Изобретение относится к технике авто. матического регулирования и может быть
использовано для регулирования процесса
порционного дозирования на предприятиях
пищевой и химической промышленности.
Целью изобретения является повышение производительности дозирования,
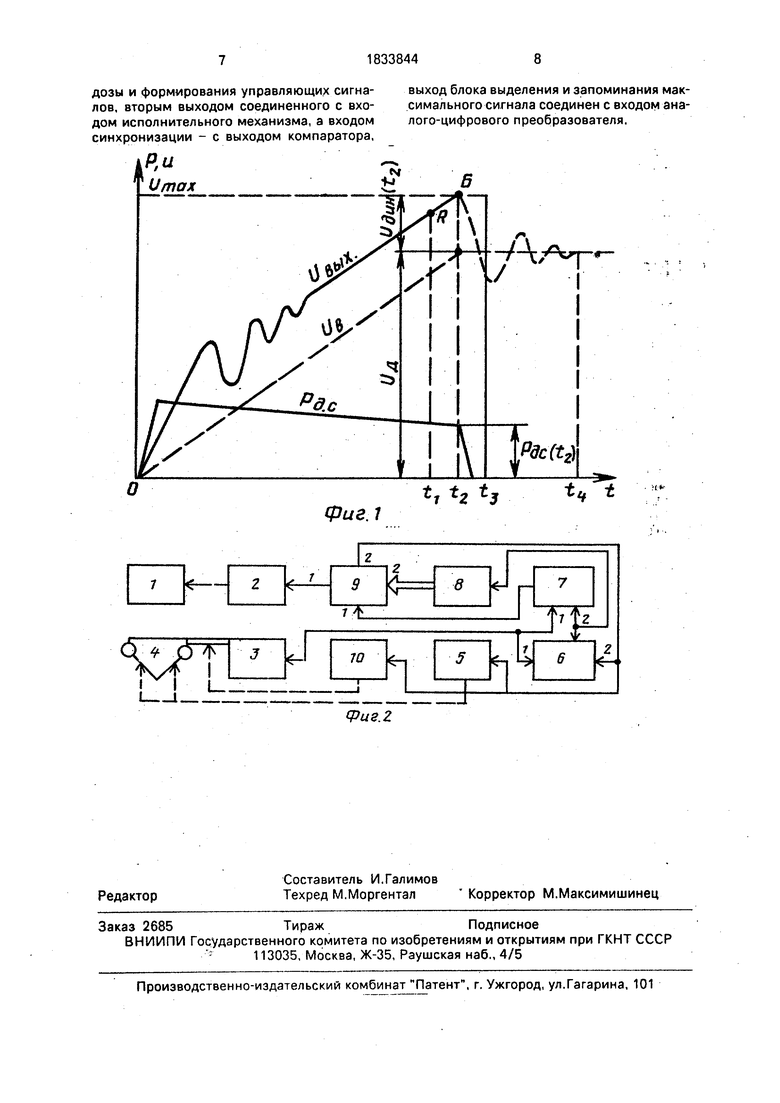
На фиг. 1 представлены графики, поясняющие работу устройства; на фиг. 2 - блок- схема предлагаемого устройства.
Устройство содержит дозатор 1, исполнительный механизм 2, весоизмерительный узел 3, грузоприемный бункер 4, узел управления створками 5, блок выделения и запоминания максимального сигнала (БВЗ) 6, компаратор 7, аналого-цифровой преобразователь (АЦП)8, блок расчета коррекции дозы и формирования управляющих сигна- лрв (БРФ)9 и демпфер 10.
Устройство работает следующим образом.
Формируемая по объему дозатором 1 доза материала поступает в грузоприемный бункер 4, установленный с помощью призматических опор на упругом элементе, например, консольного типа весоизмерительного узла 3. При этом количество N импульсов, поступивших на вход исполнительного механизма 2 с первого выхода БР.Ф 9 задает угол р поворота шнека дозатора 1, а следовательно объем дозы Уд, а частота f - угловую скорость совращения шнека, а следовательно скорость перемещения частиц материала на выходе дозатора, или их начальную скорость VH. Поскольку р N Ощ где Ош - шаговый угол двигателя (рад.) Уд Vi п, где Vi - объем одного витка шнека; п - число оборотов шнека, п р/2 п, a Vi . я/A (D2 - d2) (H - (5), где D. - наружный диаметр шнека, d - диаметр вала шнека, Н - шаг шнека, д - толщи- на пера шнека, то с учетом данных зависимостей можно записать:
Чц 1(02-(12)()аш
N
Очевидно, что вес дозы Рд у Уд, где у- удельный вес материала, Так как производительность II есть производная по времени от Рд, то
П K3y(D2-d2)()aUJf (2) о
где к3 - коэффициент заполнения шнека.
Начальную скорость материала можно определить по формуле:
VH 1/2 тгКсОш Hf (3) где кс - коэффициент проскальзывания.
Подставив выражения (2), (3) в формулу для определения динамической силы Рд.с. можно записать:
Рдс 1/8 AKay(D2-d2)()au,fx
х 2g h + (1/2 тг)2 (кс Ош Н f)2(4)
5 где Я - коэффициент, учитывающий свойства материала.
Из выражения (4) следует, что Рд.с. является функцией двух перемещениях: частоты f импульсов управления и высоты h падения
10 материала. Блок БРФ, формирующий сигнал управления, располагает фактическим значением частоты, которая в общем случае может меняться по заданному для обеспечения точного позиционирования шнека и
15 может использовать ее для определения фактического значения Рд.с. Что касается переменной h, то поскольку масса дозы определяется после того как доза попадает в бункер (момент времени t2 на фиг. 1), то
20 значение h будет иметь постоянное значение h h(t2). Частота f, определяющая начальную скорость частиц материала, будет также иметь определенное значение, соответствующее моменту времени t отключе25 ния дозатора, f f(ti). Интервал времени от ti до t2 есть время падения столба материала, находящегося в полете, в бункер.
Таким образом, подставив значения h(t2) n f(ti) в формулу (4), получим значение
30 Рд-с. (2). Так как суммарное усилие, воздействующее на бункер складывается из веса дозы и динамической силы, то и сигнал Увых. (фиг. 1) на выходе весоизмерительного устройства 3 включает в себя две компоненты:
35 сигнал UB, пропорциональный постепенно нарастающему за время 0-t2, а следовательно не вызывающему переходных процессов весу материала в бункере равного в момент t2 значению 1)д, соответствующего
40 Рд и сигнал ид.с. (на фиг. 1 не показан), вызванный скачкообразно меняющейся силой Рд.с. Переходные процессы возникают от резкого увеличения (в начале засыпки) и от резкого (в момент t2) уменьшения Рд.с.
45 Так как к моменту т.2 колебательный процесс, вызванный падением дозы в бункер затухает, то справедливы следующие выражения:
Deux (t2) Uflbixmax Umax,
50UBblx (t2) ид + ид.с. (t2)
Следовательно Кд Umax - ид.с. (t2), но так как ид.с.(2) КРд.с. (t2), где К - коэффициент передачи весоизмерительного устройства в установленном режиме, то окончательно за55 пишем:
ид Umax - КРд.с. (te) Запишем формулу (4) в виде:
(5)
Рдс (t2) Af VB + С f2
(6)
гдеА AK3y(D2-d2)(H-(5)auj; . о
1
о2 Н2
B 2gh(t2);C -Kt 4л2
Вычисление значений Рдс по формуле (6), Уд по формуле (5) и сравнение ид с сигналом, соответствующим номинальной дозе производится в БРФ. Umax определяется и кратковременно хранится в БВЗ 6, который фиксирует максимальное из всех значений, Umax поступающих на его вход с выхода весоизмерительного устройства 3. Сигнал с выхода БВЗ поступает на один из входов сравнения компаратора 7, на другой вход которого поступает текущее значение сигнала. Очевидно, что при равномерном увеличении сигнала, значения сигнала на обоих входах одинаковы. Для исключения ложных срабатываний компаратора от всплесков иВых., вызванных первым переходным процессом компаратор заблокирован до момента времени ti, т. е. на все время работы дозатора. В момент tr БРФ 9 по значению частоты f(ti) рассчитывает Рдс (т.2). Именно такое значение будет иметь Рдс от воздействия на бункер материала в момент t2, т. к. только через промежуток времени 2 - ti материал, вылетев из сопла дозатора достигнет поверхности материала в бункере, при этом высота падения равна h(t2). Начиная с т,2 Рдс скачкообразно уменьшается практически до нуля, в результате ивых уменьшается и начинается второй переходный процесс. При этом нарушается паритет сигналов на входах 1,2 сравнения компаратора, т, к. БВЗ сохраняет значение Uebix(t2) Umax и на выходе компаратора формируется импульс, поступающий на вход 1 БРФ, по фронту которого БРФ считывает с шины данных за время преобразованную с помощью АЦП в двоичный код величину Umax. Компаратор 7 служит для точного определения времени t2, когда иВых достигнет максимального значения, для которого справедливо уравнение (5). После считывания сигнала Umax БРФ формирует управляющий импульс, который с выхода 2 БРФ поступает на вход 2 БВЗ 6, сбрасывая его в исходное нулевое состояние, на вход узла управления 5 створками, опорожняя грузо- приемный бункер 4, а на вход демпфера 10, подавляющего колебания упругого элемента весоизмерительного устройства 3, после опорожнения бункера. После закрытия створок бункера 4 БРФ з начале следующего цикла дозирования вырабатывает скорректированный сигнал управления исполнительным механизмом 2. представ0
5
0
5
0
5
0
5
0
5
ляющий собой серию импульсов, число которых определяется по формуле:
N N ±ДМ,
где N - число импульсов управления в предыдущем цикле;
AN - корректирующая поправка.
Корректирующая поправка связана с ид пропорцией:
±AN N, ид
где UHOM - потенциал, соответствующий номинальной массе дозы. Время t3-t2 на считывание Umax определяется в основном быстродействием АЦП 8 и составляет единицы микросекунд, что на несколько порядков меньше времени второго переходного процесса. Следовательно существенно возрастает производительность дозирования, при этом точность за счет учета фактического по f(fi) значения Рд.с. остается достаточно высокой, соизмеримой с точностью весовых дозаторов.
Принимая во внимание, что длительность переходного процесса, вызванного скачкообразным изменением Рд.с. достигает 50% времени работы дозатора, сокращение цикла на данную величину повысит производительность дозирования в 1,5 раза. Поскольку для большинства высокопроизводительных фасовочно-упаковочных автоматов время дозирования равно примерно времени упаковывания то выпуск готовой продукции может быть увеличена почти на 17%.
Формулаизобретения Устройство управления процессом порционного дозирования сыпучих материалов, содержащее дозатор, привод которого подключен к выходу исполнительного механизма, весоизмерительный узел с грузопри- емным бункером, снабженным узлом управления створками, отличающее- с я тем, что, с целью повышения производительности устройства, оно содержит последовательно соединенные блок выделения и запоминания максимального сигнала и компаратор, последовательно соединенные аналого-цифровой преобразователь и блок расчета коррекции дозы и формирования управляющих сигналов, а также демпфер, кинематически связанный с весоизмерительным узлом, причем информационный вход блока выделения и запоминания максимального сигнала и второй вход компаратора соединены с выходом весоизмерительного узла, вход сброса блока выделения и запоминания максимального сигнала и входы управления демпфера и узла управления створками соединены с первым выходом блока расчета коррекции
дозы и формирования управляющих сигналов, вторым выходом соединенного с входом исполнительного механизма, а входом синхронизации - с выходом компаратора,
К
Umax
Фиг. 1
выход блока выделения и запоминания максимального сигнала соединен с входом аналого-цифрового преобразователя.
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ весового дозирования сыпучих материалов | 1989 |
|
SU1615566A2 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
| Автоматический весовой порционный дозатор | 1984 |
|
SU1186956A1 |
| Цифровое устройство управления весовым дозированием | 1984 |
|
SU1167440A1 |
| Весы с автоматическим изменением диапазонов | 1989 |
|
SU1793260A1 |
| УСТРОЙСТВО ДЛЯ СНАРЯЖЕНИЯ АРТИЛЛЕРИЙСКИХ БОЕПРИПАСОВ | 2017 |
|
RU2657034C1 |
| СПОСОБ ПОРЦИОННОГО ВЗВЕШИВАНИЯ СЫПУЧИХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369846C1 |
| Способ весового дозирования горной массы | 2017 |
|
RU2658153C1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2028979C1 |
| Устройство для управления дозированием сыпучих и жидких материалов | 1983 |
|
SU1191890A1 |
Изобретение относится к технике автоматического дозирования и может быть использовано для регулирования процессов порционного дозирования на предприятиях пищевой и химической промышленности. Изобретение позволит повысить производительность дозирования: устройство содержит дозатор, привод которого подключен к выходу исполнительного механизма, весоизмерительный узел с грузоподъемным бункером, снабженным узлом управления створками, блок расчета коррекции дозы и формирования управляющих сигналов, аналого-цифровой преобразователь, демпфер, блок выделения и запоминания максимального сигнала, фиксирующий максимальную амплитуду Umax сигнала 1)Вых на выходе весоизмерительного устройства, и компаратор, импульс на выходе которого вырабатывается в момент времени t2, при котором Увых Umax. Данный импульс стро- бирует считывание значения Umax блоком расчета и коррекции дозы и формирования управляющих сигналов БРФ, после чего БРФ вырабатывает сигнал, сбрасывающий блок выделения и запоминания максимального сигнала БВЗ в исходное состояние и управляющий опорожнением грузоподъемного бункера и демпфированием упругого элемента весоизмерительного устройства. Так как Umax, кроме сигнала ид, пропорционального массе дозы, содержит сигнал, пропорциональный динамическому давлению Рдс, то учет его фактического значения позволяет выделить из Umax значение ид. Для шнековых дозаторов с дискретным электроприводом Рдс есть функция частоты f управляющих импульсов, формируемых БРФ. Он располагает текущим значением f и может точно рассчитать величину Рдс для любого момента времени. Сигнал ид, пропорциональный массе дозы, определяется по формуле: ид Umax - КРдс (ti), где К - коэффициент передачи весоизмери- теля в установившемся режиме. Поскольку для определения Umax не требуется дополнительного времени, а расчет Pflc(t2) завершается задолго до момента tz, то время взвешивания определяется только быстродействием АЦП и не превышает нескольких микросекунд, т. е. практически равно нулю. Таким образом применение данного устройства позволяет практически исключить затраты на взвешивание, повышая тем самым производительность дозирования в среднем в 1,5 раза. Учет фактического значения Рдс (t2) позволяет сократить высокую точность определения ид. 2 ил. fe 00 GJ GO 00 fc
Фиг.2
