Способ относится к весовому дозированию горной массы и может быть использован в шахтных подъемных установках.
Известны способы весового дозирования горной массы, реализуемые за счет установки дозатора или бункера на взвешивающее устройство.
Известен способ весового дозирования сыпучих материалов, заключающийся в том, что задают в текущие моменты времени сигнал, пропорциональный заданному расходу массы, подают на привод питателя корректирующий сигнал и сигнал, пропорциональный заданному расходу массы, для разгружения бункера и формирования расхода массы по величине, равной заданному расходу, и измеряют текущее значение массы материала в бункере (см. авторское свидетельство СССР №932265, кл. G01G 11/08. Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов).
Недостатком способа является техническая сложность реализации измерения массы сыпучего материала в бункере.
В шахтном погрузочно-дозировочном устройстве для загрузки двух скипов дробленая руда складируется в аккумулирующем бункере. Затем открываются затворы загрузочного устройства и руда через воронку, и распределитель руды попадает в дозатор. Доза руды отмеряется весовым датчиком, подающим импульс на закрытие затворов загрузочного устройства. При приходе скипа под загрузку затвор дозатора получает импульс на открывание от датчика точной остановки скипа; доза руды по выдвижному лотку высыпается в скип. Весовой датчик, фиксируя разгрузку дозатора, дает импульс на закрытие затвора и подъем выдвижного лотка, механически связанного с затвором. Датчик, фиксирующий закрытое положение затвора, дает импульс на разблокировку и включение подъемной машины; в начале подъема скипа дается импульс на открывание затворов загрузочного устройства. Затем цикл повторяется (см. Горная энциклопедия / Под ред. Е.А. Козловского. - М: Сов. энциклопедия. Т. 4. Ортин - Социосфера. 1989).
Недостатком способа является техническая сложность реализации измерения веса руды в дозаторе, заключающаяся в необходимости установки дозатора на специальных весах.
Данный способ принят за прототип.
Цель изобретения заключается в упрощении технической реализации процесса весового дозирования горной массы.
Поставленная цель достигается за счет того, что при подаче горной массы из аккумулирующего бункера питателем в дозатор и загрузке скипа из дозатора производят измерение времени работы питателя, веса горной массы в скипе и осуществляют последующее регулирование продолжительности работы питателя в зависимости от отклонения измеренного веса горной массы от требуемого веса, при этом первая загрузка дозатора горной массой осуществляется по минимальному объему, определяемому из условия максимальной насыпной плотности горной массы.
В основу предлагаемого способа положено условие, что между соседними загрузками насыпная плотность горной массы изменяется незначительно. Вместе с тем, в процессе перегрузки горной массы ее плотность может плавно изменяться в широких пределах.
Способ может быть реализован следующим образом.
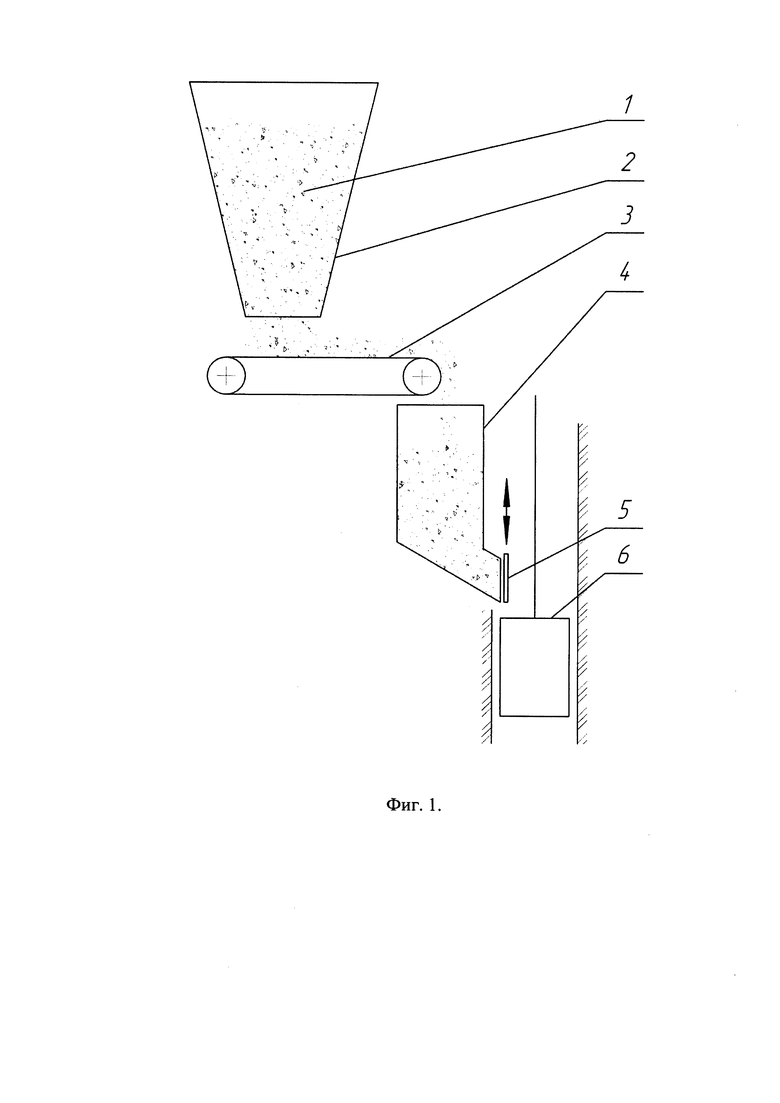
Горная масса 1 (фиг. 1) находится в аккумулирующем бункере 2, откуда питателем 3 подается в дозатор 4. При открытии затвора 5 происходит загрузка скипа 6.
Скорость перемещения горной массы 1 питателем 3 постоянна. Соответственно, объем горной массы 1, поступающей в дозатор 4, прямо пропорционален времени работы питателя 3.
Вес горной массы 1 в дозаторе 4 определяется объемом и насыпной плотностью горной массы 1.
В начале работы подъемной установки первая загрузка дозатора 4 горной массой 1 посредством питателя 3 осуществляется по объему. При этом измеряется продолжительность работы питателя 3.
Объем первой загрузки дозатора 4 минимален и определяется на основании статистических данных для конкретных условий эксплуатации подъемной установки. Объем дозы в дозаторе 4 при первой загрузке определяется из условия максимальной насыпной плотности горной массы 1.
Требуемый объем первой загрузки дозатора 4 может быть реализован одним из известных способов, например установкой датчика уровня горней массы 1 в дозаторе 4, который дает сигнал на остановку работы питателя 3 после заполнения дозатора 4 горной массой 1 до уровня, соответствующего объему дозы.
При подъеме скипа 6 с горной массой 1 определяется вес горной массы в скипе G1 одним из известных способов, например по величине тока подъемного двигателя подъемной машины или с помощью весоизмерительной тензометрической системы, установленной на подвесном устройстве скипа.
Далее определяется весовая производительность работы питателя 3 при первой загрузке дозатора 4
 ,
,
где t1 - время работы питателя при первой загрузке.
Рассчитывается разность между требуемым весом горной массы в скипе G0 и весом горной массы в скипе G1 при первом подъеме скипа
AG1=G0-G1.
Для коррекции времени последующей загрузки скипа 6 рассчитывают поправку в продолжительности работы питателя 3
 .
.
Учитывая что насыпная плотность горной массы 1 изменяется незначительно, определяют время работы питателя 3 при второй загрузке дозатора 4 горной массой 1
t2=t1+Δt1.
Последующее дозирование горной массы 1 осуществляется за счет работы питателя 3 в течение времени t2, что позволяет осуществить дозирование горной массы 1 по весу, равным или близким к требуемому весу горной массы в скипе G0.
Во время второго подъема скипа 6 определяется вес горной массы в скипе G2.
Определяется весовая производительность работы питателя при второй загрузке
 .
.
Далее рассчитывается разность между требуемым весом горной массы в скипе G0 и весом горной массы в скипе G2 при втором подъеме скипа
ΔG2=G0-G2.
Рассчитывается поправка в продолжительность работы питателя 3
 .
.
Время работы питателя 3 при третьей загрузке дозатора 4 горной массой 1 определяется
Δt3=t2+Δt2.
Соответственно, в дальнейшем определяется весовая производительность работы питателя 3 при i-й загрузке
 ,
,
где Gi - вес горной массы в скипе при i-м подъеме скипа; ti - время работы питателя при i-й загрузке.
Определяется разница между требуемым весом горной массы в скипе G0 и весом горной массы в скипе Gi при i-м подъеме скипа
ΔGi=G0-Gi.
Рассчитывается поправка в продолжительность работы питателя 3
 .
.
Время работы питателя 3 при i+1-й загрузке дозатора 4 горной массой 1 определяется
Δti+1=ti+Δti.
Таким образом, предлагаемый способ весового дозирования горной массы включает подачу горной массы из аккумулирующего бункера питателем в дозатор и загрузку скипа из дозатора, измерение времени работы питателя, веса горной массы в скипе и последующее регулирование продолжительности работы питателя в зависимости от отклонения измеренного веса горной массы от требуемого веса, при этом первая загрузка дозатора горной массыой осуществляется по минимальному объему, определяемому из условия максимальной насыпной плотности горной массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления дозатором | 1988 |
|
SU1606874A1 |
| Устройство для управления дозатором | 1986 |
|
SU1413436A2 |
| Устройство управления дозатором | 1990 |
|
SU1791724A1 |
| Устройство для управления дозатором | 1985 |
|
SU1283537A1 |
| ДОЗАТОР ВЕСОВОЙ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2003 |
|
RU2260775C2 |
| Способ дозирования текучих пористых материалов | 1988 |
|
SU1679200A1 |
| БРИКЕТ ДЛЯ МЕТАЛЛУРГИЧЕСКОГО ПРОИЗВОДСТВА, БРИКЕТ ДЛЯ ПРОМЫВКИ ГОРНА ДОМЕННОЙ ПЕЧИ И СПОСОБ ИЗГОТОВЛЕНИЯ БРИКЕТОВ | 2001 |
|
RU2183679C1 |
| Способ управления скиповой подъемной установкой | 1987 |
|
SU1641757A1 |
| СПОСОБ НЕПРЕРЫВНОГО ВЕСОВОГО ДОЗИРОВАНИЯ МАТЕРИАЛА "РИНТА" | 1991 |
|
RU2029249C1 |
| СПОСОБ ДОЗИРОВАНИЯ | 2017 |
|
RU2660035C1 |
Способ относится к весовому дозированию горной массы и может быть использован в шахтных подъемных установках. Данный способ весового дозирования горной массы включает подачу горной массы из аккумулирующего бункера питателем в дозатор и загрузку скипа из дозатора, при этом производят измерение времени работы питателя, веса горной массы в скипе и осуществляют последующее регулирование продолжительности работы питателя в зависимости от отклонения измеренного веса горной массы от требуемого веса, при этом первая загрузка дозатора горной массой осуществляется по минимальному объему, определяемому из условия максимальной насыпной плотности горной массы. Технический результат заключается в упрощении технической реализации процесса весового дозирования горной массы. 1 ил.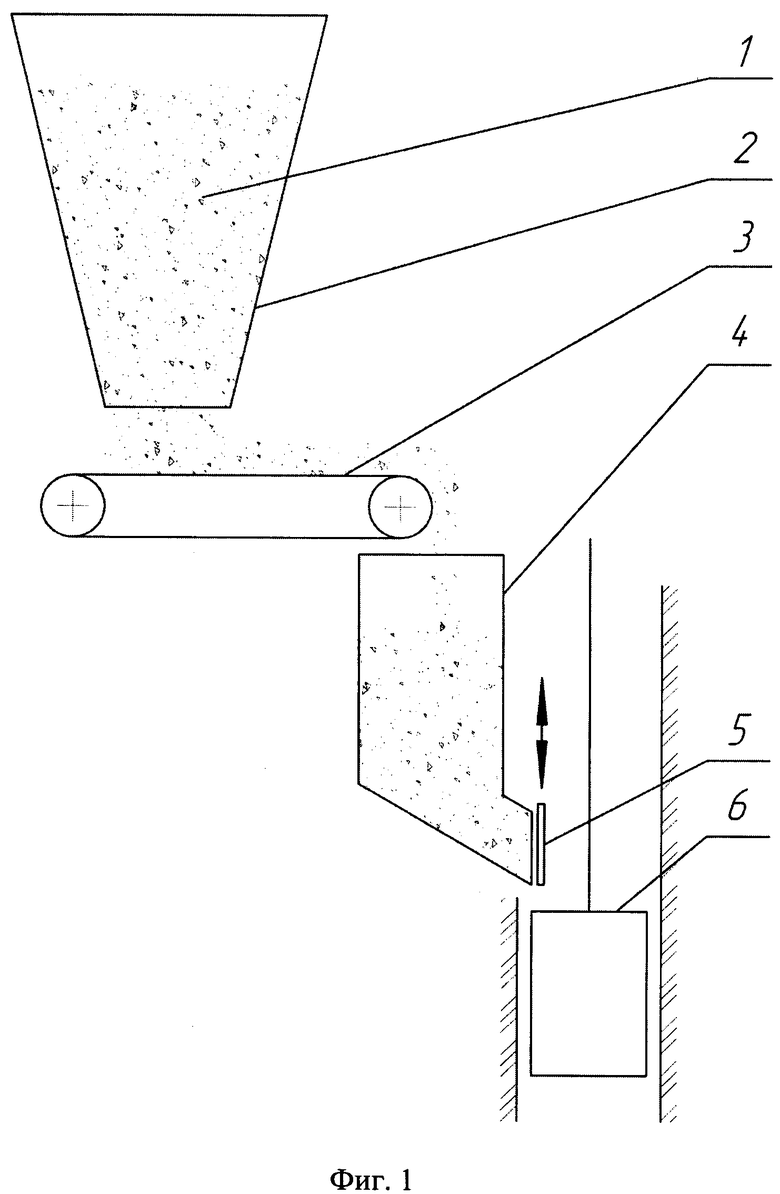
Способ весового дозирования горной массы, включающий подачу горной массы из аккумулирующего бункера питателем в дозатор и загрузку скипа из дозатора, отличающийся тем, что производят измерение времени работы питателя, веса горной массы в скипе и осуществляют последующее регулирование продолжительности работы питателя в зависимости от отклонения измеренного веса горной массы от требуемого веса, при этом первая загрузка дозатора горной массой осуществляется по минимальному объему, определяемому из условия максимальной насыпной плотности горной массы.
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| US 5074435 A, 24.12.1991 | |||
| US 5423455 A, 13.06.1995 | |||
| CN 201264808 Y, 01.07.2009.. | |||

