Изобретение касается погрузочной станции для автоматической загрузки и разгрузки грузовых автомобилей или прицепов и контейнеров с пэлеттами с хвостовой стороны с помощью погрузочной машины без водителя, работающей по принципу вилочного подъемника, которая транспортирует палетты через, по меньшей мере, одну платформу, движущуюся вдоль погрузочной рампы.
Цель изобретения - расширение функциональных возможностей и повышение удобства в обслуживании.
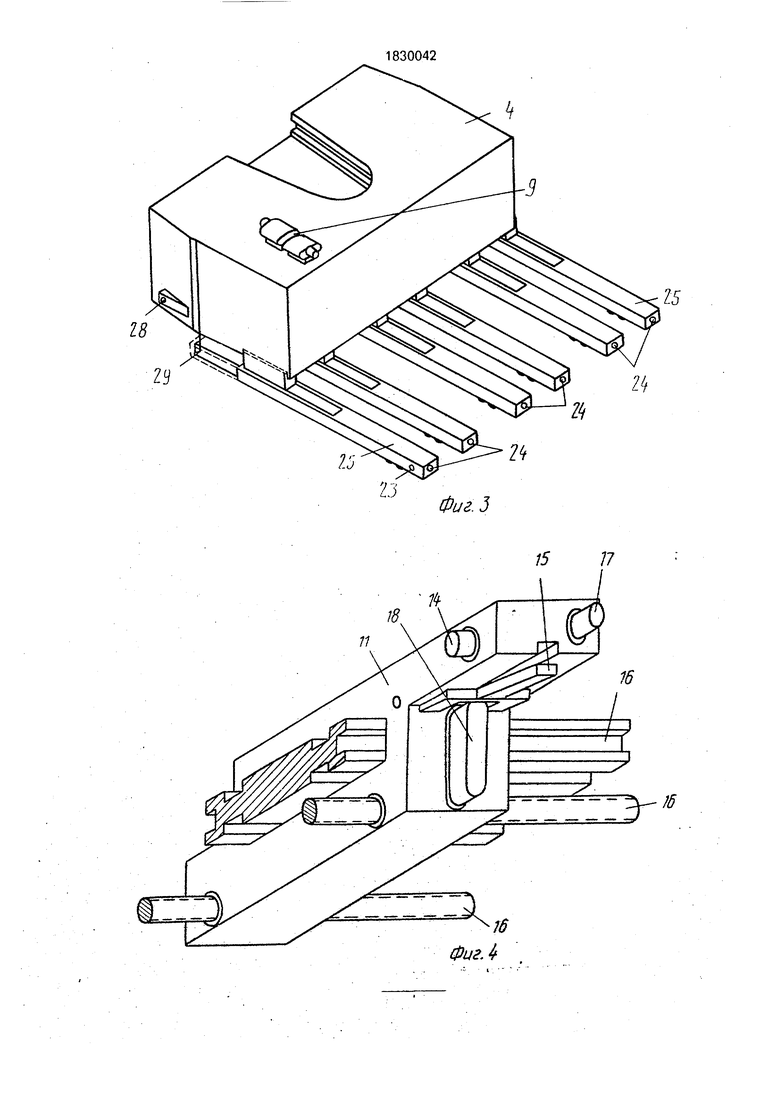
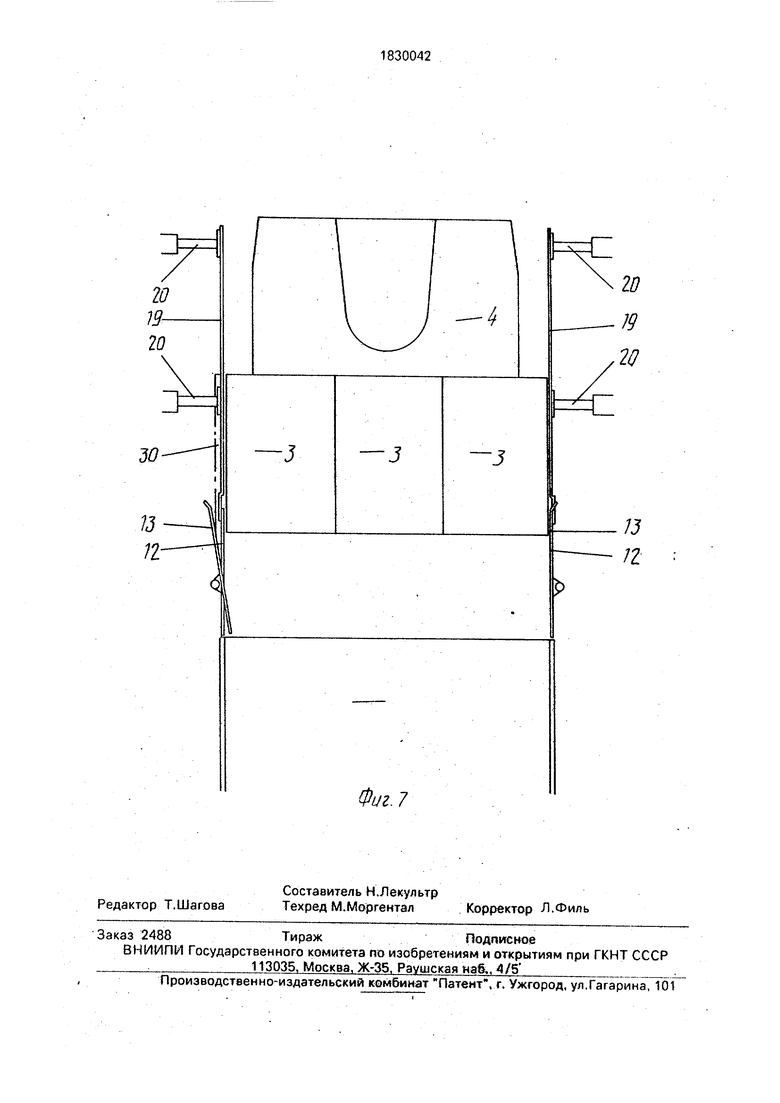
На фиг. 1 частично изображена погрузочная станция с головной рампой; на фиг. 2 - то же, с зубчатой рампой; на фиг. 3 - погрузочная машина; на фиг. 4 - увеличенное детальное изображение прижима, обозначенного на фиг. 1 и 2 позицией 5а; на фиг. 5 - вид сзади грузового автомобиля, нагруженного палеттами; на фиг. 6 - вид сзади грузового автомобиля с палеттами, поднятыми погрузочной машиной; на фиг. 7 - упрощенный вид сверху на область перехода между погрузочным пространством грузового автомобиля и погрузочной рампой.
Погрузочная станция для автоматической загрузки и разгрузки грузовых автомобилей 1 содержит транспортирующее средство 2 Для установки палетт 3 погрузочной машиной 4, установленной на платформе 5, смонтированной с возможностью перемещения до узла припарковки и подъемно-перемещающее устройство 7, с зажимной муфтой 8 для соединения с погрузочной машиной 4.
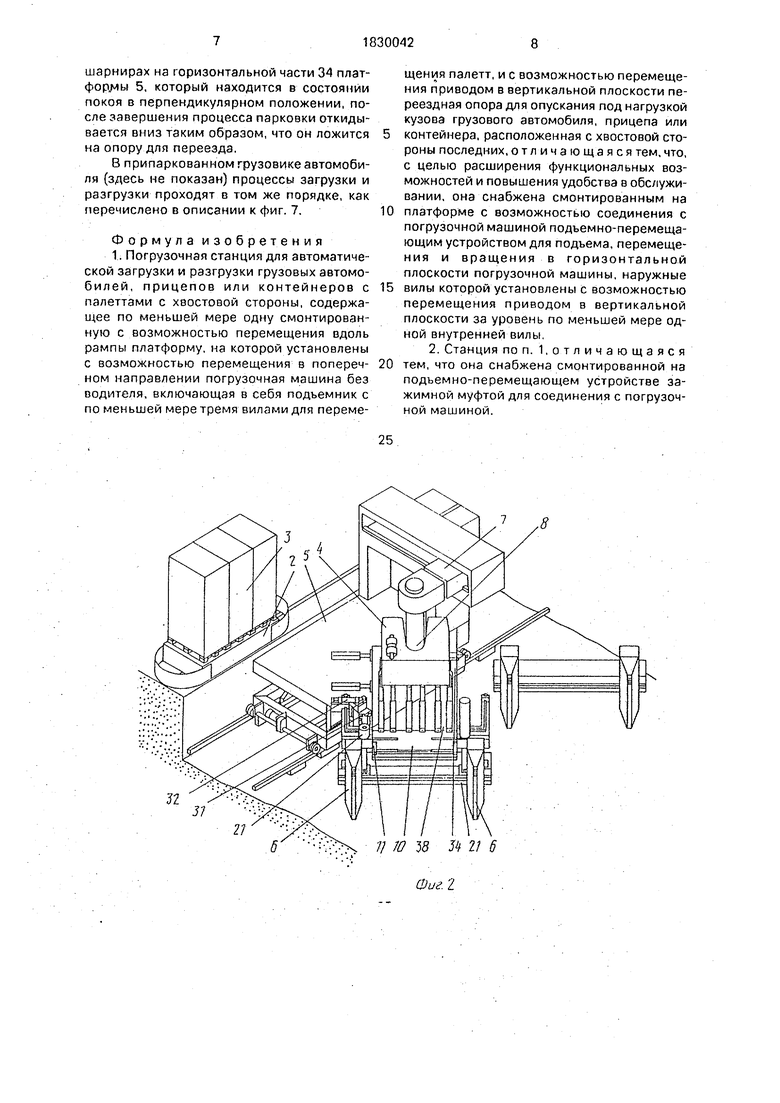
Фиг. 1 показывает грузовой автомобиль, подъехавший задней стороной к узлу припарковки 6, который занял свое положение с помощью не показанной здесь сигнальной установки. Мастер по погрузке или другое ответственное лицо задает управляющей вычислительной машине, к какому месту парковки должно подъехать погрузочное устройство и должен ли грузовой автомобиль загружаться или разгружаться, Погрузочное ,пространство грузового автомобиля при этом контролируется с помощью камеры 9, которая смонтирована на погрузочной машине 4 (см. фиг. 3).
При так называемой головной рампе,
как она показана на фиг; 1, погрузочное устройство движется на рельсах к узлу припарковки б и останавливается посередине между сигнальными устройствами, которые также определяют положение грузового автомобиля. Платформа 5 погрузочного устройства, которая имеет опору для переезда 10, движется в свою самую высокую позицию, при этом расположены на ней прижимы 11, служащие для опускания под
нагрузкой грузовой поверхности грузового автомобиля, занимают самую внутреннюю позицию, т.е. в середине опоры для переезда. Направляющие плоскости 12, выполняющие функции направления, и
ограничительные поверхности 13, выполняющие контрольные функции (см. фиг. 7), при этом откинуты. Платформа 5 медленно идет вниз до тех пор, пока датчик отраженного света (не показан) в опоре для переезда 10
не зарегистрирует хвостовую кромку грузового автомобиля. Опора для переезда 10 движется затем в направлении кромки хвостовой части грузовика, пока не срэбатыва- ет.кнопочный выключатель 14 в прижиме 11.
С помощью платформы 5 опора для переезда 10 опускается до тех пор, пока не будет приведен в действие кнопочный выключатель 15 R прижиме 11 при наезде на дно грузовика автомобиля. Прижимы 11, находящиеся посередине, теперь с помощью шпинделя с резьбой 16, синхронно двигаются по направляющему и удерживающему рельсу 17 наружу, пока не сработает кнопочный выключатель 18 на, по меньшей мере,
одном из прижимов 11. Чтобы можно было привести в действие кнопочный выключатель в прижиме 10 противоположной стороны на противоположной стенке грузового автомобиля, все погрузочное устройство
едет на рельсах в направлении другой стенки грузового автомобиля, при этом сработавший-до этого кнопочный выключатель 18 не изменяет своего положения у указанной
стенки грузовика, т.е. кнопочный выключатель 18 двигается навстречу направлению движения погрузочного устройства наружу. Когда сработают оба кнопочных выключателя 18, то погрузочное устройство останавли- вается. С помощью датчика пути (например, не представленный здесь линейный потенциометр) определяется над путем пробега прижима 11 ширина в свету грузовой поверхности грузового автомобиля 1. Благодаря нажатым кнопочным выключателям 14 левого и правого прижима 11 определяется положение угла опоры для переезда 10 относительно платформы 5 с помощью индуктивных датчиков пути (не показаны), со- ответственному этому углу и замеренной ширине в свету грузовой поверхности грузового автомобиля 1, направляющие плоскости 12 и 19 иограничительные плоскости 13с помощью устройства смещения 20 при- водятся в положение движения погрузочной машины 4.
В это же время кромка хвостовой части грузового автомобиля с помощью гидравлического цилиндра 21, который через при- жим 11 воздействует на кромку хвостовой части, опускается под нагрузкой, при этом устройство с удерживающей опорой 22 обеспечивает требуемую контропору.
Перед выравниванием направляющих плоскостей 12 и 19 погрузочная машина 4 с помощью устройства для подъема и перемещения 7 приподнимается и после выравни- вания опускается посередине, между направляющими плоскостями 19 в направлении движения к грузовому автомобилю. Погрузочная машина 4 отцепляется от зажимной муфты 8 устройства 7 и движется, направляемая устройством для бесконтакт- ного зондирования 23 боковых стенок грузовика и направляющими плоскостями 12 и 19, в пространство для погрузки грузового автомобиля. С помощью оптического или механического устройства 24 определяется положение палетты 3. так чтобы шипы 25 и 26 вилок погрузочной машины могли быть соответственно выровнены. Погрузочная машина 4 шипами 25 и 26 въезжает в палетты и так приподнимает их, что внешние ши- пы 25, которые,могут приподниматься по отношению к уровню внутренних шипов 26, при необходимости выравнивают по вертикали палетты 27, стоящие не перпендикулярно, так что они образуют блок, подпирающийся с противоположных сто- рои (ер. с фиг. 5 и 6). Величина/на которую могут быть приподняты внешние шипы 25 по сравнению с уровнем внутренних шипов 26, обозначена на фиг. 6 с помощью знака
X. При поднятии палетт они легко опрокидываются с помощью механического воздействия в сторону погрузочной машины.
С принятым грузом погрузочная машина едет обратно в направлении подъемно- прижимающего устройства, при этом она с помощью устройств 28 и 29 для бесконтактного зондирования боковых стенок грузовика и направляющих плоскостей 12 и 20 (см. фиг. 7)выводится из погрузочного пространства. Погрузочная машина 4 западает затем в зажимную муфту 8 устройства 7, приподнимается над уровнем направляющих плоскостей 12 и 20 и поворачивается. Во время процесса поворота погрузочная машина с помощью опрокидывающего устройства, размещенного в зажимной муфте 8, может удерживаться под острым углом, чтобы скомпенсировать усилия, которые воздействуют на груз, поднятый вместе с погрузочной машиной. Во время перечисленных выше процессов на погрузочной рампе соединительное транспортирующее средство 2. которое курсирует между складом и погрузочным устройством, приводится в позицию приема. Погрузочная машина, висящая на устройстве 7, со своим грузом поднимается во время поворота на уровень приема к соединительному транспортирующему средству 2. после чего там снимаются палетты 3. С помощью устройства 7 погрузочная машина возвращается обратно, пока шипы 25 и 26 не выйдут из палетт 3, после чего погрузочная машина 4 приводится в свое исходное положение, чтобы начать следующий процесс разгрузки.
Процесс погрузки после арретироеания грузовика и опускания под нагрузкой его плоскости погрузки следует соответственно в обратном порядке. В том случае, если груз выступает по бокам (обозначено штриховыми линиями 30 на фиг. 7), ограничительная плоскость 13, выполняющая контрольные функции, перемещается, что вызывает остановку погрузочной машины 4 и ее возвращение к исходной позиции с сигнализацией мастеру по погрузке.
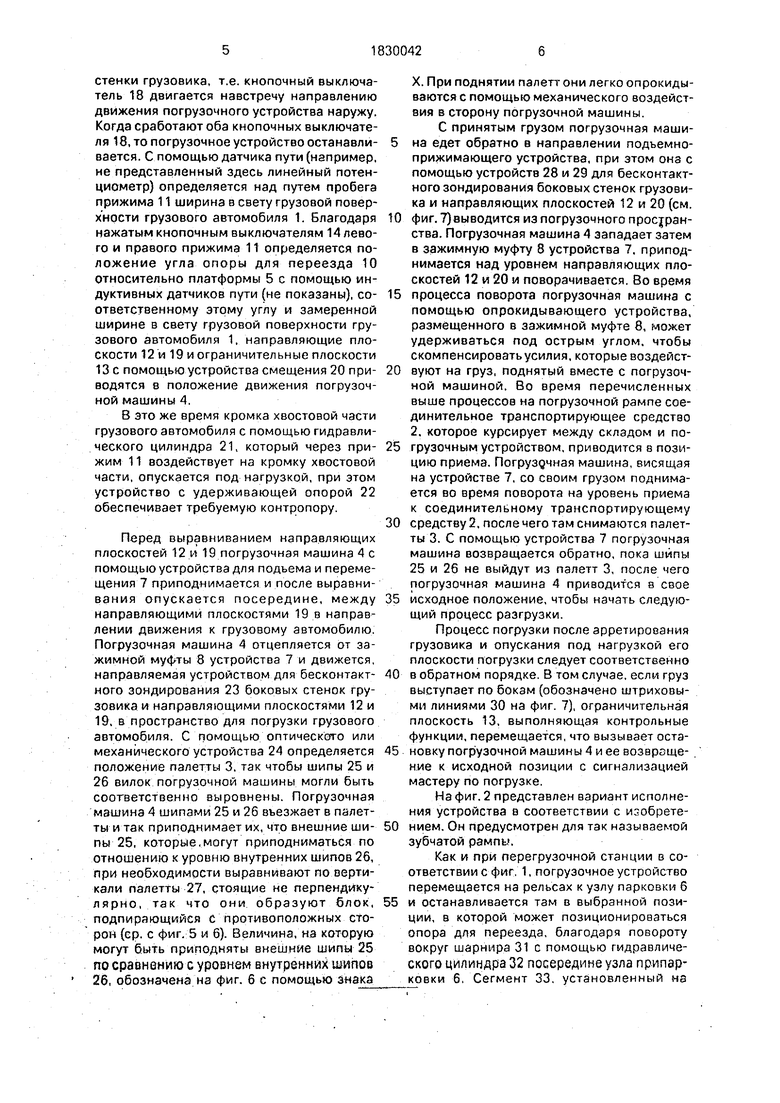
На фиг. 2 представлен вариант исполнения устройства в соответствии с изобретением. Он предусмотрен для так называемой зубчатой рампы.
Как и при перегрузочной станции в соответствии с фиг. 1, погрузочное устройство перемещается на рельсах к узлу парковки 6 и останавливается там в выбранной позиции, в которой может позиционироваться опора для переезда, благодаря повороту вокруг шарнира 31 с помощью гидравлического цилиндра 32 посередине узла припарковки 6, Сегмент 33. установленный на
шарнирах на горизонтальной части 34 плат- фор„мы 5, который находится в состоянии покоя D перпендикулярном положении, после завершения процесса парковки откидывается вниз таким образом, что он ложится на опору для переезда.
В припаркованном грузовике автомобиля (здесь не показан) процессы загрузки и разгрузки проходят в том же порядке, как перечислено в описании к фиг. 7.
Формула изобретения 1. Погрузочная станция для автоматической загрузки и разгрузки грузовых автомобилей, прицепов или контейнеров с палеттами с хвостовой стороны, содержащее по меньшей мере одну смонтированную с возможностью перемещения вдоль рампы платформу, на которой установлены с возможностью перемещения в поперечном направлении погрузочная машина без водителя, включающая в себя подъемник с по меньшей мере тремя вилами для переме0
5
0
щения палетт, и с возможностью перемещения приводом в вертикальной плоскости переездная опора для опускания под нагрузкой кузова грузового автомобиля, прицепа или контейнера, расположенная с хвостовой стороны последних, отличаю щ а я с я тем, что, с целью расширения функциональных возможностей и повышения удобства в обслуживании, она снабжена смонтированным на платформе с возможностью соединения с погрузочной машиной подъемно-перемещающим устройством для подъема, перемещения и вращения в горизонтальной плоскости погрузочной машины, наружные вилы которой установлены с возможностью перемещения приводом в вертикальной плоскости за уровень по меньшей мере одной внутренней вилы.
2. Станция по п. 1, о т л и ч а ю щ а я с я тем, что она снабжена смонтированной на подъемно-перемещающем устройстве зажимной муфтой для соединения с погрузочной машиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКЦИЯ УДЕРЖАНИЯ И ПОЗИЦИОНИРОВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО АВТОМОБИЛЯ, ПЕРЕВОЗИМОГО СОЧЛЕНЕННОЙ АВТОДОРОЖНОЙ СИСТЕМОЙ | 1999 |
|
RU2244638C2 |
| КОМПЛЕКС ДЛЯ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕВОЗОК С ПОВОРОТНОЙ ГРУЗОВОЙ ПЛАТФОРМОЙ. | 2013 |
|
RU2585675C2 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| ПОГРУЗОЧНАЯ ПЛАТФОРМА | 2009 |
|
RU2481261C2 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| ОТДЕЛЬНЫЙ УНИВЕРСАЛЬНЫЙ СЪЕМНЫЙ ГРУЗОВОЙ ПОДДОН ДЛЯ АВТОВОЗА | 2015 |
|
RU2700907C2 |
| АВТОВОЗ И АВТОПОЕЗД С ТАКИМ АВТОВОЗОМ | 2005 |
|
RU2350492C2 |
| Управляемый колесный погрузочно-разгрузочный комплекс для транспортных самолетов, оборудованных грузовой рампой, и способ погрузки-выгрузки крупногабаритных грузов в/из транспортных самолетов с использованием управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов | 2017 |
|
RU2660194C1 |
| Мостостроительная машина | 1960 |
|
SU133906A1 |
| Погрузочно-разгрузочное устройство транспортного средства | 1981 |
|
SU990560A1 |

Использование: для погрузочно-разгру- зочных работ. Сущность изобретения: в погрузочной станции для автоматической загрузки и разгрузки со стороны хвостовой части грузовых автомобилей 2, прицепов или контейнеров с палеттами 3 с помощью погрузочной машины 4. работающей по принципу вилочного погрузчика без водителя, которая транспортирует палетты 3 через по меньшей мере одну платформу 5, способную перемещаться вдоль погрузочной рам
JZ
J7
V
1 Ю 35 J4 11 6
24
4
U
Фиг. J
18
#
16
СГГГ--Э
JS
is
Фиг Л
(N
- О
со сэ
I,
О
4s
г
I.
20
19- 20
W
-J
п-Л
с
4
J
-J
