Изобретение относится к фототопографическому производству и может найти применение при автоматическом получении цифровых моделей рельефа по стереоизображениям местности, представленных аналоговой или цифровой формах.
Целью изобретения является повышение точности автоматической съемки рельефа по стереоизображениям местности.
Сущность предлагаемого способа заключается в определении значений оптических плотностей в соответственных точках локальных однотонных участков стереоизображений местности, нахождении соотношений между этими ЗОП и распределения этих соотношений по площади стереоизображений, с использованием которого при определении критериев сходства корректируют значения оптических плотностей вдоль базисных линий одного из стереоизображений.
Предложенный способ автоматической съемки рельефа по стереоизображениям местности, представленных в аналоговой форме в виде фотоснимков, может быть ре00СО О ч
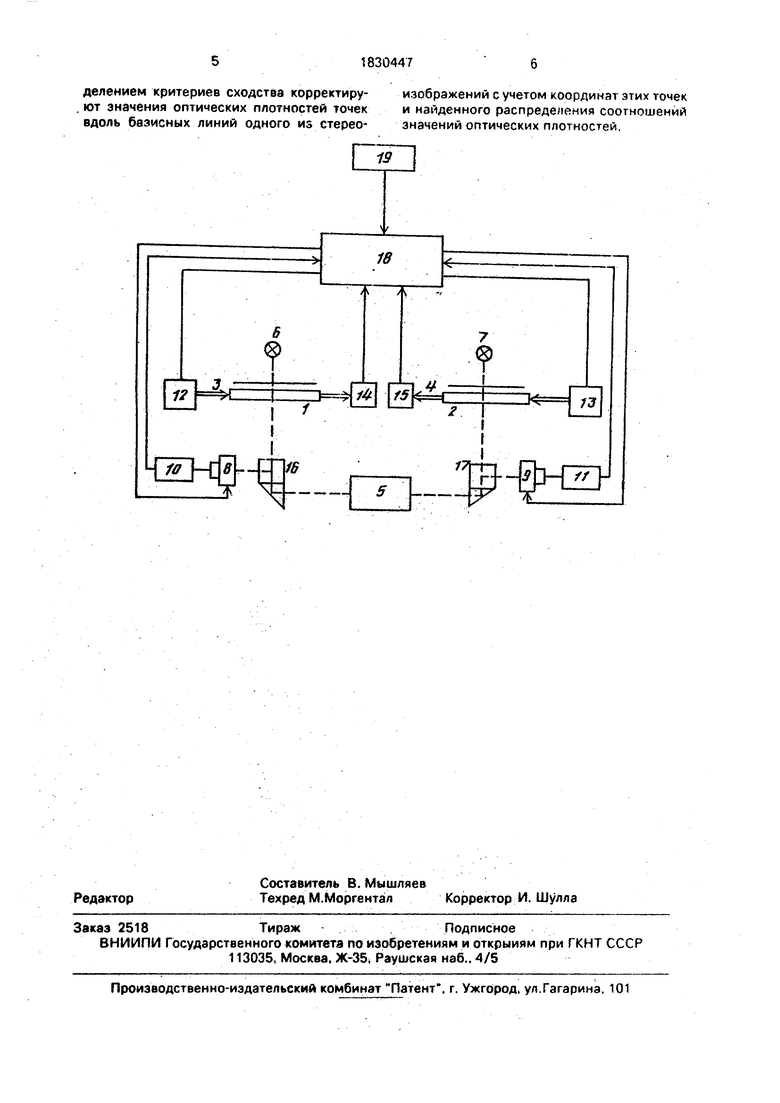
ализован на устройстве, блок-схема которого представлена на чертеже.
Оно включает: каретки 1 и 2 с фотоснимками 3 и 4, составляющими стереопару, оп-с тическую наблюдательную систему 5, осветители 6 и 7, сканаторы 8 и 9, аналого- цифровые преобразователи 10 и 11, сервоприводы 12,13, измерители координат 14,15, призмы 16, 17, вычитательный блок 18 и органы управления 19. Причем оптическая наблюдательная система 5 оптически через призмы 16, 17 и фотоснимки 3, 4 связана с осветителями 6 и 7, а вычислительный блок
18связан электрически по входу с аналого- цифровыми преобразователями 10 и И, измерителями координат 14, 15 и органами управления 19, а по выходу - с сервоприводами 12,13 и сканаторами 8, 9.
Реализуется преложенный способ на данном устройстве следующим образом.
Световые потоки осветителей 6 и 7, про- модулированные изображениями фотоснимков 3 и 4 через призмы 16, 17, поступают как на сканаторы 8, 9, так и в оптическую наблюдательную систему 5, с помощью которой осуществляют визуализацию изображений местности, для их стереоскопического рассмотрения.
Выполняют построение модели местности, для чего с помощью органов управления 19 в вычислительный блок 18 подают электрические сигналы, на основании которых последний вырабатывает управляющие воздействия, передаваемые на сервоприводы 12, 13 для перемещения кареток 1 и 2 с фотоснимками 3 и 4 в требуемые точки, С помощью измерителей координат 14,15 определяют координаты не менее 5 соответственных точек, по которым находят элементы взаимного ориентирования фотоснимков для построения модели местности.
Далее с помощью органов управления
19перемещают фотоснимки 3 и 4 таким образом, чтобы под сканаторами 8 и 9 находились соответственные точки локальных однотонных участков фотоснимков. Вычис лительный блок 18 через аналого-цифровые преобразователи 10 и 11 считывает в этих местах фотоснимков ЗОП и запоминает их. После того, как измерены значения оптических плотностей в ряде соответственных точек локальных однотонных участков (желательно равномерно в пределах всей обрабатываемой площади стереопары), вычислительный блок 18 находит соотношения между ЗОП и определяет, например, по способу наименьших квадратов коэффициенты АО, At. Аараспределения этих соотношений, например, вида:
F(XM, YM) АО + А1Хм + A2YM + АзХм YM + . где Хм, YM - координаты точек модели местности.
Затем с помощью сканаторов 8, 9 осу- ществляют сканирование фотоснимков вдоль базисных линий, в результате чего получают ЗОП для левого и правого фото- Снимков.
С использованием распределения соотношений ЗОП в вычислительном блоке 18
определяют скорректированные ЗОП D (Хм,
YM) для одного из фотоснимков, например,
по формуле
D(XM, YM).- 0(Х„, YM) F(XM, YM).
где D(XM, YM) - ЗОП, полученные вдоль базисных линий на другом фотоснимке.
По скорректированным ЗОП вычислительный блок 18 однозначно без подстройки определяет критерии сходства, находит соответственные точки и определяет их координаты и высоты вдоль каждой базисной линии и запоминает их.
Вышеописанным образом производится определение координат и высот соответственных точек вдоль всех базисных линий. . Использование данного способа позволит:
- повысить точность автоматической съемки рельефа местности по стереоизображениям;
-сокра/ить затраты времени на выполнение автоматической сьемки рельефа;
- снизить требования быстродействия к вычислительному блоку и объему его оперативной памяти.
Формула изобретения Способ автоматической съемки рельефа
местности по ее стереоизображениям, включающий формирование модели местности, получение значений оптических плотностей вдоль базисных линий, определение критериев сходства, нахождение соответственных точек с учетом этих критериев и определение их координат и высот вдоль каждой базисной линии, о тли- и ч а ющ и и с я тем, что, с целью повышения точности, перед получением значений оптических плотностей вдоль базисных линий выбирают на стереоизображениях несколько локальных однотонных участков, на каждом из которых определяют значения оптических плотностей и их соотношения в
соответственных точках с одновременным определением координат эти точек, с учетом которых находят распределение соотношений значений оптических плотностей по площади стереоизображений, а перед определением критериев сходства корректируют значения оптических плотностей точек вдоль базисных линий одного из стереоизображений с учетом координат этих точек и найденного распределения соотношений Значений оптических плотностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ РЕЛЬЕФА | 2004 |
|
RU2255357C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ РЕЛЬЕФА | 2004 |
|
RU2253089C1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ автоматического создания цифровой модели местности по стереоснимкам | 1991 |
|
SU1793226A1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ СТВОЛОВОЙ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВОЗДУШНОЙ БЕСПИЛОТНОЙ СЪЕМКИ | 2021 |
|
RU2773144C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА МЕСТНОСТИ | 1995 |
|
RU2101677C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИЗГОТОВЛЕНИЯ ЦИФРОВЫХ ПЛАНОВ И КАРТ | 2007 |
|
RU2371768C2 |
Использование: в фотограмметрии, при автоматическом получении цифровых моделей рельефа по стереоизображениям местности. Сущность изображения: формируют модель местности. Выбирают на стереоизображениях несколько локальных однотипных участков, на каждом из которых определяют значения оптических плотностей и их соотношения в соответственных ггочках с одновременным определением координат этих точек, с учетом которых находят распределение соотношений значений оптических плотностей по площади стереоизображений. Получают значения оптических плотностей вдоль базисных линий. Корректируют значения оптических плотностей точек вдоль базисных линий одного из стереоизображений с учетом координат этих точек и найденного распределения соотношений значений оптических плотностей. Определяют критерии -сходства, находят соответственно точки с учетом этих критериев и определяют их координаты и высоты вдоль каждой базисной линии. 1 ил. LO
4
I
15
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пособие по фотограмметрии | |||
| Сокращенный перевод под ред.В.И.Кораблева, М.: Недра, 1971, с.31-34 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гимельфарб Г.Л., Крот В.М | |||
| Автоматическое восстановление рельефа местности по стереопаре снимков с учетом неравномерных фотометрических искажений сигнала по площади снимка | |||
| Вопросы теории роботов и искусственного интеллекта | |||
| Киев, ИК АН УГ.Г.Р 1ЙЯО | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
