Изобретение относится к области автоматизации производства и может быть использовано, в частности, при создании робототехнических комплексов, манипулирующих с плоскими деталями или переме-- щающихся по вертикальным поверхностям.
Цель изобретения - повышение надежности захвата.
Для этого в устройство дополнительно введен кольцевой пневматический канал, выход которого расположен над упругой манжетой и соединен с зазором, в котором выше места их соединения размещены два кольцевых дросселя, пространство между которыми связано с объемом насадки, а паз на торцевой поверхности выполнен равномерным по высоте и удлиненным, центральное отверстие корпуса соединено с атмосферой, а дополнительный пневматический канал связан с источником сжатого воздуха.
Расположение дополнительного кольцевого пневматического канала обеспечивает равномерное уплотнение упругой
манжеты, а соединение его с. источником сжатого воздуха и предложенное выполнение паза позволяют создать зону взкууми- рования как в насадке, так и под пазом,
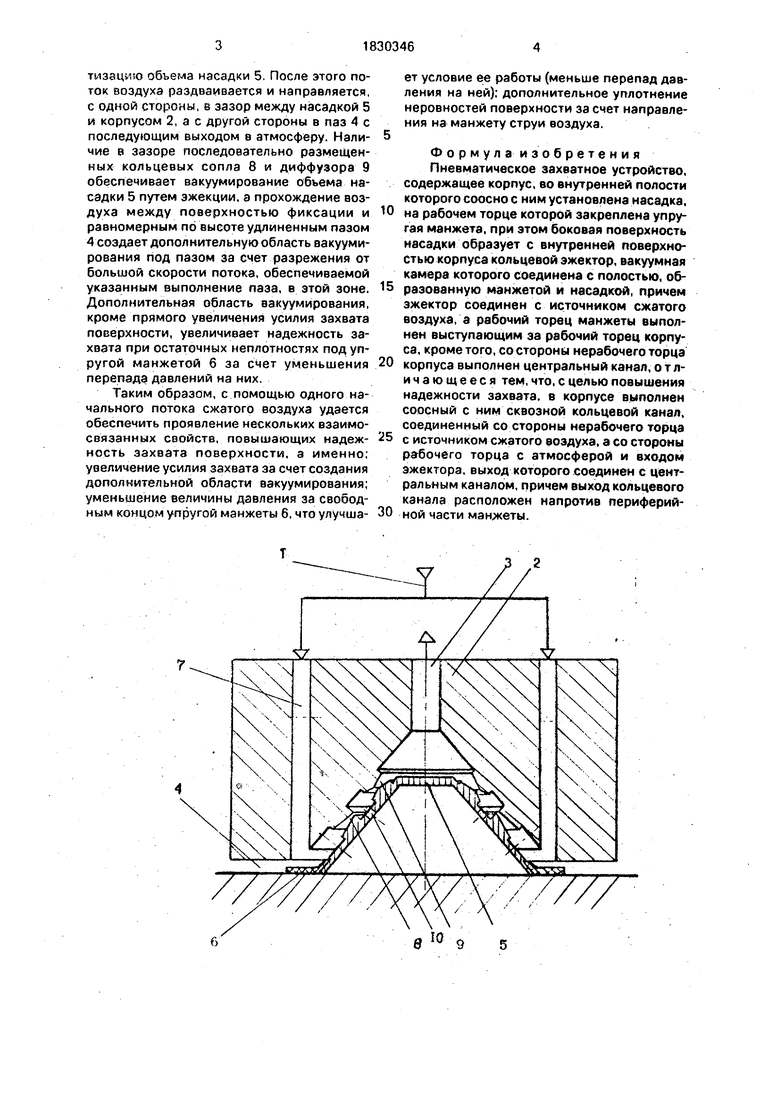
На чертеже приведена схема пневматического захватного устройства.
Устройство содержит источник сжатого воздуха 1, корпус 2 с центральным отверстием 3, на торцевой поверхности которого выполнен паз 4, насадку 5 с упругой манжетой 6, кольцевой пневматический канал 7 и кольцевые сопло 8 и диффузор 9. Пространство между соплом 8 и диффузором 9 связано с внутренним объемом насадки 5 отверстиями 10.
Устройство работает следующим образом, Поток сжатого воздуха от источника сжатого воздуха 1 подается в кольцевой пневматический канал 7 равномерно по его периметру. Сила реакции потока воздуха воздействует на упругую манжету 6, прогибая ее в сторону поверхности фиксации и тем самым уплотняя неровности поверхности при их наличии, что обеспечивает герме
fe
00
OJ
о
со
J
Os
тизацию объема насадки 5. После этого поток воздуха раздваивается и направляется, с одной стороны, в зазор между насадкой 5 и корпусом 2, а с другой стороны в паз 4 с последующим выходом в атмосферу. Наличие в зазоре последовательно размещенных кольцевых сопла 8 и диффузора 9 обеспечивает вакуумирование объема насадки 5 путем эжекции, а прохождение воздуха между поверхностью фиксации и равномерным по высоте удлиненным пазом 4 создает дополнительную область вакууми- рования под пазом за счет разрежения от большой скорости потока, обеспечиваемой указанным выполнение паза, в этой зоне. Дополнительная область вакуумирования, кроме прямого увеличения усилия захвата поверхности, увеличивает надежность за- хвзта при остаточных неплотностях под упругой манжетой б за счет уменьшения перепада давлений на них.
Таким образом, с помощью одного начального потока сжатого воздуха удается обеспечить проявление нескольких взаимосвязанных свойств, повышающих надежность захвата поверхности, а именно; увеличение усилия захвата за счет создания дополнительной области вакуумирования; уменьшение величины давления за свободным концом упругой манжеты 6, что улучша0
5
0
5
0
ет условие ее работы (меньше перепад давления на ней); дополнительное уплотнение неровностей поверхности за счет направления на манжету струи воздуха.
Формул аизобретения Пневматическое захватное устройство, содержащее корпус, во внутренней полости которого соосно с ним установлена насадка, на рабочем торце которой закреплена упругая манжета, при этом боковая поверхность насадки образует с внутренней поверхностью корпуса кольцевой эжектор, вакуумная камера которого соединена с полостью, образованную манжетой и насадкой, причем эжектор соединен с источником сжатого воздуха, а рабочий торец манжеты выполнен выступающим за рабочий торец корпуса, кроме того, со стороны нерабочего торца корпуса выполнен центральный канал, отличающееся тем, что, с целью повышения надежности захвата, в корпусе выполнен соосный с ним сквозной кольцевой канал, соединённый со стороны нерабочего торца с источником сжатого воздуха, а со стороны рабочего торца с атмосферой и входом эжектора, выход которого соединен с центральным каналом, причем выход кольцевого канала расположен напротив периферийной части манжеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ЭЖЕКТОР | 2014 |
|
RU2560969C2 |
| МЕЛКОДИСПЕРСНЫЙ ДОЖДЕВАТЕЛЬ-ОПРЫСКИВАТЕЛЬ | 2024 |
|
RU2827163C1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТЕЙ | 1994 |
|
RU2075962C1 |
| Вакуумный захват | 1988 |
|
SU1646859A1 |
| ВАКУУМНЫЙ ЭЖЕКТОР | 1992 |
|
RU2056546C1 |
| Пылесос | 1989 |
|
SU1708290A1 |
| НАСАДОК ДОЖДЕВАЛЬНОГО АГРЕГАТА | 2006 |
|
RU2313405C1 |
| ПНЕВМАТИЧЕСКАЯ ШЛИФОВАЛЬНАЯ МАШИНА | 1996 |
|
RU2128569C1 |
Использование: при создании робото- техимческих комплексов, манипулирующих с плоскими деталями или перемещающихся по вертикальным поверхностям. Сущность изобретения: в корпусе выполнен кольцевой пневматический канал, выход которого расположен над упругой манжетой и соединен с атмосферой и входом кольцевого эжектора, вакуумная камера которого соединена с полостью, образованной манжетой с корпусом. Центральный канал корпуса соединен с атмосферой и выходом эжектора, а кольцевой канал связан с источником сжатого воздуха. 1 ил.
| Автоматический вакуумный захват | 1979 |
|
SU831705A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
