуосями установлен в платформе, полуоси которой установлены в корпусе гироинерциального модуля и с которыми соединены системный датчик угла (выходной датчик угла) и стабилизирующий мотор, вход которого подключен к выходу усилителя стабилизации, на вход которого подключен датчик углов прецессии.
Недостаток прототипа состоит в том, что он в заданной конструктивной компоновке не позволяет создать гироинерциальный модуль, обеспечивающий построение малогабаритного скважинного прибора непрерывного гироскопического инклинометра с заданными техническими характеристиками, одной из основных которых является диаметр СП.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в уменьшении габаритов по диаметру ГИМ и соответственно СП при сохранении непрерывности измерения.
Технический результат достигается тем, что в гироинерциальном модуле гироскопического инклинометра, содержащем одноосный силовой гироскопический стабилизатор, на платформе которого размещены полезная нагрузка и гироузел, с полуосями которого связаны датчик углов прецессии и датчик моментов и который своими полуосями установлен в платформе, полуоси которой установлены в корпусе гироинерциального модуля и с которыми соединены системный датчик угла и стабилизирующий мотор, вход которого подключен к выходу усилителя стабилизации, на вход которого подключен датчик углов прецессии, новым является то, что
гироузел представляет собой рамку, с n жестко установленными в ней гиромоторами, оси вращения которых параллельны, при этом датчик углов прецессии состоит из двух дифференциально включенных датчиков угла, роторы которых закреплены на рамке и размещены симметрично относительно полуосей подвеса гироузла, а статоры жестко закреплены на платформе,
датчик моментов состоит из двух датчиков силы, роторы которых закреплены на рамке и расположены симметрично относительно оси подвеса гироузла, а статоры расположены соответственно на платформе гироскопического стабилизатора,
стабилизирующий мотор представляет m последовательно соединенных двигателей, с осью одного из которых кинематически соединен тахогенератор,
кроме того, в гироинерциальный модуль введены задатчик команд и логическое устройство, управляющий вход которого соединен с выходом задатчика команд, а выходы системного датчика угла соединены через фазочувствительный выпрямитель с информационными входами логического устройства, первый выход которого подключен на первый вход усилителя стабилизации, а второй его выход подключен к статору датчика моментов, при этом на второй вход усилителя стабилизации подключен выход тахогенератора, а в цепь обмотки ротора одного из двигателей включен масштабный резистор, который по типу положительной обратной связи по току подключен на третий вход усилителя стабилизации, являющийся третьим входом суммирующего усилителя, коэффициент передачи по которому определяется соотношением

где N1 - коэффициент повышения статической точности и демпфирования относительно оси подвеса платформы; Rп, Rос - резисторы во входной цепи и цепи обратной связи; kR - отношение сопротивления масштабного резистора и активного сопротивления обмотки ротора двигателя, причем датчик углов прецессии подключен на четвертый вход усилителя стабилизации, который является входом усилителя-преобразователя, выход которого подключен к четвертому входу суммирующего усилителя,
при этом взаимное положение ротора относительно статора системного датчика угла и статора относительно корпуса выполнено с возможностью обеспечения внешней начальной азимутальной выставки платформы одноосного силового гироскопического стабилизатора гироскопического инклинометра.
Полезной нагрузкой являются два акселерометра, оси чувствительности которых взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы, или три акселерометра, оси чувствительности которых взаимно перпендикулярны между собой, а ось чувствительности третьего акселерометра параллельна оси подвеса платформы.
Сущность изобретения поясняется чертежом фиг.1, на котором представлена структурно-кинематическая схема прибора. На чертеже приняты следующие цифровые и буквенные обозначения:
1 - гиромоторы;
2 - рамка;
3 - платформа;
4.1 - роторы датчиков углов прецессии (ДУП);
4.2 - статоры ДУП;
5.1 - роторы датчиков силы (ДС);
5.2 - статоры ДС;
6.1, 6.2 - двигатели, которые образуют стабилизирующий мотор (СМ);
7.1, 7.2 - соединительные муфты;
8.1 - ротор системного датчика угла (ДУ);
8.2 - статор системного ДУ;
9.1, 9.2 - акселерометры (полезная нагрузка);
10 - тахогенератор;
11 - корпус СП;
12 - утяжелитель СП;
12.1 - направляющая поверхность утяжелителя;
13 - редуктор;
14.1, 14.2 - полуоси подвеса рамки (гироузла);
15.1, 15.2 - полуоси подвеса платформы;
15.3 - корпус гироинерциального модуля;
16 - фазочувствительный выпрямитель (ФЧВ);
17 - логическое устройство;
18 - задатчик команд;
19 - усилитель стабилизации;
20 - усилитель-преобразователь;
21 - операционный усилитель;
22 - суммирующий усилитель;
Н1, Н2 - кинетические моменты гиромоторов;
OY- ось подвеса платформы 3;
OZ - ось подвеса гироузла 2;
OX - ось, связанная с платформой и перпендикулярная осям OY и OZ;
Хa, Za - входные оси акселерометров;


F, Mдм - сила и момент, которые создают датчики силы;
Мсм - момент стабилизирующего мотора (суммарный момент двигателей 6.1 и 6.2);
Мв1, Мв2 - возмущающие моменты по осям подвеса платформы и гироузла;
Uсм - выходное напряжение усилителя стабилизации;
Iсм1 и Iсм2 - токи в обмотках роторов двигателей 6.1 и 6.2;
Us, Uс - напряжения синусной и косинусной обмоток системного датчика угла, на выходе ФЧВ;
U1, U2 - напряжения на выходе логического устройства;
Uк - напряжение задатчика команд;
Uyп, Uт, Uп, Uд - напряжения усилителя-преобразователя, тахогенератора, положительной обратной связи и датчика угла прецессии;
R1, Rд, Rт, Rп - входные резисторы суммирующего (операционного) усилителя;
Rос - резистор обратной связи суммирующего (операционного) усилителя;
Rm1 - масштабное сопротивление.
Гироинерциальный модуль гироскопического инклинометра содержит ОСГС, на платформе 3 которого размещена полезная нагрузка в виде двух акселерометров 9.1 и 9.2, оси чувствительности которых взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы, полуоси 15.1 и 15.2 которой установлены с помощью шарикоподшипников в корпусе 15.3 гироинерциального модуля, который показан условно, а не конструктивно. При установке корпуса ГИМ 15.3 в корпус СП 11 при сборке, необходимо корпус 15.3 так выставить, чтобы взаимное положение ротора 8.1 относительно статора 8.2 системного датчика угла, определяющее плоскость нулевого сигнала, и ось симметрии направляющей поверхности 12.1 утяжелителя 12 СП лежали в одной плоскости, что необходимо для определения начального азимута корпуса СП с помощью внешнего устройства определения начального азимута, в которое при выставке будет помещаться СП. Ротор 8.1 системного датчика угла, который измеряет угол поворота платформы относительно корпуса, и ротор двигателя 6.1 жестко соединены с полуосями платформы 15.1 и 15.2. В качестве стабилизирующего мотора используются, например, два двигателя 6.1 и 6.2, один из которых выполнен с двумя валами. Двигатели соединены последовательно и развиваемые ими моменты будут складываться. Валы двигателей 6.1 и 6.2 соединяются с помощью муфты 7.2. Вал двигателя 6.1 и полуось подвеса платформы 15.2 соединяются с помощью муфты 7.1. Данное решение предполагает использовать двигатели меньших габаритов, что позволяет габариты по диаметру перевести в габариты по длине. На платформе также установлен гироузел, содержащий, например, два гиромотора 1, жестко закрепленных на рамке 2. Суммарный кинетический момент складывается из кинетических моментов гиромоторов, что позволяет создать ГУ с достаточным кинетическим моментом, переводя при этом также габариты по диаметру в габариты по длине. Угол поворота ГУ относительно полуосей подвеса 14.1 и 14.2 (оси прецессии) измеряется двумя ДУП 4 индуктивного типа, сигнальные обмотки статоров 4.2 которых включены дифференциально, при этом роторы 4.1 установлены на рамке 2, а статоры 4.2 - на платформе 3. Сигнал, выдаваемый ДУП 4, поступает на четвертый вход усилителя стабилизации 19, а через усилитель-преобразователь 20 - на четвертый вход суммирующего усилителя 22, построенного на базе операционного усилителя 21. Датчик моментов (ДМ) 5 представляет собой два плунжерных датчика силы (ДС) магнитоэлектрического типа, каждый из которых состоит из ротора 5.1 и статора 5.2. Роторы 5.1 устанавливается на рамке 2 гироузла и представляет собой магнитопровод с установленным на нем постоянным магнитом. Статор 5.2 - рамка с двумя управляющими обмотками - устанавливается на платформе 3.
Датчики силы при подаче на их обмотки напряжения создают пару противоположно направленных сил 
Управляющие обмотки датчика моментов соединены со вторым выходом логического устройства 17, на управляющий вход которого подается сигнал команды Uк с задатчика команд 18, а к информационным входам подключены через фазочувствительный выпрямитель 16 выходы системного датчика угла 8 (Us - напряжение с синусной обмотки, Uc - напряжение с косинусной обмотки), которым, в частности, может быть синусно-косинусный трансформатор.
ДУП и ДС также как и гиромоторы расположены симметрично относительно оси Z подвеса рамки, что позволяет практически конструктивным решением добиться балансировки относительно оси Z.
Усилитель стабилизации 19 содержит в своем составе усилитель-преобразователь 20, который обеспечивает устойчивость и заданное качество работы ОСГС, и суммирующий усилитель 22, построенный на базе операционного усилителя 21, который имеет следующие коэффициенты передачи;




Первый-третий входы усилителя стабилизации 19 являются соответственно первым-третьим входами суммирующего усилителя 22, а четвертый вход - входом усилителя-преобразователя 20, выход которого подключен на четвертый вход суммирующего усилителя 22.
Для уменьшения габаритов по диаметру СП, кроме предложенных выше двух технических решений, в предлагаемом ГИМ ГИ начальная выставка предполагается внешней, что дополнительно уменьшает габариты по диаметру, но что приводит к незначительному изменению конструкции СП, которое состоит в том, что утяжелитель 12 (дополнительный груз, который присоединяют к СП при спуске в скважину) должен иметь направляющую поверхность 12.1, например, в виде отверстия произвольной формы, ось которой перпендикулярна продольной оси СП и имеет однозначное угловое положение с ротором 8.1 относительно статора 8.2 системного датчика углов. Например, будет совпадать с нулевым положением ротора относительно статора. Возможны другие варианты конфигурации направляющей, например, в виде клина.
Пояснение получения коэффициента передачи по каналу ПОС в суммирующем усилителе.
Рассмотрим формирование выходного напряжения усилителя стабилизации 19 и токов двигателей 6.1 и 6.2, которые создают управляющее моментное воздействие на платформу 3.
Уравнения движения ОСГС в режиме нормальной работы при идентичных параметрах двигателей, но сигнал ПОС снимается с одного двигателя, например, под номером 6.1, имеют вид





где (1) - уравнение относительно оси подвеса платформы 3 - оси Y;
(2) - уравнение относительно оси подвеса гироузла (рамки 2) - оси Z;
(3) - уравнение электрической цепи двигателя 6.1;
(4) - уравнение электрической цепи двигателя 6.2;
(5) - уравнение цепи усилителя стабилизации;
Куп - коэффициент передачи контура стабилизации от ДУП до входа суммирующего усилителя (СУ);
Кт - коэффициент передачи тахогенератора, который кинематически связан с осью стабилизации, например, через повышающий редуктор;
Rд, Rп, Rт, Rос, Rсм, Rm1 - резисторы во входных цепях СУ сигналов ДУП, ПОС, ТГ, а также в цепи обратной связи СУ, активное сопротивление якорей двигателей 6.1 и 6.2 и масштабный резистор в цепи якоря первого двигателя;
Mв1 - возмущающий момент в оси подвеса платформы 3;
Мв2 - возмущающий момент (дрейфа) в оси подвеса рамки 2;
Iсм1, Iсм2 - токи в обмотках роторов двигателей 6.1 и 6.2;
Сm - коэффициент момента двигателей 6.1 и 6.2;
Се - коэффициент противо-ЭДС двигателей 6.1 и 6.2.
Подставим (5) в уравнения (3) и (4)

 ;
;
 ;
;
 ,
,
где 
Отдельно преобразуем ток второго двигателя
и найдем сумму токов Iсм1+Iсм2, которая будет в конечном счете определять влияние ПОС в данном варианте. После проведения преобразований получим

где 
коэффициент влияния ПОС при двух идентичных двигателях, а ПОС организована по току двигателя 6.1, где

С физической точки зрения М можно трактовать как коэффициент повышения статической точности и демпфирования относительно оси подвеса платформы.
Найдем из (6) коэффициент передачи по ПОС суммирующего усилителя в функции параметров двигателей и N1, т.е.

который будем использовать при настройке суммирующего усилителя по входу ПОС.
Гиростабилизатор ГИМ может работать в трех режимах: «подготовка», «выставка» и «работа».
Режим «подготовка».
Предполагается, что к СП инклинометра присоединен каротажный кабель, и сам СП находится в подвешенном состоянии, практически готовым к спуску в скважину.
В этом режиме СП устанавливают во внешнее устройство для определения азимута (азимутальный модуль), которое предварительно закреплено в устье скважины и с помощью которого предварительно определен азимутальный угол установочной плоскости (физически, это фиксаторы, которые осуществляют жесткую привязку СП к корпусу азимутального модуля). Одновременно закрепляют СП в азимутальном модуле в вертикальном положении с помощью зажимов. Определенный азимут оси направляющей поверхности (установочной плоскости) перезаписывается в оперативную память вычислителя инклинометра - этот угол необходим для работы алгоритма ориентации ГИ, например, в соответствии с патентами №2100594 и №2159331.
Режим «выставка».
В этом режиме включают инклинометр и соответственно СП. Затем определяют систематическую составляющую дрейфа гиростабилизатора относительно оси стабилизации и приводят платформу 3 в согласованное с корпусом 11 СП положение.
Определение систематической составляющей дрейфа.
В этом подрежиме задатчик команд 18 формирует сигнал логической «I» и независимо от сигналов СКТ 8 выходные напряжения логического устройства 17 равны: U1=0, U2=0. При этом гиростабилизатор работает в рабочем режиме (должен прогреться заданное время) и напряжение, подаваемое на обмотки якорей двигателей 6.1 и 6.2 равно

В момент начала определения дрейфа запоминают напряжение системного датчика углов 8 и включают таймер. По истечению заданного времени Тз подсчитывают угловую скорость дрейфа ωдр по формуле

где Ψ1, Ψ2 - показания системного ДУ в начале и в конце подрежима,
и записывают его в память наземного вычислителя (принято, если ωдр>0, то она направлена по вертикали вверх).
Приведение платформы ГИМ в согласованное с корпусом СП положение.
В этом подрежиме при больших углах рассогласования осуществляют сначала грубое приведение, а затем точное согласование. При этом в обоих случаях используется сигналы синусной и косинусной обмоток СКТ, а исполнительным элементом в первом случае является стабилизирующий мотор (два двигателя 6.1 и 6.2), во втором случае - два датчика силы 5.
а) грубое приведение - электрическое арретирование.
С задатчика команд 18 подается сигнал логического «0» и выходные сигналы логического устройства 17 будут равны



Соответственно управляющие напряжения на СМ и ДМ будут равны

Uдм=0.
Чтобы могло выполняться электрическое арретирование, необходимо, чтобы параметры удовлетворяли условию
где βm - максимальный (до упора) угол поворота гироузла 2 (в пределах 1-2 градусов).
В грубом приведении возможны другие варианты управления: ДУП отключают от усилителя стабилизации, или по данному контуру уменьшают коэффициент передачи.
При этом за счет момента двигателей 6.1 и 6.2, обусловленного сигналом

гироузел сначала дойдет до упора, а потом этот момент развернет платформу 3 в положение нулевого сигнала СКТ (реально могут возникнуть колебания с амплитудой меньше αз). Для точного привидения платформы в нулевое положение автоматически начнется точное согласование.
При углах поворота платформы, близких к 180°, возможно преждевременное переключение на режим точного согласования. Кроме того, возможен вариант, когда угол α находится в зоне нечувствительности системного датчика угла. Чтобы избежать перечисленных проблем, в алгоритм введена проверка знака cos α. При таком алгоритме, если α близок к 180° (cos α<0) даже при 
б) точное согласование.
С задатчика команд 18 также подается сигнал логического «0» и выходные сигналы логического устройства 17 будут равны


При этом контур стабилизации будет функционировать как при определении дрейфа, т.е. в соответствии с законом управления (9), а доворот платформы будет осуществлять два датчика силы, создающие момент Мдм, по правилу прецессии, на которые подается напряжение (15).
В результате точного согласования платформа будет установлена в положение нуля системного датчика - СКТ. Следовательно, ее плоскость (или ось чувствительности одного из акселерометров, в соответствии с фиг.1 ось Za) совпадет по направлению с осью направляющей поверхности 12.1 (например, направляющего отверстия, как показано на фиг.1) утяжелителя 12. В таком положении платформа будет находиться до момента начала спуска СП в скважину.
Режим работа.
В этом режиме выполняются следующие операции:
- задатчик команд 18 подает на логическое устройство 17 сигнал логической «1», при этом его выходные сигналы обнуляются в соответствии с выражениями


Контур стабилизации продолжает функционировать в соответствии с выражением (9).
- освобождают СП от крепления в азимутальном модуле и начинают его спуск в скважину с помощью каротажного кабеля.
Выходными сигналами ГИМ являются: сигналы акселерометров, запомненный начальный азимут платформы, вычисленная систематическая составляющая дрейфа, и выходные сигналы СКТ.
Таким образом, предлагаемый ГИМ позволяет строить непрерывный ГИ с внешней азимутальной выставкой, алгоритм функционирования которого при спуске соответствует алгоритмам ГИ с одноосным индикаторным гиростабилизатором с автономной выставкой (патенты №2100594 и №2159331), СП которого имеет диаметр 73 мм. Однако автономная выставка имеет недостаток: с уменьшением диаметра СП уменьшается точность выставки в азимуте, что, в конечном счете, уменьшает точность построения траектории оси симметрии скважины. А так как внешнее устройство для выставки имеет потенциально более высокую точность, а диаметр СП в основном определяется диаметром гироскопических датчиков, то для точной передачи азимутального угла из внешнего устройства в вычислитель ГИ необходимо точно конструктивно выполнить, а при сочленении согласовать устройства сопряжения двух корпусов - внешнего устройства определения азимута и СП, что и отражено в предлагаемом изобретении.
На момент подачи заявки проработан эскиз конструкции ГИМ для варианта ГИ, СП которого имеет диаметр 42-45 мм.
Некоторые технические характеристики.
1. Гироузел состоит из двух синхронных гиромоторов, роторы которых выполнены из тяжелого сплава и имеют внешний диаметр 30 мм. Суммарный кинетический момент равен H=H1+Н2=2000 Гсмс.
2. Стабилизирующий мотор выполнен в виде двух двигателей постоянного тока ДПР-32 или ДПР-42, причем двигатель 6.1 с двумя валами. Двигатели между собой и с полуосью платформы соединяются с помощью безлюфтовых муфт.
3. Тахогенератор может соединяться с валом двигателя без редуктора 13 или с редуктором, как показано на фиг.1. Существуют двигатели постоянного тока со встроенным тахогенератором.
4. Акселерометры (измерители ускорений) - малогабаритные акселерометры AT-1104.
5. ДУП - два дифференциально включенных Ш-образных индуктивных датчика угла.
6. Датчик силы плунжерного типа по конструкции идентичен датчикам силы, которые применяются в гироскопе ГПА-20, входящем в состав гироплатформы ПГ-1 малогабаритной инерциальной навигационной системы МИС-45.
7. Параметры положительной обратной связи по току

В соответствии с (8) подсчитаем 
Из таблицы видно, с увеличением N1 градиент увеличения kп уменьшается. С другой стороны, при окончательном выборе соотношения необходимо учитывать формирование коэффициентов передачи по другим входам суммирующего усилителя. Моделирование динамики работы гиростабилизатора показало, что реально ограничиться N1=5-6. Например, при N1=5, задав Rп=5кОм, получим Rос=16кОм. При этом выбирать коэффициенты передачи по другим входам будем варьировать только резисторами входных цепей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
Изобретение относится к точному приборостроению и может быть использовано, например, для построения скважинных приборов. Гироинерциальный модуль содержит одноосный силовой гироскопический стабилизатор, на платформе (3) которого размещены два акселерометра (9.1, 9.2) и гироузел, представляющий собой рамку (2) с не менее двумя жестко установленными в ней гиромоторами (1), оси вращения которых параллельны. По оси подвеса платформы (3) установлены системный датчик угла (8) и стабилизирующий мотор, состоящий из не менее двух последовательно соединенных двигателей (6.1, 6.2). Применение не менее двух гиромоторов и не менее двух двигателей позволяет перевести габариты скважинного прибора по диаметру в габариты по длине, а взаимное положение ротора (8.1) относительно статора (8.2) системного датчика угла и статора относительно корпуса выполнено с возможностью обеспечения внешней начальной азимутальной выставки платформы одноосного силового гироскопического стабилизатора гироскопического инклинометра. 2 з.п. ф-лы, 1 ил.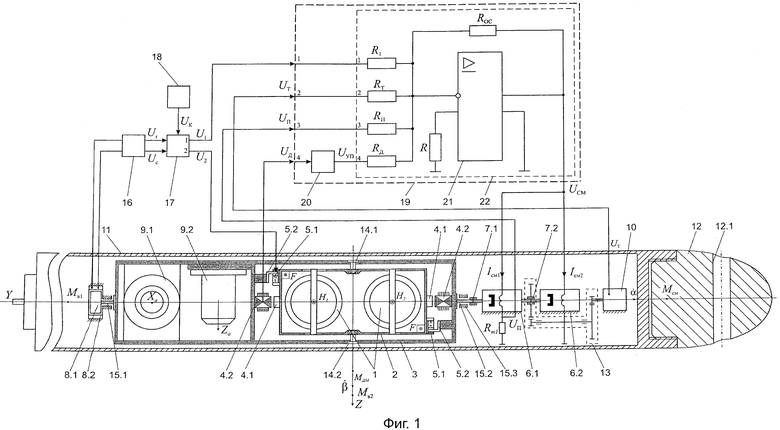
1. Гироинерциальный модуль гироскопического инклинометра, содержащий одноосный силовой гироскопический стабилизатор, на платформе которого размещены полезная нагрузка и гироузел, с полуосями которого связаны датчик углов прецессии и датчик моментов и который своими полуосями установлен в платформе, полуоси которой установлены в корпусе гироинерциального модуля и с которыми соединены системный датчик угла и стабилизирующий мотор, вход которого подключен к выходу усилителя стабилизации, на вход которого подключен датчик углов прецессии, отличающийся тем, что гироузел гироинерциального модуля представляет рамку, с n жестко установленными в ней гиромоторами, оси вращения которых параллельны, при этом датчик углов прецессии состоит из двух дифференциально включенных датчиков углов, роторы которых закреплены на рамке и размещены симметрично относительно полуосей подвеса гироузла, а статоры жестко закреплены на платформе,
датчик моментов состоит из двух датчиков силы, роторы которых закреплены на рамке и расположены симметрично относительно оси подвеса гироузла, а статоры расположены соответственно на платформе гироскопического стабилизатора,
стабилизирующий мотор представляет m последовательно соединенных двигателей, с осью одного из которых кинематически соединен тахогенератор, кроме того, в гироинерциальный модуль введены задатчик команд и логическое устройство, управляющий вход которого соединен с выходом задатчика команд, а выходы системного датчика угла соединены через фазочувствительный выпрямитель с информационными входами логического устройства, первый выход которого подключен на первый вход усилителя стабилизации, а второй его выход подключен к статору датчика моментов, при этом на второй вход усилителя стабилизации подключен выход тахогенератора, а в цепь обмотки ротора одного из двигателей включен масштабный резистор, который по типу положительной обратной связи по току подключен на третий вход усилителя стабилизации, являющийся третьим входом суммирующего усилителя, коэффициент передачи по которому определяется соотношением

где N1 - коэффициент повышения статической точности и демпфирования относительно оси подвеса платформы; Rп, Roc - резисторы во входной цепи и цепи обратной связи; kR - отношение сопротивления масштабного резистора и активного сопротивления обмотки ротора двигателя, при этом взаимное положение ротора относительно статора системного датчика угла и статора относительно корпуса выполнено с возможностью обеспечения внешней начальной азимутальной выставки платформы одноосного силового гироскопического стабилизатора гироскопического инклинометра.
2. Гироинерциальный модуль гироскопического инклинометра по п.1, отличающийся тем, что полезной нагрузкой являются два акселерометра, оси чувствительности которых взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы.
3. Гироинерциальный модуль гироскопического инклинометра по п.1, отличающийся тем, что полезной нагрузкой являются три акселерометра, оси чувствительности которых взаимно перпендикулярны между собой, а ось чувствительности третьего акселерометра параллельна оси подвеса платформы.
| RU 2004786 C1, 15.12.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Измерительный блок инклинометра | 1991 |
|
SU1827541A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| CN 201696030 U, 05.01.2011 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |

